
一种多轴车辆的测功试验台转向行驶模拟方法
2015-04-12 06:36周晓军刘晨曦
汽车工程 2015年9期
杨 勇,周晓军,刘晨曦
(浙江大学现代制造工程研究所,杭州 310027)
2015178
一种多轴车辆的测功试验台转向行驶模拟方法
杨 勇,周晓军,刘晨曦
(浙江大学现代制造工程研究所,杭州 310027)
本文中提出了一种适用于在测功试验台上进行的多轴车辆转向行驶模拟方法,提出了一种由行驶模型、转向模型和转向控制策略3部分组成的车辆模型。首先根据车辆的行驶情况,通过车辆转向控制策略和转向模型获得当前时刻的多轴车辆各轴转向角与车辆的转向状态。然后通过车辆行驶模型计算得到多轴车辆各轴当前时刻的运动状态。最后通过测功机对车辆各驱动轴进行加载,并采用电惯量模拟技术对系统不足的惯量进行补偿,使测功系统中各轴的运动状态跟随模型计算结果而变化,以实现在测功试验台上的多轴车辆转向行驶模拟。一辆多轴车辆在等速转向、加速转向、减速转向等行驶状态下进行仿真的结果,初步验证了该方法的可行性。
多轴车辆;转向模拟;测功试验台
前言
随着汽车工业的发展和市场需求,多轴车辆等特种车辆发展越来越快,对多轴车辆的各项性能评价和测试技术研究也随之展开。其中多轴车辆转向性能的研究是较为热门的研究领域。目前多轴车辆转向的研究大致可分为两个方面:(1)转向系统和转向控制算法研究,以提高车辆的可操纵性[1-2];(2)车辆室内测试台架研究,以验证零件或传动系统工作性能[3-5]。
在测功试验台上进行车辆的转向行驶模拟加载,可以测试车辆在转向时,车辆关键零件的工作性能,如差速器的差速性能、防滑性能和疲劳特性等。而对于多轴驱动车辆,还可以测试转向行驶过程中传动链中各个零部件的协同工作性能。
因此,对于整车传动系统或转向关键零部件来说,无论是对新研发的产品进行性能测试,还是对成熟的产品进行质量检验,利用测功试验台进行车辆的转向行驶模拟,都是一种有效的试验手段。
在测功试验台的转向行驶模拟方面,国外研究较多,其中Renk和Horiba等公司在多轴车辆测功试验台方面处于国际领先水平。而国内对于测功实验台的转向行驶模拟研究,主要集中在履带等单轴驱动车辆或单独的零部件试验台方面,对于多轴测功试验台整车转向行驶模拟研究较少。
为满足在测功试验台上进行多轴车辆转向行驶模拟的需求,本文中对多轴车辆的测功试验台转向行驶的模拟方法进行了研究,提出了一种适用于测功试验台(测功电机与汽车轮毂间通过万向节连接)的转向行驶的模拟方法和一种车辆模型,以实现测功实验台上的多轴车辆转向行驶模拟。
1 多轴车辆测功试验台的转向行驶模拟方法
多数多轴车辆测功试验台(测功电机与轮毂间通过万向节连接)不具备进行多轴转向行驶模拟的能力。其主要原因是此类测功试验台由于受到机械连接的限制,车辆转向轴无法进行真正的转向。因此在建立车辆模型时,通常不考虑车辆转向的因素。为使此类测功试验台具有转向行驶模拟的能力,可通过设定虚拟转向角,进行车辆转向模拟,并考虑转向因素,重新建立可用于转向行驶模拟的多轴车辆模型,并根据模型实时控制测功电机进行加载,完成多轴车辆的转向行驶模拟。
多轴车辆在进行转向行驶时,车辆各个车轮所受到的动力和负载情况可通过车辆的行驶模型计算获得。同时行驶模型必须考虑转向带来的影响。而车辆转向时的转向状态,则可通过车辆的转向模型计算获得。由于不同的转向控制策略对车辆转向产生不同的影响,因此在转向行驶模拟时也必须考虑车辆的转向控制策略带来的影响。
综上所述,测功试验台进行多轴车辆转向模拟时的新车辆模型应由多轴行驶模型、多轴转向模型和多轴转向控制策略组成。
在整个测功试验台转向行驶模拟中,控制系统根据车辆模型实时计算获得车辆各个驱动轮的行驶状态。通过控制测功电机进行加载,采用电惯量模拟技术补偿系统不足的惯量,使车辆各个驱动轮依照模型计算结果进行运动,以实现测功试验台上的车辆转向模拟。模拟方法如图1所示。
