
4-PUS/PUU并联机构在机床上的应用*
2015-04-19 02:03郑小民邹晓晖王红州
机械制造 2015年11期
□ 郑小民 □ 邹晓晖 □ 高 健 □ 王红州
1.江西省机械科学研究所 南昌 330002
2.沈阳凯迪绝缘有限公司 沈阳 110025
并联机床是将具有高刚度、高精度、高负载能力等优点的并联机构[1]应用在机床行业的一种新型数控加工设备,并联机床实质上是现代机器人技术和机床结构技术相结合的产物,其原型是并联机器人操作机[2]。并联机床的基本特征是安装刀具的动平台由多个支链连接到固定平台,通过这些支链上的主动副驱动动平台运动,以改变刀具在空间的位置和姿态,从而实现刀具相对工件的进给运动。由于采用了并联结构,所以并联机床相对传统机床具有的特点[3]:① 系统刚度质量比大;② 响应速度快;③ 机械本体的精度较高;④ 环境适应性强;⑤技术附加值高。
目前国内外研究的并联机床大都集中在3自由度和6自由度的机型上,而对机床来说,要加工复杂的零件最多需要5个自由度就可以完成。所以,6自由度并联机构应用在并联机床上将有1个多余的自由度,这显然是一种不必要的浪费。而3自由度的并联机构为完成复杂的任务,就必须借助其它2个自由度的运动,这将使并联机构的优点大打折扣。因此,研究5自由度的并联机床是非常有意义的。燕山大学研究了构型分别为5-UPS/PRPU和6-PUS/UPU的五轴联动并联机床[4,5];浙江大学研究了构型为 5-PUS/UPU 的五轴联动并联机床[6];南阳理工学院研究了构型为5-UPS/UPU的五轴联动并联机床[7];笔者研究了4-PUS/PUU并联机构在机床上的应用。
1 4-PUS/PUU并联机床构型

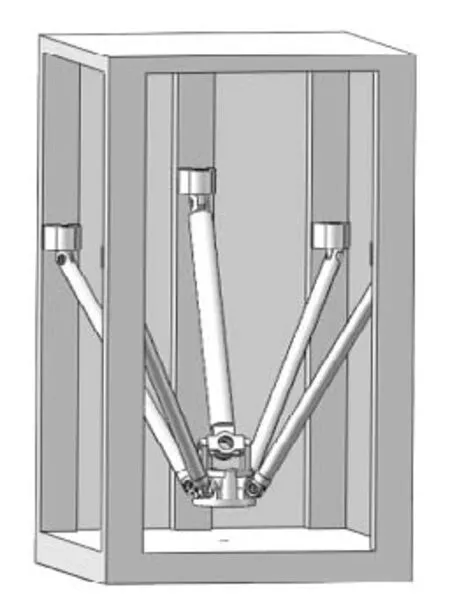
▲图1 4-PUS/PUU并联机床
如图1所示,4-PUS/PUU并联机床由机架、4条相同的无约束支链、1条约束支链以及动平台组成。无约束支链由滑块、连杆组成,滑块一端通过移动副与机架连接,另一端通过虎克铰与连杆连接,连杆另一端通过球铰与动平台连接。约束支链同样由滑块、连杆组成,滑块一端通过移动副与机架连接,另一端通过虎克铰与连杆连接,连杆另一端通过虎克铰与动平台连接。机架上安装5条平行导轨,其中4条导轨按照长方形的4个顶点位置布置,分别与4条无约束支链连接,第5条导轨安装在长方形一条边的中点位置,与约束支链连接,滑块可在导轨上移动,5个滑块运动带动5根连杆运动,再带动动平台运动,即实现动平台及其上安装的电主轴的三平两转空间5自由度运动。
2 4-PUS/PUU并联机构的自由度分析[8]
4-PUS/PUU并联机构由机架、动平台以及连接这两部分的5条支链组成,动平台的运动情况受这5条支链的影响。每条支链包含多个运动副,而每个运动副可由运动螺旋来表示,即每条支链有自己的运动螺旋系,运动螺旋系的反螺旋为支链的约束螺旋系,表示该条支链能够提供给动平台的约束,所有支链的约束螺旋系求并可获得动平台所受的约束螺旋系,再对动平台约束螺旋系求反螺旋,可获得动平台的运动螺旋系,该运动螺旋系即为动平台的自由度,也称为4-PUS/PUU机构的自由度。
4 条无约束支链 li(i=1、2、3、4) 具有相同的结构,支链运动螺旋如图2所示,其螺旋系表达为:
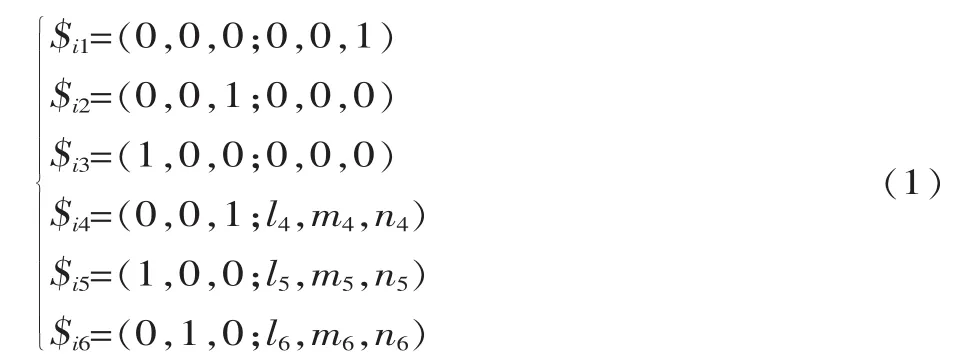
该螺旋系为六系螺旋,不存在反螺旋(无约束螺旋系),故这4条支链不能给动平台提供约束。
约束支链l5的运动螺旋如图3所示,其螺旋系表达为:

