大型机电设备故障信号实时采集方法研究仿真
2015-04-13 00:22:30张波
电力与能源 2015年2期
张 波
(青岛市产品质量监督检验研究院,山东青岛 266071)
大型机电设备结构复杂且工作环境恶劣,属于多发性故障的高技术机械产品,而且以目前的技术水平无法保证发动机在无故障状态下运行。大型机电设备主要存在的故障情况包括:机电系统供电系统故障、机电系统冷却通道堵塞以及机电设备的传动系统故障等3种故障情况。为了实现对大型机电设备的故障检测,研究有效的智能故障检测方法,成为机械和信号处理学科研究的理论热点。信号处理和对故障信号的特征提取成为故障诊断的关键和核心步骤。对故障信号的时域分析、频域分析、抑或是统计分析,作为信号处理的基本方法,旨在提取大型机电设备振动系统故障信号的故障特征,实现对大型机电设备的故障诊断。对故障信号进行实时采集和有效检测是基础,研究大型机电设备的故障信号进行实时采集方法具有重要的意义和价值[1]。
大型机电设备的故障诊断是一个庞大的系统工程,涵盖了信号处理、人工智能、模式识别等领域,大型机电设备的故障诊断是建立在故障信号的实时采集基础上,传统方法中,对大型机电设备的故障信号的实时采集主要有时域分析故障信号采集法、频域分析故障信号采集法、统计分析故障信号采集法、信息论分析故障信号采集法等[2-5]。通过信号采集提取大型机电设备故障信号的故障特征,为模式识别和故障分类识别提供数据基础。然而,传统方法采用时频分析的统计信号处理方法进行故障信号采集,对低信噪比的故障信号检测性能不好[6-10]。
针对传统的信号采集和处理方法出现的问题,为了提高对大型机电设备故障的检测和诊断能力,本文提出一种基于非线性时间序列分析和相空间重构的大型机电设备故障信号实时采集方法,实现故障的检测和诊断。首先构建大型机电设备的故障数据检测模型,基于相空间重构分析的故障诊断方法,通过经验模态分解方法在重构的相空间中提取故障信号的基频信息,以此为数据基础建立智能专家系统,实现大型机电设备的故障诊断,最后进行仿真实验实现性能验证,展示了本文的故障信号实时采集方法在实现故障诊断中的优越性能。
1 大型机电设备故障信号的产生及非线性序列分析
1.1 大型机电设备故障信号的产生
对大型机电设备智能故障诊断的第一步是进行故障信号的模型构建,故障信号根据检测手段和诊断原理分为发动及振动故障信号、大型机电设备的噪声故障信号以及其他故障信号,大型机电设备故障信号的产生主要来源于故障振动信号,以及机电设备排气、振动等工作过程中的信号。本文采用相空间重构和非线性时间序列分析方法分析大型机电设备的故障特征,设大型机电设备振动信号时间序列为{x1,x2,…,xn},当嵌入维数为m,延迟时间间隔为τ,振动时间序列{x1,x2,…,xN}以式(1)给出的向量模型形成相空间,即:

式中 i=1,2,…,K;K——重构后相空间的点数。
上述大型机电设备故障特征相关数据的数据量比较大,计算的复杂度比较高,无法对大型机电设备故障征兆进行及时的挖掘。因此,需要去除其中的冗余数据,从而降低计算复杂度,相空间维数较高,需要进行降维分析,其简化公式如下所述:

大型机电设备的故障信号形成m维空间,只要m≥2d+1,动力系统的几何结构就可以完全打开,其中是系统中吸引子的维数,吸引子表示疑似故障信号与真实故障信号的相关度,引入吸引子约束可以更好的确认故障特征。大型机电设备特征的发射波束聚焦数量能够用q进行描述,对应的大型机电设备故障特征向量的数量能够用q进行描述,则上述简化过程需要符合下述条件:

φ1是大型机电设备故障特征相关性参数。采集系统的声波束被控制在一定范围内,扫描的范围为20度至80度,一次扫描可以覆盖整个大型机电设备叶片。对大型机电设备的故障信号,采用轨迹协方差矩阵XTX的特征值作为该观测时间序列的特征。由式(3)可得

通过上述分析,实现对故障信号的波束指向性特征分析,为下一步实现故障信号特征分解和实时采集处理提供数据基础。
1.2 大型机电设备故障信号的非线性时间序列分析模型
在上述信号分析的基础上,采用非线性时间序列分析方法分析大型机电设备故障信号,非线性时间序列分析的框架模型如图1所示。

图1 故障信号的非线性时间序列分析的框架模型
对大型机电设备的故障模型进行阵元换能的傅里叶变换,需要计算大型机电设备故障特征的最优分类平面。对于非线性时间序列x1,x2,…xn,…,设总点数为N,序列{xi}时间跨度为jτ的自相关函数为:


设置大型机电设备故障特征分量z在半径是的区域中,则最优分类平面应该满足下述条件:

