
多轴车辆在复杂路面行驶时的阻力模拟方法研究
2015-04-12 06:34:24周晓军杨辰龙莫锦秋刘晨曦
汽车工程 2015年6期
杨 勇,周晓军,杨辰龙,莫锦秋,刘晨曦
(1.浙江大学现代制造工程研究所,杭州 310027; 2.上海交通大学机械与动力工程学院,上海 200240)
2015125
多轴车辆在复杂路面行驶时的阻力模拟方法研究
杨 勇1,周晓军1,杨辰龙1,莫锦秋2,刘晨曦1
(1.浙江大学现代制造工程研究所,杭州 310027; 2.上海交通大学机械与动力工程学院,上海 200240)
本文提出了一种用于多轴车辆测功试验台进行复杂路面模拟时,确定车辆各驱动轴所需施加行驶阻力的方法。本方法通过建立多轴车辆行驶的动力学模型,对车辆行驶中的相关状态量进行计算,进而获得测功机在模拟车辆行驶时所需施加的载荷。与一般方法相比,本方法能够更好地反映具有小坡度、短保持距离、坡度频繁变化等特点的复杂路面对车辆行驶状态的影响,从而使施加载荷更接近于车辆真实的行驶情况。同时通过统计方法将振动台架中使用的路面高程谱进行转换,生成用于本方法使用的测功台架复杂路面地形谱。最后对提出的车辆模型进行了仿真,对比分析了多轴车辆在水平路面和复杂路面上等速、加速、滑行和制动等行驶情况下车辆各个状态量的变化情况,仿真结果初步验证了方法的可行性。
多轴车辆;测功试验台;复杂路面;高程谱
前言
路面行驶模拟是车辆台架试验台的主要功能之一,它能模拟车辆在真实路面上的行驶状况,从而对车辆及其零部件的一些性能进行测试。通常车辆台架试验台分为两种类型:(1)振动试验台,通过采集到的路面载荷谱(振动信号或路面高程谱),利用液压缸加载,模拟车辆在路面行驶时的振动,测试车辆性能,也可进行关键零件的疲劳特性等试验[1];(2)测功试验台,通过电惯量模拟技术,利用测功电机对车辆各个驱动轴进行加载,模拟车辆的传动系统在特定路面地形下行驶时的受力情况,可进行整车系统特性等测试,如车辆百公里耗油量、车辆热平衡性能等试验[2]。
目前大多数多轴车辆测功试验台进行路面模拟时,模拟的路面往往较为简单,且多为水平路面。对于复杂路面的模拟方法,尚需要进一步的研究。文献[3]和文献[4]中对小型多轴独立驱动探路车在复杂路面行驶的模型及控制方法进行了研究,文献[5]中对履带车辆在复杂路面上的行驶适应性进行了研究。对于大功率多轴车辆,特别是应用于测功试验台的研究,国内较少,国外则多涉及军工项目,仍处于保密阶段。
对此本文中提出了一种用于测功试验台进行多轴车辆复杂路面行驶模拟时,确定车辆各个驱动轴的行驶阻力的方法,并给出了本方法使用的多轴车辆动力学模型。同时利用统计方法,将用于振动试验台的路面高程值加以转换,得到用于本方法的测功试验台复杂路面地形谱。
1 多轴车辆动力学模型
目前大多数多轴车辆测功试验台在建立多轴车辆行驶模型时,通常只考虑车辆前进方向(与地面平行)的运动,认为其他方向无运动,同时忽略车辆的俯仰和横摆运动。这样建立的多轴车辆行驶模型,只能模拟变化缓慢的地形,如长距离固定坡度,或变化缓慢的坡度;不能模拟坡度小、保持距离短和坡度变化频率高的复杂路面。为了解决这一问题,完成对上述复杂路面地形的模拟,则须对车辆模型进行重新的分析。
多轴车辆在上述复杂路面地形上行驶时,其车体的受力情况如图1所示。
考虑车体在X、Y方向上平移,有
∑Ficosβi+∑-Fckisinθ-Max=cosθFw
(1)
∑Fisinβi+∑Fckicosθ-May=Mg+sinθFw
(2)
(3)
Fw=CdAv2
(4)
式中:i=1,2,…,n;Fi为车体与各轴之间的相互作用力;Fcki为车体与各轴悬架系统间的相互作用力;βi为各轴车轮接触点的路面坡度角;ki为各轴悬架系统弹簧刚度系数;ci为各轴悬架系统阻尼系数;ski为各轴悬架系统弹簧长度;θ为车体仰角;M为车体质量;sk为悬架原始长度;Cd为风阻系数;A为车体迎风面积;v为车体平面运动速度;ax为水平方向加速度;ay为竖直方向加速度。
