可调姿态一维运动平台
2015-04-13 09:31李华丰朱振宇兰一兵李强王霁
计测技术 2015年3期
李华丰,朱振宇,兰一兵,李强,王霁
(中航工业北京长城计量测试技术研究所,北京100095)
0 引言
大范围纳米级精密测量中,通常采用Z 向测量范围极小的原子力显微镜、扫描隧道显微镜等纳米测头,这类测头的Z 向测量范围通常仅有十几微米[1],因此要求纳米测量机的Z 向宏观运动精度优于1 μm。大范围纳米样板的形貌高度一般只有几十纳米,要在整个测量范围内均能观测到样板形貌,则要求样品水平姿态可小范围调整[2]。为了提高纳米样板的稳定性,其基底一般达到数毫米。而纳米级测量通常要持续数小时甚至数天时间。因此要实现大范围纳米样板的测量,需要样品载物台有毫米级运动范围、亚微米级运动分辨力、姿态小范围可调,同时还要求驱动元件发热量低,以减小对测量系统的影响。
目前比较成功的大范围可调姿态一维运动平台解决方案是德国SIOS 大范围纳米测量机中采用的四音圈电机支撑驱动方案[3]。该方案的优势在于结构简单,无需额外机械结构即可实现直线运动,定位精度达纳米级,音圈电机处于力平衡状态,无过定位问题。缺点是音圈电机驱动力较小,无法实现大载荷运动;由于工作台工作在力平衡状态,控制系统始终处于调整状态,并不稳定,容易出现保护性自锁;音圈电机需要始终通电以克服工作台及样品的重力,导致驱动部件发热较严重,影响干涉测量系统的工作环境,使纳米测量机的温度漂移比较严重。
本文提供了另一种大范围可调姿态一维运动平台解决方案:采用零间隙滚珠丝杠四点支撑,压电陶瓷直线电机驱动。该方案更适合于具有可溯源测量特性的大范围纳米测量机。
1 可调姿态一维运动平台总体方案
可调姿态一维运动平台主要用于纳米测量机等精密测量设备的样品承载、测量进给、姿态调整,主要技术指标为:升降运动范围40 mm,运动分辨力0.2 μm,姿态调整范围±0.1°,姿态调整分辨力0.1″,承载力200 N。
根据三点定面公理,不在同一直线上的三点确定一个平面,故只要有不共线且位置可控的三个支点,就可得到一个位置和姿态均可控的平面。以运动平台的运动方向为Z 轴建立三维笛卡儿坐标系,并使可控支点的运动方向与Z 轴方向一致,则对工作台的姿态调整就是控制工作台绕X 轴、Y 轴的旋转角度。
使用三点定位平面,当调整平面姿态时,无法实现平面绕X,Y 轴旋转姿态的独立调整,即调整平面绕X 轴夹角时,其绕Y 轴夹角也发生改变,反之亦然。这不利于运动系统与姿态监测系统间建立明确的对应关系,容易出现不期望的姿态变化,运动控制算法比较复杂。
本文采用四点对称支撑平面方案,相邻两支点的连线分别平行于X 轴及Y 轴。图1 为工作台先绕Y 轴旋转α 角,再绕X 轴旋转β 角的调整过程。小转角条件下,可以认为两个方向的旋转相互独立。四点过定位支撑还可以部分消除传动机构、支撑机构的间隙,利于减小运动平台的空程。