通过上述分析,求出其l个特征值λ1,λ2,…,λl和特征向量矩阵Y=[y1,y2,…,yl],构建大型机电设备故障信号的非线性时间序列分析模型。
2 相空间重构及设备故障信号实时采集方法实现
在上述非线性时间序列分析的基础上,采用相空间重构方法进行设备故障信号的实时采集,传统方法采用时频分析的统计信号处理方法进行故障信号采集,对低信噪比的故障信号检测性能不好。本文提出一种基于非线性时间序列分析和相空间重构的大型机电设备故障信号实时采集方法,实现故障的检测和诊断。将故障信号模拟为一个调幅信号,得到多阵元超声换能波束指向性特征的约束函数:

基于非线性时间序列分析和相空间重构,对故障特征矩阵X进行奇异值(SVD)分解:

其中U∈Rm×m正交矩阵,V∈RM×M,且UT=U-1,VT=V-1;D∈Rm×M,且满足D=[∑0]进行大型机电设备的故障特征提取:

求出其l个特征值λ1,λ2,…,λl和特征向量矩阵Y=[y1,y2,…,yl]。为
结合上节所述的大型机电设备故障信号时域和频域分析模型,得到大型机电设备故障信号的第一个IMF分量为:

在基于非线性时间序列分析和相空间重构的大型机电设备故障信号实时采集方法基础上,为了实现故障诊断,构建在专家系统进行故障分类诊断,设训练样本集为X=[X1,X2,…,Xk,…,XN]T,将大型机电设备故障信号x(n)分解成若干IMF分量,其中任一训练样本为Xk=[xk1,xk2,…,xkm,…,xkM],对应的大型机电设备故障特征实际输出为:

通过上述分析,进行故障信号的实时采集,完成故障特征提取,实现大型机电设备的故障分类诊断。
3 仿真实验与结果分析
为了测试本文算法在进行大型机电设备故障信号采集中的性能,进行仿真实验。实验建立在某大型机电设备平台上,系统实验平台如图2所示。大型机电设备故障检测系统模型分为底层数据层、中间处理层、用户层,底层数据层负责采集数据,中间处理层负责数据的预处理,顶层是用户与系统的交互部分。使用本实验室研制的TED2012大型机电设备振动信号采集系统,进行信号采集和检测。