考虑车体绕车辆质心的俯仰运动,有
∑[(ski+hc)cos(θ-βi)+lckisin(βi-θ)]Fi+
(5)
式中:lcki为各轴距质心的水平距离;hc为车辆质心到车辆底盘的竖直距离;Iv为车辆俯仰方向的转动惯量。出于方向考虑,定义lcki可取正、负,质心到车头方向为正,质心到车尾方向为负。同时定义ski>0,sk>0,hc>0。
多轴车辆在上述复杂路面地形上行驶时,其各个轴的受力分析如图2所示。
各轴平移方程为
-Nisinβi+ficosβi-Ficosβi+Fckisinθ-
nimiawicosβi=0
(6)
Nicosβi+fisinβi-Fisinβi-Fckicosθ-
nimawisinβi=nimig
(7)
式中:Ni为各轴车轮受到的地面反作用力;fi为各轴车轮受到的滚动摩擦力;awi为各个轴心加速度;ni为各轴上的车轮数量;mi为各轴车轮质量。
各轴绕轴心的旋转运动方程为
(8)

各轴平移加速度和角加速度关系方程,认为各车轮与地面不产生滑转或滑移。
(9)
车体加速度和各轴加速度关系如图3所示,其表达式为

(10)
(11)
式中ψcki=arctan(hc/lcki),为车辆各轴悬架作用点的方向角,出于方向考虑,定义0<ψcki<π。
上述公式中,认为多轴车辆轴与轴之间存在轴间差速器,故各轴角速度ωi不同,且由于轴间差速器存在,可认为各个驱动轴受到的牵引力矩相等,受到的制动力矩则由车辆制动力矩分配系数bi决定。各从动轴受到牵引力为0,受到的制动力矩由车辆制动力矩分配系数bi决定,但测功试验台是对车辆驱动轴进行加载,所以模型应用于测功试验台时,可认为从动轴受到的制动力矩也为0。
式(1)~式(11)即为多轴车辆在复杂路面上的动力学模型,根据给定的车辆驱动情况和初始条件,通过模型计算,可获得任意时刻、任意距离时车辆的相关运动状态。
2 高程谱转换复杂路面地形谱方法
路面高程谱用来反映一段路面区域内的高低变化,可通过测量或转换的方法得到[6-7],如图4所示。
将路面高程谱,按车辆行进方向,每隔1m取点,按车辆宽度方向求平均,进而获得路面高度序列为
(12)
根据高度序列得到复杂路面坡度为
(13)
图5为由图4的路面高程谱得到的高度序列和路面坡度。
根据得到的路面坡度β(x)和已知的滚动阻力系数μ(x),两者共同组成复杂路面地形谱。
3 仿真分析
利用模型对某3轴车辆在简单路面和复杂路面行驶进行仿真分析,得到多轴车辆在等速、加速、空挡滑行和踏板制动(非紧急制动)情况下,车速、各轴转速和测功电机负载力矩的变化曲线,验证方法的可行性。由于测功试验台无法模拟多轴车辆紧急制动轴抱死的情况,故不考虑紧急制动情况。
该3轴车辆,轴1、轴3为驱动轴,轴2为从动轴。车辆制动力矩分配系数取0.5,即各驱动轴制动力矩相等。测功台架试验时只对轴1、轴3进行加载。被仿真车辆的主要参数如表1所示。
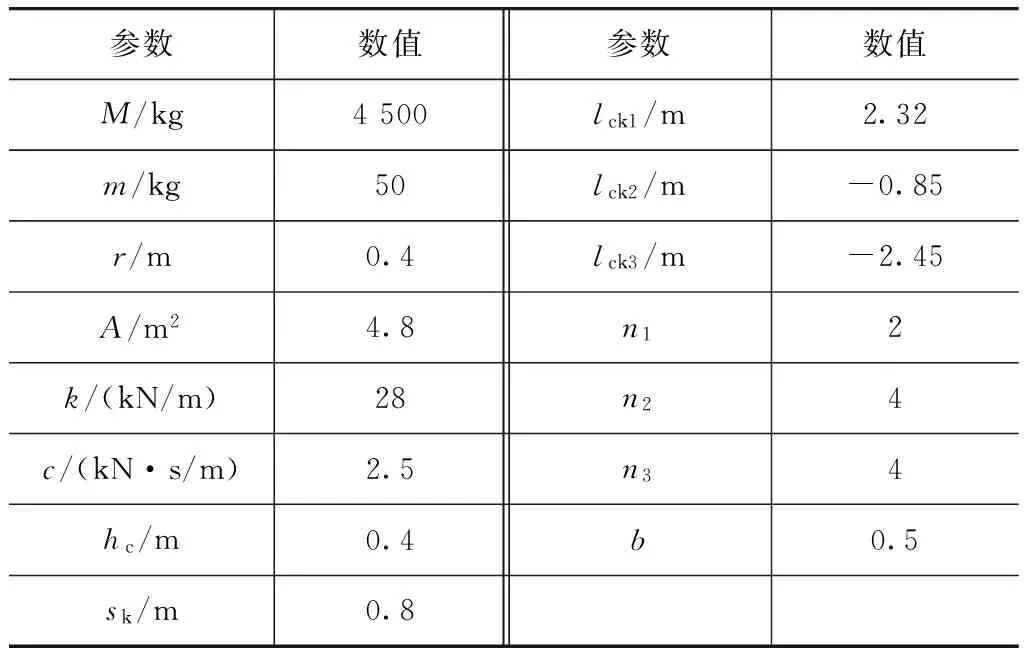
表1 多轴车辆参数
仿真时,被仿真车辆按照下面的方式进行运动。0≤t<5s和20s≤t<25s时,车辆处于等速运行阶段;5s≤t<10s时,车辆处于加速阶段;10s≤t<15s时,车辆处于空挡滑行阶段;15s≤t<20s时,车辆处于踏板制动阶段。其中t为仿真时间。仿真结果如图6和图7所示。
从图6(a)与图7(a)中可以看出:对于车体水平方向加速度,在两种路面上的基本变化趋势相同,但可看出有明显区别,可以体现出复杂路面对其的影响,水平方向车速则影响不大,与实际情况相符合;对于车体竖直方向加速度,在两种路面上有明显区别,但均在0附近振荡,竖直方向速度则略有不同,但也接近于0,与实际情况相符合。