1.1 多轴车辆行驶模型
以车辆行驶方向为X轴正方向,垂直地面向上方向为Z轴正方向,建立坐标系。其中Y轴方向根据右手定则确定。
坐标系与车身固定,无论车辆是否转向都只考虑车辆在X方向上的运动,并只考虑车辆在水平路面上运动的情况。
图2为车辆行驶或转向时在X和Z平面受力分析图。
由X方向的力平衡条件可得
(1)
式中:M为车辆质量;Fxi为各轴车轮受到X方向的滚动阻力;Fw为空气阻力;vx为车辆X方向速度;i表示车辆各个轴。
由Z方向的力平衡条件可得
∑Ni-Mg=0
(2)
式中Ni为各轴车轮受到的支持力。
当车辆转向行驶时,作用在各个车轮上的牵引力矩Tij(j=1,2表示轴的两侧)和滚动阻力矩NibiR的方向会随车轮转角变化而变化,所以在研究车辆在X和Z平面运动时,应对上述力矩进行修正,即牵引力矩修正为Tij·cosδi,滚动阻力矩修正为NibiR·cosδi,δi为各个轴车轮转向角,对于δi,逆时针为正,顺时针为负。不考虑车体俯仰摆动,以轴n车轮与地面接触点为旋转中心,列绕Y轴的力矩平衡条件可得
(3)
式中:bi为各轴车轮与地面的滚动阻力系数;Ri为各轴车轮半径;li为各轴到质心距离,定义轴在质心之前的距离为正,轴在质心之后的距离为负;Li为各轴到轴n的距离;LC为质心到轴n的距离;HC为质心到地面的距离;Tij为各个车轮上受到的牵引力矩。
车辆各个轴悬架独立悬挂在车辆底盘上,底盘的变形忽略不计,则悬架与底盘的连接点应始终保持在一条直线上,如图3所示。
故而可得到悬架与底盘的直线约束方程为
(Δi-Δ1)/(li-l1)=(Δ2-Δ1)/(l2-l1)
(4)
其中:Δi=Ni/Ki,i=3,…,n
式中Ki为各轴包括独立悬架和轮胎在内的综合刚度。
图4为车轮旋转方向受力分析图。
(5)
式中:Cαi为各个轴车轮综合侧偏刚度;ωr为车体横摆角速度;vy为车辆Y方向速度;Jw为车轮转动惯量。
车轮角速度与车速关系如图5所示,由于车辆驱动用转向桥存在等速万向节和轮间差速器,故车辆在转向时各个轴车轮角速度应满足以下关系:
(6)
式中B为轮距。
对式(6)两端求导可得加速度关系:
(7)
多轴车辆各个驱动轴之间存在轴间差速器,故分配到各个驱动轴上的驱动力矩应满足如下关系:
(8)
式中Td为总驱动力矩。
综上所述,式(1)~式(8)为考虑转向因素的多轴车辆的行驶模型。
1.2 多轴转向模型
在建立车辆转向模型时,忽略车辆侧倾对转向的影响,只考虑车辆横摆运动和径向运动两个自由度。图6为多轴车辆2自由度线性转向模型。
通过拉格朗日方程,可得到多轴车辆的两自由度转向普适模型。
(9)
(10)
式中I为车体横摆转动惯量。
1.3 多轴车辆转向控制策略
目前多轴车辆的转向控制方式可分为两种。
(1) 纯机械转向方式 设计转向机构,使车辆各个车轮转角符合阿克曼原理,减少车辆在转向时发生的滑移。无转向控制策略。
(2) 机械和电控结合的转向方式[7-9]车辆某根轴为机械转向(通常为前轮),其他轴上车轮转角则须通过控制策略计算给出,使车辆按照特定的方式转向。常见的控制策略有零侧偏角控制等。
不同的控制策略下,车辆的最终模型不同,因此在车辆模型中考虑转向控制策略,可实现在测功实验台上不同控制策略下的车辆转向行驶模拟,增加了测功试验台的车辆转向行驶模拟范围。
2 仿真分析
根据上述提出的转向模拟方法和转向行驶模型,对某3轴车辆等速转向、加速转向和减速转向等行驶状态进行仿真,以验证测功试验台转向模拟方法的可行性。被仿真车辆的主要参数如表1所示。
该车辆采用机械和电控结合的转向方式,其中轴1为机械转向,轴2和轴3为电控转向,在相同仿真条件下,采用不同转向控制策略会获得不同车辆转向时的动态特性,但对于验证试验方法的可行性而言,并无影响。因此在仿真过程中车辆的转向控制策略采用较为常见的零侧偏角控制策略,且令轴2和轴3的转向角保持相同。
