
直升机模拟训练平台的构建与应用
2015-04-15 01:37王毅琳
中国医疗设备 2015年3期
王毅琳
第三军医大学西南医院 信息科,重庆 400038
直升机模拟训练平台的构建与应用
王毅琳
第三军医大学西南医院 信息科,重庆 400038
本文通过对直升机转运平台与视景系统进行综合集成,构建了直升机模拟训练平台。该平台主要由转运平台(包括机械系统、控制系统、电气系统)以及视景系统构成,可为军事卫勤保障训练提供可反复使用且高度逼真的训练环境,推动传统卫勤训练模式向实战化转变。本文详细阐述了该平台的构建及应用过程,指出该平台对于提高卫勤训练效果,推动我军部队战救能力的跃升有着重要意义。
卫勤保障;直升机模拟训练;转运平台;视景系统
0 前言
卫勤训练是提高军队医院野战机动卫勤保障战斗力的重要途径,可通过贯彻“训战一致”的要求,增强训练适应性,提高卫勤保障能力,是遂行多样化军事任务的根本前提。但传统卫勤训练中存在诸多问题,如实际训练与战救理论脱节、缺乏对急救能力检验评估的科学手段、与部队信息化条件下的集成训练相分离等,由此模式训练出的战救技能是否真正具备强大的实战保障能力的问题日益凸显。为适应新时期军事训练转型要求,研究和探索卫勤战救训练新手段和新方法,已成为当前军事卫勤训练关注的焦点。本研究在总结既往卫勤训练经验的基础上,探索构建直升机模拟训练平台以科学组织卫勤训练的方法,旨在开展模拟战场和灾害现场转运救治伤员训练,大幅提高军队医院卫勤训练效果。直升机模拟训练平台主要由转运平台和视景系统两部分组成,转运平台是卫勤模拟训练的主要载体,视景系统负责为模拟直升机飞行训练提供各种逼真的场景。
1 转运平台运动机构的选择
转运平台运动机构有并联和串联两种形式,串联机构(Serial Mechanism,SM)的设计原理是基于对人上肢功能的模拟,早期工业机器人多数为串联形式,结构简单、工作空间大。并联机构(Parallel Mechanism,PM)可以定义为动平台和定平台通过至少两个独立的运动链相连,具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。从机构运动学来看,这两种机构存在对偶关系,串联机构正解简单,反解复杂;并联机构正解复杂,反解简单。串联机构的刚度和承载能力低,且串联形式会导致操作臂的输出误差是各关节误差的积累和放大;而并联机构具有刚度重量比高、惯性小、承载力大、高速、无累积误差的特点,因此,转运平台运动机构选择并联机构。
以并联方式驱动的转运平台具有如下特点:① 与串联机构的悬臂梁相比,由于并联机构平台由6个缸同时支撑,因此其刚度大且结构稳定,具有比串联机构更高的承载能力;且并联机构平台采用对称式结构,各向同性也要比串联机构好;② 串联机构精度低、误差大,末端件上的误差是各关节误差的积累和放大,而并联机构平台没有误差积累和放大,精度更高;③ 在位置求解方面,与串联机构相比,采用并联机构的6自由度平台求正解困难,求反解却非常容易。由于在线实时计算时是求反解,因此,采用并联机构更容易实现。
2 转运平台的设计
转运平台主要由机械系统、控制系统和电气系统3部分构成。
2.1 机械系统
转运平台机械系统包括伺服电动缸,伺服电动机,耳轴,上、下万向铰链和上、下两个平台等部件,采用6根带驱动器的可伸缩杆通过球铰和固定平台相连,通过胡克铰与运动平台相连形成并联机构。胡克铰位于上平台与6个支链连接处,对保证平台的正常运行和整个结构的刚度起着关键作用,运动平台和固定平台上的铰链呈6边形分布。转运平台机械系统示意图,见图1。
平台主体和运动部件均采用优质钢质材料,其中电动缸活塞杆为钢质镀珞处理,活塞杆头部为不锈钢材质,活塞杆与缸体接触部位采用密封防尘部件。6个交流伺服电动机通过丝杆控制活塞杆作直线伸缩运动,活塞杆通过耳轴与上铰链座活动连接,上铰链座固定在上平台上。可通过控制6个交流伺服电动机的转速和转向,完成平台在空间6个自由度(x、y、z、α、β、γ)上的运动,使平台完成要求的横摇、纵摇和伸降等工作,从而模拟出救援直升机的各种空间运动姿态[1]。伺服电动缸可通过丝杆副的机械运动将电机的旋转运动转换为推杆的直线运动,利用伺服电机的闭环控制特性,实现对推力、速度和位置的精密控制。伺服电动缸示意图,见图2。

图1 转运平台机械系统示意图
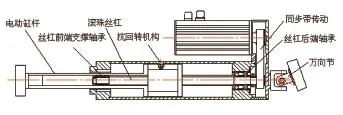
图2 伺服电动缸示意图
2.2 控制系统
转运平台控制系统工作流程如下:首先按照飞行任务要求设定位姿、运动路径和轨迹,根据所确定的轨迹,将上平台中心点的轨迹进行参数化;再将实际测得的各液压缸运动轨迹进行位置正解分析,对上平台的实际控制精度进行分析比较,生成动平台每个自由度在运动过程中每一时刻的位置、速度和加速度实时值[2];然后将平台的空间状态和运动轨迹数据输入到控制主机,通过将上平台中心点的轨迹进行位置反解求解各缸的伸长量,得到驱动杆的位移和速度作为各液压缸的控制信号;最后将控制指令(纵摇角、横摇角)按固定频率发送到多轴控制卡上,再经伺服驱动器送给伺服电动机,伺服电动机带动伺服电动缸推动平台运动,完成上平台的空间运动[3]。转运平台控制系统原理框图,见图3。