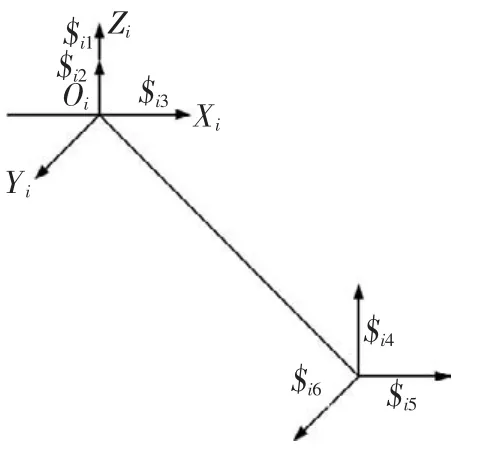
▲图2 无约束支链运动螺旋
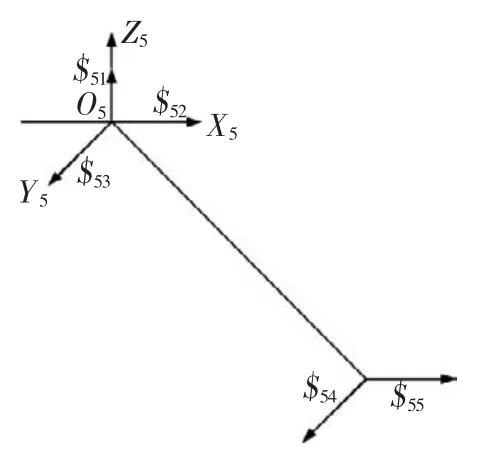
▲图3 约束支链运动螺旋
对该螺旋系求逆,获得其反螺旋为:

该螺旋即为约束支链提供给动平台的约束。对所有支链的约束螺旋求并,可得动平台的约束螺旋系,由于4-PUS/PUU机构中5条支链只有1条约束支链提供约束,故动平台的约束螺旋与约束支链的约束螺旋相同,为:

对该螺旋求反螺旋,获得动平台的运动螺旋系为:

该运动螺旋系即为动平台的自由度,表示动平台具有三维平动两维转动空间5自由度的运动。
3 基于SolidWorks的4-PUS/PUU机构运动学分析
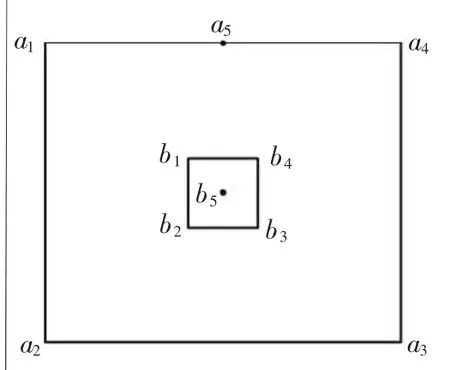
如图4所示,在SolidWorks中建立4-PUS/PUU并联机床各零部件的三维模型,并按照所需连接方式完成装配图。如图5所示,机架底面相互垂直的两个方向为X、Y轴,按右手法则确定Z轴,建立基础坐标系,并给出了4-PUS/PUU机构的连杆及连接点的表达方式。图6所示为俯视连杆连接点的位置示意图,图7所示为动平台上各连接点的位置示意图,其具体尺寸见表1。
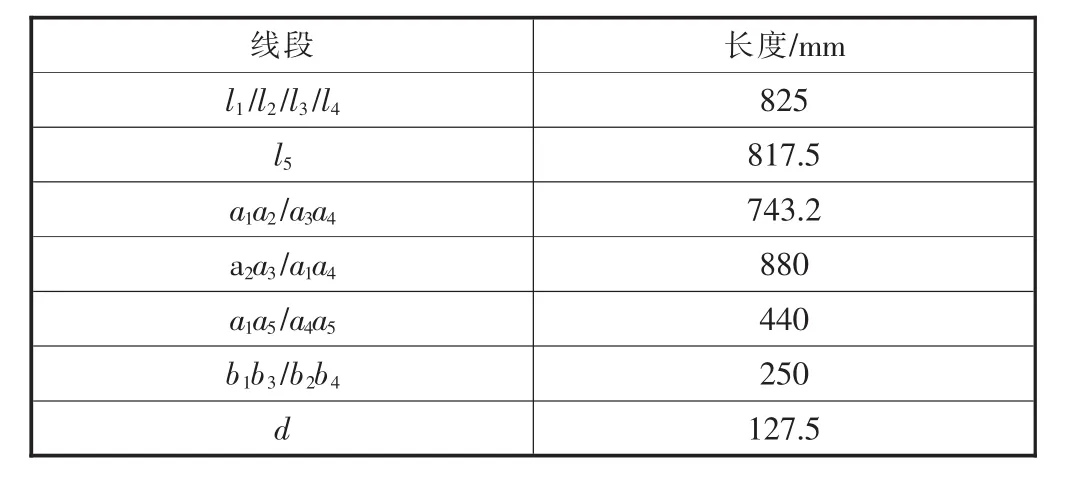
表1 4-PUS/PUU机构具体尺寸
▲图4 4-PUS/PUU机构的三维建模

▲图5 4-PUS/PUU机构标记符号
▲图6 俯视标记符号

▲图7 动平台连接点标记符号
以 a1、a2、a3、a4、a5的坐标分别为 (-371.6,-440,1036)、 (371.6, -440,1036)、 (371.6,440,1036)、 (-371.6,440,1036)、 (-371.6,0,1207.85)为初始位置,动平台在0~2 s内匀速沿X轴平动100 mm,动平台在3~4 s内匀速沿Y轴平动100 mm,动平台在5~6 s内匀速沿Z轴平动100 mm,可获得动平台运动过程中支链滑块的运动情况,图8给出了约束支链滑块(可用a5点来表示)在0~6 s内的位移、速度和加速度。

▲图8 约束支链滑块的运动输出
4 结论
(1)采用螺旋理论建立了4-PUS/PUU机构各支链运动螺旋系,并通过运动螺旋求交,约束螺旋求并的原则得出动平台的自由度数目和性质,该机构具有三维平动两维转动空间5自由度的运动。
(2)在SolidWorks软件中建立4-PUS/PUU机构零部件的三维模型,并通过适当的约束建立机构的三维装配图,通过给定动平台的运动轨迹及速度获得支链滑块的位置、速度、加速度等运动学数据。
[1]程世利.并联机构若干基本问题的研究[D].南京:南京航空航天大学,2011.
[2]汪劲松,黄田.并联机床-机床行业面临的机遇与挑战[J].中国机械工程,1999,10(10):1103-1107.
[3]韩先国.并联机床相关理论及设计方法研究[D].北京:北京航空航天大学,2002.
[4]梁龙晓.5UPS-PRPU冗余并联机床控制系统设计与冗余驱动控制研究[D].秦皇岛:燕山大学,2014.
[5]梁顺攀,窦玉超,赵永生.6-PUS/PUU并联机构开放式控制系统的研究[J].计算机工程与设计, 2014, 35(1):303-309.
[6]李凌丰,彭铁柱,刘际轩.空间五自由度并联机床[P].中国专利:CN101850519A,2010-10-06.
[7]贾艳丽,刘岩.基于Raleigh-Ritz的五自由度并联机床刚度分析及仿真[J].制造业自动化, 2014,36(6):99-111.
[8]黄真,赵永生,赵铁石.高等空间机构学[M].北京:高等教育出版社,2006.
猜你喜欢
装备制造技术(2020年2期)2020-12-14
汽车实用技术(2017年16期)2017-09-21
中国塑料(2015年9期)2015-10-14
实用手外科杂志(2015年2期)2015-08-28
饲料博览(2015年4期)2015-04-05
河南科技(2015年2期)2015-02-27
机械工程师(2015年10期)2015-02-02
北京航空航天大学学报(2014年1期)2014-12-19
河南科技(2014年3期)2014-02-27
食品科学(2013年19期)2013-03-11