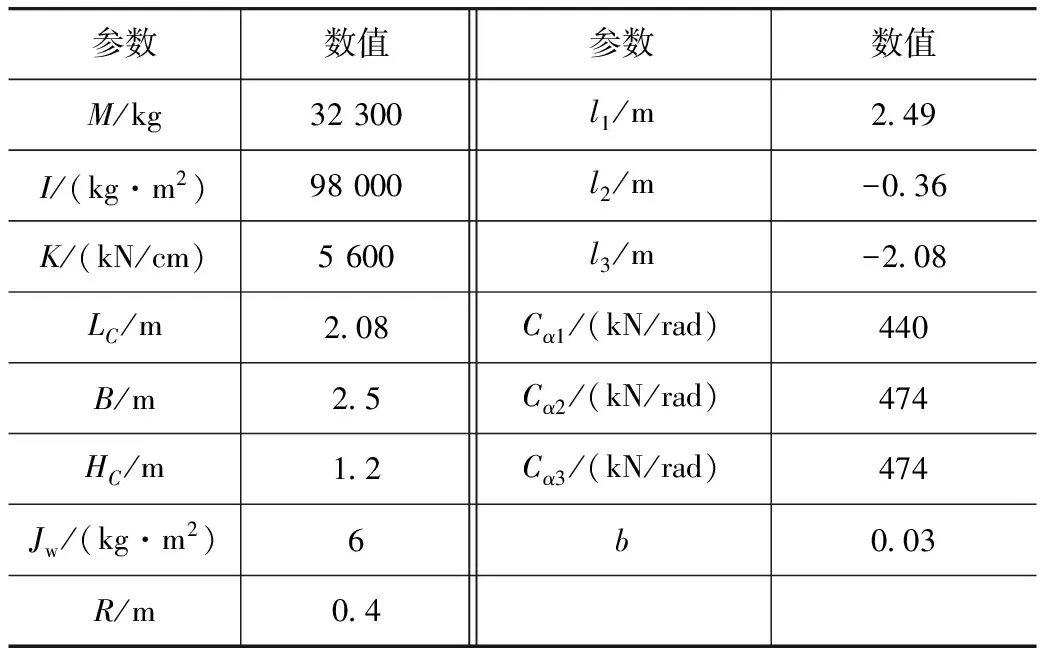
表1 多轴车辆参数
车辆初速度为10km/h,单个测功电机单元的等效系统惯量为144kg·m2,通过电惯量模拟技术对剩余的惯量进行模拟,车辆轴1的虚拟转向角、总驱动力矩和行驶状态等仿真条件如表2所示。
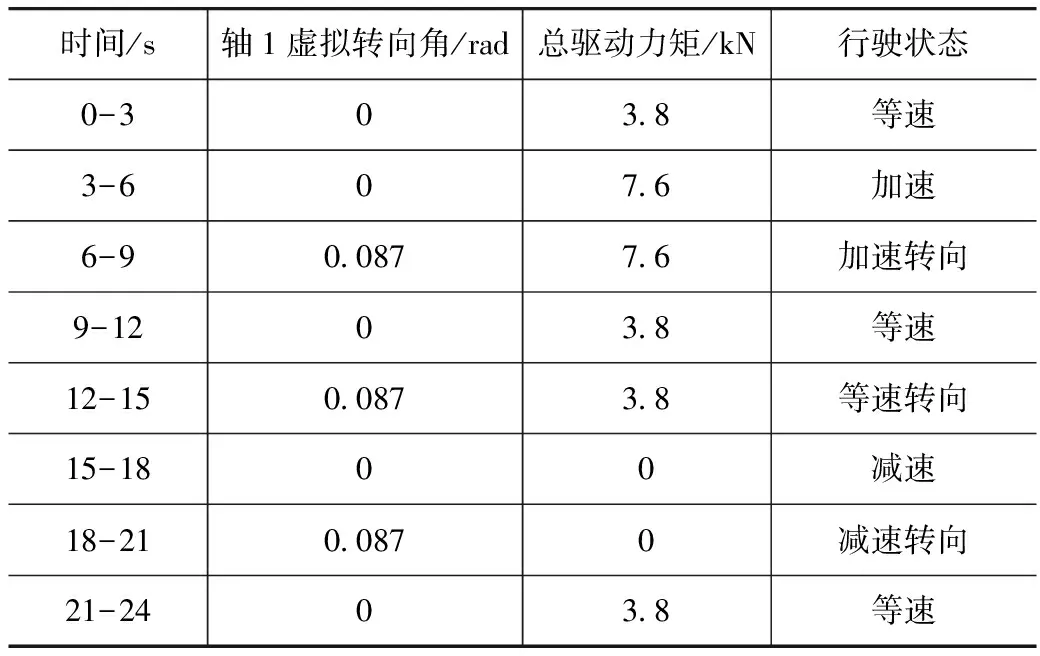
表2 仿真条件
仿真结果如图7~图10所示。从仿真结果可以看出,车辆转向性能与车辆驱动系统之间存在相互影响。
图7为车辆的转向性能的仿真情况。由于转向控制策略采用了零侧偏角控制,所以车辆在转向时,转向角δ2和δ3自动调整,无论车辆在何种行驶状态下,其Y方向速度均趋向于0。同时在不同行驶状态下,虽然输入的转向角δ1相同,但车辆横摆角速度不同,车辆加速时增大,车辆减速时减小,与实际情况相符。
图8为车辆加速度、车速与模型实时计算的理论值的变化曲线。由图可见:通过试验台模拟,能够使各个曲线较好跟随模型计算的曲线而变化;车辆在转向行驶时,车辆前进方向加速度会受到转向的影响,且均为阻碍车辆的运动,与实际情况相符。
图9为仿真过程中,车辆各个车轮的运动情况。由图可见:当车辆在转向行驶时,两侧车轮产生一定转速差,但各个轴同侧车轮转速几乎相同,在非转向行驶时,各个车轮转速几乎相同,与实际情况相符合;转速能够较好地跟随由模型算出的理论曲线而变化。
图10为实际系统理论驱动力矩及测功机负载力矩变化情况。由图可见:车辆在转向时,两侧车轮理论驱动力矩及测功机负载力矩在转向初期有较大不同,待转向稳定后相差较小,与轮间差速器的动力分配特性相符。
3 结论
对多轴车辆的测功试验台转向行驶的模拟方法进行了研究,提出了一种适用于测功试验台(测功电机与轮毂间通过万向节连接)进行多轴车辆转向行驶模拟的方法,并相应给出了一种多轴车辆模型。利用该模型进行了多轴车辆在等速转向、加速转向和减速转向下的仿真。结果表明,车辆各个状态下的曲线均与实际情况相符,初步证明了提出的测功试验台转向模拟方法的可行性。
[1] 薛兆俭.线控转向系统实验台研究[D].西安:长安大学,2008.
[2] Krishna Rang Avajhula, Jacob Tsao H S. Active Trailer Steering Control of an Articulated System with a Tractor and Three Full Trailers for Tractor-track Following[J] . International Journal of Heavy Vehicle Systems,2007,14(3):271-293.
[3] 戴军康.汽车主减速器总成综合性能试验台的研究[D].合肥:合肥工业大学,2008.
[4] 黄斌,吴森,曹正.电动轮驱动车辆电子差速技术研究[J].武汉理工大学学报,2013,35(6):134-138.
[5] 冀强.履带车辆综合传动系统性能试验台的设计[D].济南:山东大学,2011.
[6] 喻凡,林逸.汽车系统动力学[M].北京:机械工业出版社,2005.
[7] 张小江,高秀华,王云超,等.多轴转向车辆模型跟踪控制分析[J].重庆大学学报,2013.
[8] 王云超.多轴转向车辆转向性能研究[D].长春:吉林大学,2007.
[9] Gao X Z, Guo J H, et al. Coordinated Control of Electronic Stability Program and Active Front Steering[J]. Procedia Environmental Sciences,2012,12(B):1379-1386.
A Steering Simulation Method for Multi-axle Vehicle on Dynamometer Test Bench