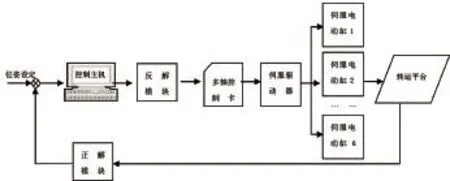
图3 转运平台控制系统原理框图
2.3 电气系统
转运平台电气系统采用220 V三相交流电,在额定频率和功率容量下运行;具有自主稳压保护功能,可保障当电源波动较大或突然断电时转运平台不受损坏,恢复供电重启后平台可正常工作。
3 视景系统的设计
视景系统用于为直升机转运伤病员的卫勤训练过程显示被模拟直升机白天、黄昏、黑夜、平原、山地、大海等舱外景象,以及模拟直升机起飞、上升、飞行、下降、着陆等飞行过程的全部动作,使卫勤队员在训练过程中可得到丰富逼真的视觉体验。视景系统由视景数据库、视景成像系统和显示系统组成[4]。其中,视景数据库中包含着卫勤训练任务所必需的数据信息;视景成像系统用于处理和显示视景数据;视景显示系统用于为卫勤飞行训练任务提供足够的视场角、逼真的图像和准确的地理空间位置,具有模拟不同大气环境效应的能力,可通过提供纹理等特殊效果为卫勤训练提供高沉浸感、高真实感的视景环境。
3.1 视景数据库
视景数据库的作用是存储视景仿真模型的几何信息、坐标变换、绘制状态(如材质属性)、纹理映射关系、组织结构、LOD(Level of Detail)层次等模型属性或系统场景缺省的参数设置,供实时仿真使用[5]。视景数据库包括模型数据库、地形数据库、航线数据库、特殊人物数据库、纹理数据库等,以满足视景系统的需要。
考虑到直升机飞行模拟的需要,视景系统的模拟覆盖范围包括机场、平原、山地、草原、大海等近千公里的大地形场景。由于救援直升机起飞和降落点范围内的视点距离模型较近,因此这部分模型应当进行详细设计。机场模型的内容包括跑道、滑行道、停机坪、登机桥以及候机楼、塔台等标志性建筑。地形数据库包括整个仿真范围内的地形地貌模型。纹理数据库用于保存模型数据库和地形数据库所用到的所有纹理资源[6]。
3.2 视景成像系统
该系统采用三维卫星数据和高程数据开发各类救援飞行场景的三维视景库。视景系统实时解算视景数据库多边形,视景工作站分别输出多通道视景。为满足投影距离近的现场实际情况需求,可采用高反射率的反射镜,将投影器图像反射到背投幕,缩短影片投影距离,提高幕内使用空间。
3.3 视景显示系统
该系统采用球形幕实像显示系统以满足训练人员在模拟机舱内的沉浸感和真实感。机舱周围使用涂有光学涂料的大直径球形屏幕作投影屏,可以有效实现场景显示的立体感和纵深感效果,而且球形屏幕直径越大,显示图像的立体感和纵深感就越强[7-8]。在视景系统中,利用多通道拼接技术或头位跟踪技术来形成大视场,视场角水平可达360°,垂直可达180°,可实现逼真的场景效果。球形幕实像显示系统选用畸变调整功能强的投影器作为投影设备,以解决因投影屏幕为曲面造成的图像畸变大等问题。
4 直升机模拟训练平台的应用及效果
作为医院卫勤保障中坚力量,卫勤分队在抗震救灾、抗洪抢险、军事演练等各类重大行动中承担着大量任务如伤病员搜寻、抢救、转运等。过去由于缺乏必要的训练平台,训练内容常与实战环境脱离,导致训练过程的真实感不强、训练效果不佳的问题日益突出。直升机模拟训练平台建成后的一年内,医院卫勤力量针对信息化条件下我军卫勤保障的特点,根据任务需求灵活设定训练场景,通过平台开展了不同场景下救援技能的训练,已累计培养卫勤队员20余人,训练对象包括卫勤队员、卫勤指挥员以及其他卫勤岗位干部等;培养了可熟练进行平台操作和维护的技术人员5人,开展了卫勤训练数十次,并得到了上级首长和同行专家的多次观摩指导。直升机模拟训练平台作为一种全新的模拟训练手段,不仅延伸了传统训练方式,更强调了贴近实战和训战合一,得到了首长和同行专家的肯定。
4.1 创新训练模式
实战化训练强调训练内容、训练背景和训练指挥的实战化,遵守“仗怎么打、兵怎么练”的原则。我院通过改变传统卫勤训练方式,按照“训用一致”的要求,大胆创新训练装备,将直升机模拟训练平台融入军事后勤训练之中,提升了卫勤训练层次,达到了边训练边保障的目的;通过组织经常性的模拟演练,及时发现了可能存在的问题,并通过调整和优化卫勤保障流程,总结经验教训,提升了卫勤保障水平。
4.2 锤炼卫勤队员综合素质
直升机模拟训练平台的应用一方面提升了卫勤指挥能力,提高了各类复杂环境下伤员救治转运的卫勤指挥技巧;另一方面使卫勤队员的综合素质在实战化训练中得到了锻炼和提高,使参与训练的救援医师在训练中能够迅速掌握现代战争和自然灾害中的伤情伤势特点以及危重伤员的抢救要点,强化了伤员救治能力的培养,提高了卫勤队员对战场和灾害现场心理疾患的调理与疏导能力,促进其掌握灾害防护方法、急救措施等,从而提高整体救护能力。
5 结论