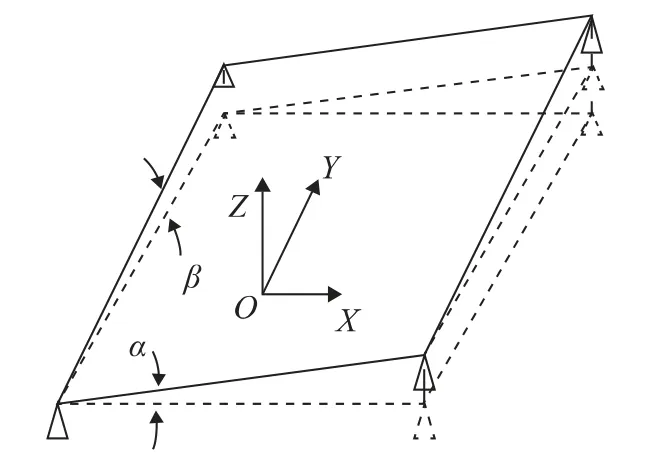
图1 四支点对称支撑分离姿态调整过程示意图
根据以上分析,可调姿态一维运动平台的总体结构如图2所示。四个丝杠螺母位于300 mm×300 mm的四个顶点,通过柔性连接器支撑移动平台;丝杠分别由四个压电陶瓷直线电机通过陶瓷环驱动,带动丝杠螺母沿Z 向运动;四电机的同步协调运动实现工作台的Z 向运动、绕X 轴/Y 轴的转动;四个角度编码器分别检测对应丝杠的旋转角度,作为控制系统的位置反馈元件。
本方案的特点在于:四点过定位支撑实现工作台的升降运动及小范围姿态调整;角度编码器监视下的精密丝杠可以给支点(丝杠螺母)提供足够精细的运动分辨力;对称分布的四点支撑可以建立工作台空间姿态与丝杠运动状态的非耦合对应关系;采用具有自保持能力的压电陶瓷直线电机驱动,可使驱动力得到极大改善,系统发热量低。
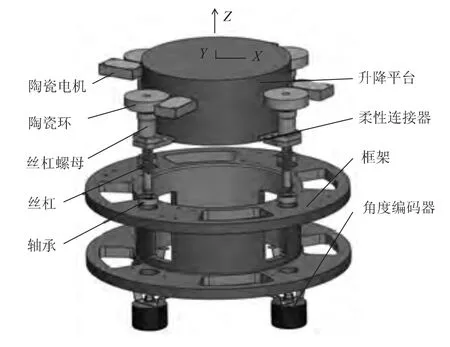
图2 可调姿态一维运动平台总体结构
2 可调姿态一维运动平台结构方案
依据总体方案,可调姿态一维运动平台需要确定丝杠参数、丝杠间距、驱动结构、反馈结构等参数。
2.1 可调姿态一维运动平台支点结构
在传统应用中,丝杠只作为传动结构将滚转运动转换为平动,导向由导轨完成。在可调姿态一维运动平台中,丝杠的作用不再局限于运动形式的转换,其同时具有导向功能;丝杠的轴向负载很低,运行速度慢;运动平台主要要求丝杠有较高的运动分辨力和重复定位精度,因此对丝杠的选择主要关注其空程量、最小进给量等参数。
滚珠丝杠起动力矩极小,不会产生粘滞滑动现象,能进行微量进给,精密滚珠丝杠的最小进给量优于0.1 μm[4]。采用螺母预加载方式可以减小滚珠丝杠空程,提高丝杠的重复定位精度。
按照THK 滚珠丝杠综合产品目录[4],选择DIK2004-6 系列,C0 级研磨丝杠,丝杠外径20 mm,导程4 mm。当滚珠丝杠垂直使用时,螺母与移动平台运动方向一致[5],故升降平台的运动分辨力也可达到0.1 μm。
在滚珠丝杠进给分辨力有限的条件下,通过增加支点间跨度可以提高工作台姿态调整分辨力。在图3所示的支点跨度与空间姿态关系示意图中,有

式中:θ 为工作台绕X 或Y 轴旋转的角度;L 为对应支点间的径向距离;δ 为支点间的高度差。图3 中,σ 为支点的径向变形量。
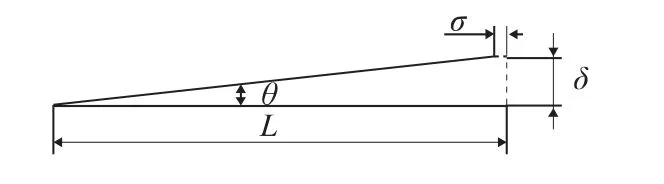
图3 支点跨度与空间姿态关系示意图
取精密滚珠丝杠最小进给量0.1 μm,系统姿态调整分辨力指标为0.1″,可计算支点间的最小距离约0.2 m。综合系统其它参数,取四支点沿X,Y 轴方向的跨距均为L=0.3 m。
为了提高系统稳定性,丝杠采用两端固定方式,固定轴承距离为[4]

式中:H 为丝杠两端支撑轴承距离;L行程为工作台的有效行程;L螺母为螺母长度;L轴承为轴承厚度;L余量为系统预留余量。