Yang Yong, Zhou Xiaojun & Liu Chenxi
InstituteofAdvancedManufacturingEngineering,ZhejiangUniversity,Hangzhou310027
In this paper, a multi-axle vehicle steering driving simulation method suitable for dynamometer test bench is put forward and a vehicle model is proposed consisting of driving model, steering model and steering control strategy. Firstly, according to vehicle driving situation, the current steering angle of each axle and steering states of multi-axle vehicle are obtained based on steering control strategy and steering model. Then the current movement state of each axle of vehicle is obtained by the calculation with vehicle driving model. Finally, each driving axle of vehicle is loaded through dynamometer and the inadequate moment of inertia of the system is compensated with electrical inertia simulation technique, so as to make the movement state of each axle in the system follows that of model calculation result, realizing the steering driving simulation of multi-axle vehicle on dynamometer. The results of simulation on a multi-axle vehicle in three states of steering with constant speed, steering with acceleration and steering with deceleration preliminarily verify the feasibility of the method proposed.
multi-axle vehicle; steering simulation; dynamometer test bench
原稿收到日期为2013年12月12日,修改稿收到日期为2014年4月17日。
猜你喜欢
电力系统保护与控制(2022年19期)2022-10-21
现代仪器与医疗(2022年3期)2022-08-12
汽车实用技术(2022年11期)2022-06-20
现代电力(2022年2期)2022-05-23
防爆电机(2021年3期)2021-07-21
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
汽车工程(2019年4期)2019-05-07
汽车实用技术(2018年22期)2018-12-08
山东青年(2016年12期)2017-03-02