图2 大型机电设备故障信号检测平台
实验中,在大型机电设备3种工况模式下测试大型机电设备的性能,3种故障工况模式是通过大型机电设备系统设定方法获得,大型机电设备工作转速为2 400 r/min,信号采样频率为60 KHz,分布设定大型机电设备的进气门间隙过大、排气门间隙过大和气缸喘振以及正常工作模式,分别记为A、B和C类故障,信号采集时长100 s,采集间隔时间为0.5 s,得到信号采集时域波形如图3所示,横坐标为采集时间,纵坐标为取得的时间相关函数表达。
为了实现对信号的实时采集分析,采用本文算法进行相空间重构,得到大型机电设备三类故障下振动信号在二维坐标系下的相空间重构吸引子的描述图如图4所示。
由图可见,采用本文算法进行故障信号的重构分析,能准确反映故障信号的高维特征,信号的吸引子充分展开,为实现故障诊断提供特征基础。进一步采用本文设计的故障分类专家系统,得到三类故障样本的诊断结果,把结果在三维坐标系下表示如图5所示。由图可见这三类故障具有可分性,故障聚类能力高,基于本文设计的故障信号实时采集方法,实现了对大型机电设备的故障准确诊断。
4 结语
构建大型机电设备的故障数据检测模型,基于相空间重构分析的故障诊断方法,通过经验模态分解方法提取故障信号的特征信息,以此为数据基础建立智能专家系统,实现大型机电设备的故障诊断。研究表明,采用本文方法进行故障信号的实时采集故障诊断,故障分类性好,准确性高。
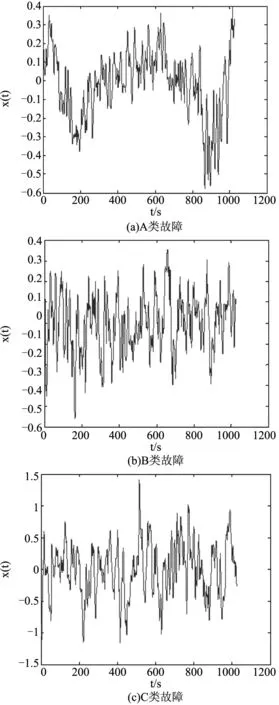
图3 大型机电设备三类故障下振动信号
[1] 汪慰军,陈 进,吴昭同,等.关联维数的计算及其在大机组故障诊断中的应用[J].上海交通大学学报,2000,34(9):1265-1268.
WANG Wei-jun,CHEN Jin,WU Zhao-tong,JIANG Ming.Calculation of Correlation Dimension and Its Application to Large Rotating Machinery Fault Diagnosis[J].Journal of Shanghai Jiaotong University,2000,34(9):1265-1268.
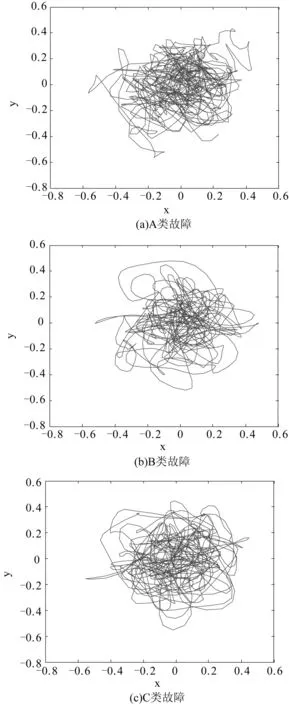
图4 大型机电设备三类故障下振动信号吸引子
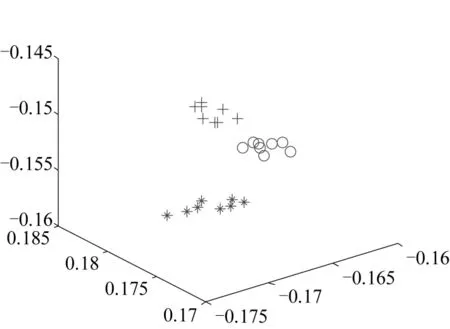
图5 大型机电设备三类故障下振动信号特征分布
[2] 韩 磊,洪 杰,王 冬.基于小波包分析的大型机电设备轴承故障诊断[J].推进技术,2009,30(3):328-331.
HAN Lei,HONG Jie,WANG Dong.The fault diagnosis of large-scale electromechanical equipment based on wavelet package analysis[J].Journal of Propulsion Technology,2009,30(3):328-331.
[3] 江龙平,徐可君,唐有才.基于分形维数的转子—机匣系统故障诊断研究[J].机械强度,2009,31(4):532-536.
JIANG LongPing,XU KeJun,TANG YouCai.FAULT DIAGNOSIS RESEARCH OF ROTOR-CASE SYSTEM BASED ON FRACTAL DIMENSION[J].Journal of Mechanical Strength,2009,31(4).
[4] 吕金虎,陆君安,陈士华.混沌时间序列分析及其应用[M].武汉:华中科技大学出版社.2002.
[5] 边肇祺,张学工.模式识别[M].北京:清华大学出版社,2000.
[6] 王 锋,孙翠华.汽车大型机电设备故障征兆挖掘技术的研究与仿真[J].计算机仿真,2013,30(10):229-232.
WANG Feng,SUN Cui-hua.Research and Simulation on Mining Technology for Automobile Engine Fault Symptoms[J].Computer Simulation,2013,30(10):229-232.
[7] 杨 俊,周丙寅,张 毅,等.基于递归图分析的压缩机故障诊断方法研究[J].计算机与数字工程,2013,41(6):984-986.
YANG Jun,ZHOU Bing-yan,ZHANG Yi,et al.Compressor fault diagnosis based on recurrence plot analysis[J].Computer and Digital Engineering,2013,41(6):984-986.
[8] 刘家亮,王海燕,姜 喆,等.垂直线列阵结构对PTRM阵处理空间增益的影响[J].鱼雷技术,2010,18(4):263-267.
LIU Jia-liang,WANG Hai-yan,JIANG Zhe,et al.Influence of ULA structure on PTRM array spatial gain[J].Torpedo Technology,2010,18(4):263-267.
[9] 尹 刚,张英堂,李志宁,等.基于MSPCA的缸盖振动信号特征增强方法研究[J].振动与冲击,2013,32(6):143-147.
YIN Gang,ZHANG Ying-tang,LI Zhi-ning,et al.Fault feature enhancement method for cylinder head vibration signal based on multiscale principal component analysis[J].Journal of Vibration and Shock,2013,32(6):143-148.
[10] 李 兵,徐 榕,贾春宁,等.基于自适应形态提升小波与改进非负矩阵分解的大型机电设备故障诊断方法[J].兵工学报,2013,34(3):353-360.
LI Bing,XU Rong,JIA Chun-ning,et al.Engine fault diagnosis utilizing adaptive morphological lifting wavelet and improved non-negative matrix factorization[J].Acta Armamentarii,2013,34(3):353-360.
猜你喜欢
现代应用物理(2021年3期)2021-11-10 13:08:24
建材发展导向(2021年13期)2021-07-28 07:15:02
建材发展导向(2021年11期)2021-07-28 06:57:26
经济技术协作信息(2018年8期)2019-01-14 03:06:36
浙江大学学报(理学版)(2016年1期)2016-05-14 09:12:47
重庆工商大学学报(自然科学版)(2015年10期)2015-12-28 07:43:58
中国交通信息化(2015年8期)2015-06-06 06:32:57
电测与仪表(2015年14期)2015-04-09 11:55:54
电测与仪表(2014年24期)2014-04-09 11:35:36
振动、测试与诊断(2014年5期)2014-03-01 01:14:21