依据以上设计,取L行程=40 mm,L螺母=62 mm,L轴承=10 mm,L余量=13 mm,则H=120 mm。
在图2所示的结构中,当升降平台发生空间旋转时,由于其本身刚度较大,必然导致支点发生径向变形,支点的最大径向变形量为

式中:θmax为工作台绕坐标轴的最大转角。
将L=0.3 m,θmax=0.1°代入式(3)得σmax=0.33 μm。即每个支点丝杠在工作过程中由于工作台空间姿态变化造成的最大径向变形0.33 μm,远小于精密轴承的径向跳动指标[6],故可忽略径向受力对丝杠的影响。
2.2 可调姿态一维运动平台驱动结构
可调姿态一维运动平台的驱动结构采用压电陶瓷直线电机驱动陶瓷环方式将电机的直线运动转换为滚珠丝杠的旋转运动。
压电陶瓷直线电机依据压电驻波原理工作,在驱动电压作用下,电机的端部做椭圆形圆周运动,拨动被驱动面运动;断电后,端部与被驱动面有一定压力,具有自保持能力;最大驱动力及保持力均可达到8 N,低速运行平稳,响应速度快,位移分辨力优于0.1 μm,可驱动陶瓷环实现旋转运动[7]。压电陶瓷环的最小半径为

式中:Δ电机为电机的最小位移分辨力;Ph为滚珠丝杠导程;ΔZ为工作台的最小位移分辨力。将Δ电机=0.1 μm,Ph=4 mm,ΔZ=0.2 μm 代入式(4)得Rmin=0.318 mm。根据厂家的标准产品序列,选用半径R=5 mm 的陶瓷圆环。
每个丝杠能提供的推力[4]为

式中:η1为丝杠正效率;F 为电机驱动力。
将F=8 N,R=5 mm,Ph=4 mm 代入式(5),设η1=0.9,得每个支点推力达Fa=226 N,满足系统对每个支点推力50 N 的要求。
2.3 可调姿态一维运动平台姿态、位置监测单元
可调姿态一维运动平台的姿态、位置监测单元完成对滚珠丝杠旋转状态的检测,为闭环控制系统提供位置反馈信息。
系统要求位置检测结构的最低角度分辨力为

将ΔZ=0.2 μm,Ph=4 mm 代入式(6)得Δω=3.14×10-4rad。对于光电角度编码器,其每圈脉冲数需不少于5000。
系统中选用每圈脉冲数为10000 的光电角度编码器通过4 细分实现1/40000 的分辨力,则位置检测部分的标称位移分辨力为0.1 μm。
3 可调姿态一维运动平台运动效果试验
根据可调姿态一维运动平台结构的特点可知,工作台的升降运动和小范围转动均通过四支点的协调动作实现。验证工作台的运动效果,可以通过试验各支点的定位精度、升降运动过程中工作台姿态变动量指标换算得到。
在可调姿态一维运动平台中,光电角度编码器对丝杠旋转状态进行监测,控制系统据此对运动平台进行精细调整,使工作台具有足够高的位移分辨力和角度调整分辨力;运动平台的具体位置及姿态则由运动平台系统外的位置及姿态传感器进行测量。
将运动平台四个支点分别编号0,1,2,3 号,分别以50,100,500 μm/s 的速度运行一段距离,使用激光干涉仪分别测得各支点的最终运行结果,其与理想值的偏差如表1所示。