本研究通过转变传统卫勤保障训练方式,探索了利用直升机模拟训练平台科学组织卫勤训练的方法。构建的直升机模拟训练平台可通过模拟战场和救灾环境下利用直升机平台转运伤病员的场景,为军事卫勤保障训练提供可反复使用且高度逼真的训练环境,其转运平台可以模拟救援直升机从起飞到降落全过程中的各种空间运动姿态,视景系统可为受训者提供高度逼真的沉浸感环境,使得卫勤队员在模拟训练环境中可获得与真实转运环境几乎完全一样的救援场景体验,大大提高了卫勤训练效果,提升了部队卫勤保障能力。
[1] 王辉,陈学森.飞行模拟器六自由度运动平台的仿真研究[J].机械科学与技术,2012,31(5):778-782.
[2] 晁智强,宁初明,李欣泽,等.六自由度平台控制系统分析[J].机床与液压,2014,42(9):44-48.
[3] 施昕昕,常思勤.一种新型6自由度运动平台的控制研究[J].机械工程学报,2014,50(3):56-62.
[4] 高煊,郑康平,郭俊丽,等.飞行模拟系统中分布交互式视景的设计与实现[J].指挥控制与仿真,2013,35(5):84-87.
[5] 郭立普,魏瑞轩,侯海平,等.无人机编队飞行视景仿真关键技术研究[J].计算机工程,2012,38(10):230-233.
[6] 邱岳恒,卢京潮,刘秉.直升机视景仿真及座舱仪表显示系统实现[J].测控技术,2010,29(7):13-15.
[7] 张燕燕,黄其涛,韩俊伟,等.飞行模拟器视景系统的设计与实现[J].系统仿真学报,2009,(12):3662-3667.
[8] 黄炳,陈俊丽,万旺根,等.飞行视景仿真系统研究与实现[J].计算机仿真,2009,(11):235-238.
Construction and Application of a Helicopter Simulation Training Platform
WANG Yi-lin
Department of Information, Southwest Hospital, Third Military Medical University, Chongqing 400038, China.
With integration of the helicopter transport platform and the visual system, a helicopter simulation training platform was designed. The platform mainly consisted of the transport platform (the mechanical system, control system and electrical system included) and the visual system, which was intended to provide a highly-realistic and repeatedly-usedtraining environment for military health service training so as to promote the transformation of the conventional training pattern into realistic training. This paper expounded the establishment and application of the system, pointing out the signi fi cance of the system in improving the training e ff ectiveness and promoting the rescue ability for the army.
health service; helicopter simulation training platform; transport platform; visual system
R82
A
10.3969/j.issn.1674-1633.2015.03.006
1674-1633(2015)03-0024-03
2014-11-11
2015-01-09
国家高技术研究发展计划(863计划)项目资助(2012AA02A616)。
作者邮箱:wanylin@163.com
猜你喜欢
传染病信息(2022年2期)2022-07-15
西南国防医药(2021年6期)2021-07-19
齐齐哈尔大学学报(自然科学版)(2021年3期)2021-04-19
计算机测量与控制(2018年7期)2018-07-27
灾害医学与救援(电子版)(2018年1期)2018-06-05
中学科技(2018年2期)2018-03-15
军事运筹与系统工程(2017年4期)2017-08-29
中学科技(2016年12期)2017-01-07
中学科技(2016年11期)2017-01-07
舰船科学技术(2015年8期)2015-02-27