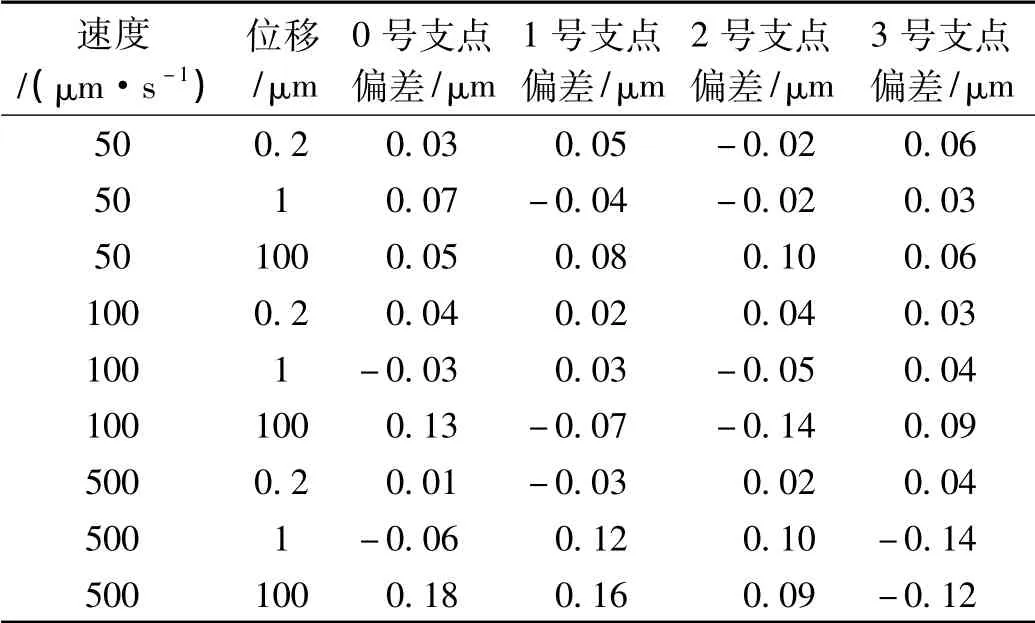
表1 四支点定位运动分辨力
使工作台以500 μm/s 速度上升40 mm,运动过程中利用相位偏移干涉测角仪记录工作台的姿态变化,得曲线如图4所示。
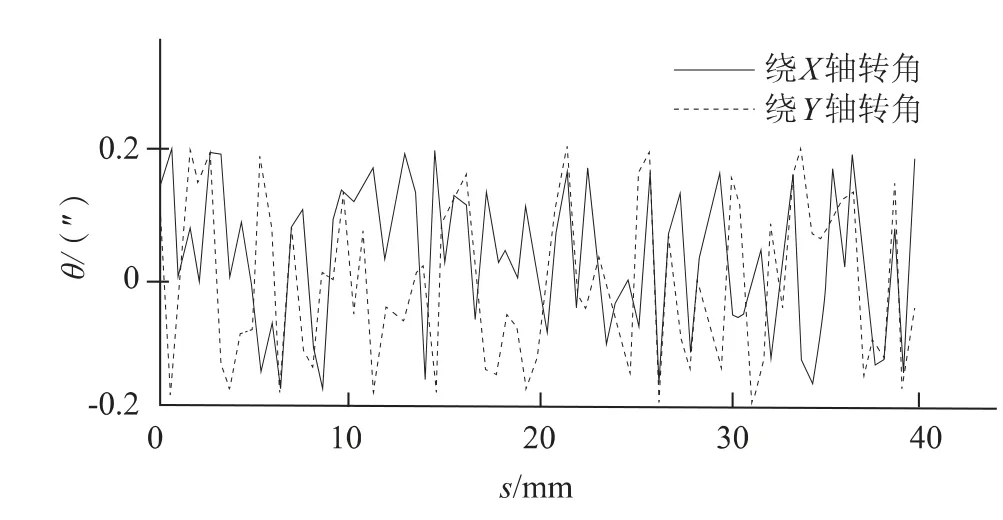
图4 升降过程中工作台姿态变化曲线
从实验数据可以得到,工作台的运动范围可达40 mm,每个支点的定位偏差均可达到0.2 μm,升降过程中工作台的姿态变化量约0.2″。在实际应用中,各支点分别以不同的运动参数同步运行,工作台即可发生升降、绕X 和Y 轴转动或者升降过程中小范围转动。
4 结论
本文提供了一种可调姿态一维运动平台解决方案,采用四个协调运动的滚珠丝杠支撑工作台实现运动平台的大范围升降运动与小范围转动,采用具有自保持能力的压电陶瓷直线电机驱动,发热量低,静止时不发热,特别适用于大范围纳米测量机等需要对样品姿态进行实时精密调整的计量测式设备。
[1]白春礼.扫描隧道显微术及其应用[M].上海:上海科学技术出版社,1991.
[2]陆伯印,朱鸿锡,曲兴华,等.大位移纳米级精度分子测量机的研究[J].仪器仪表学报,1993,14(1):107-112.
[3]SIOS Technology.Nanopositioning and Nanomeasuring Machine User Manual[M/CD].San Mateo,California:SIOS Technology Corp,2006/2007.
[4]THK.滚珠丝杠综合产品目录[M/CD].东京都:Toho Seiko Co.Ltd,2010.
[5]百度文库.滚珠丝杠设计选型及校核强度计算[EB/OL].[2012-03-17].http://wenku.baidu.com/view/4e383063-48d7c1c708a14564.html.
[6]NSK.滚动轴承技术手册[M/CD].东京都:日本精工株式会社,2008.
[7]Nanomotion LTD.HR2 Ultrasonic Motor User Manual[EB/CD].Yoknoem,Israel:Nanomotion LTD,2002.
猜你喜欢
红外技术(2022年4期)2022-04-25
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2017年8期)2017-11-27
邢台学院学报(2016年4期)2016-02-28
医疗卫生装备(2015年9期)2015-12-27
中国光学(2015年5期)2015-12-09
深圳职业技术学院学报(2015年5期)2015-11-30
机械制造与自动化(2014年1期)2014-03-01