从图6(b)与图7(b)中可以看出:对于车体俯仰角加速度,在两种路面上有明显区别,但均在0附近振荡;对于俯仰角,在水平路面上不同行驶状态下有不同的大小,但变化程度不大,在复杂路面上受路面影响,但总体变化范围不大。与实际情况相符。
从图6(c)与图7(c)中可以看出:无论在哪种路面上,各轴角加速度、转速和电机负载力矩几乎相等,故两图中各轴角加速度、转速和电机负载力矩曲线几乎重合;对于角加速度,在两种路面上的基本变化趋势相同,但可看出有明显区别,可以体现出复杂路面对其的影响,同时角加速度的变化决定着电惯量模拟时电机施加的惯性力的变化,进而决定着电机施加的负载变化;对于转速则影响不大。与实际情况相符合。
为进一步说明模拟复杂路面行驶时,路面复杂程度对电机负载力矩的影响。图8给出了不同复杂程度的路面上,电机负载与水平路面电机负载差值的变化情况。从图中可明显看出,路面越复杂,对电机负载力矩的影响越大。
4 结论
本文中提出了一种用于多轴车辆复杂路面行驶模拟时的车辆各个驱动轴行驶阻力模拟方法,并给出了具体多轴车辆动力学模型。同时利用统计方法,将路面高程谱转换成为测功试验台可用的复杂路面地形谱,扩大了路面高程谱的应用范围。相对于一般方法,本方法进行测功试验台路面模拟时,对复杂路面的适应性更好。通过仿真结果可知,车辆在复杂路面行驶时,通过模型计算出来的车辆各个状态量变化趋势均符合实际情况,且由复杂路面引
起的车辆加速度变化、各轴角加速度变化、电机负载力矩变化均受地面复杂程度影响,且均明显区别于车辆在水平路面行驶。本文中方法的可行性初步得到了验证,且为测功试验台进行车辆路面模拟时,测功机如何施加行驶阻力提供了新的理论思路。
[1] 王跃武.汽车零部件的道路模拟试验台理论与试验研究[D].沈阳:东北大学,2009.
[2] 张永刚.4×2汽车TCS测功机试验台研究[D].长春:吉林大学,2005.
[3] Alexander F Barral Silva, Auderi Vicente Santos, Marco Antonio Meggiolaro, et al. A Rough Terrain Traction Control Technique for All-Wheel-Drive Mobile Robots[J]. J. of the Braz. Soc. of Mech. Sci. & Eng,2010,32(4):489-501.
[4] Andreas Gibbesch, Bernd Schäfer. Multibody System Modelling and Simulation of Planetary Rover Mobility on Soft Terrain[C]. Proc. of the 8th International Symposium on Artifical Intelligence, Robotics and Automation in Space, Germany,2005.
[5] Zhou Yunbo, Wei Wei. Tracked Vehicle Compliance Simulation Research Based on Road Spectrum[C]. Artifical Intelligence, Management Science and Electronic Commerce(AIMSEC),2nd International Conference,2011:6056-6059.
[6] 罗竹辉,魏燕定,周晓军,等.随机激励三维路面空间域模型建模与仿真[J].振动与冲击,2012,31(21):68-72.
[7] 刘明学.GPS高程转换在公路高程控制测量中的应用研究[D].西安:长安大学,2012.
[8] 石锋.路谱台架试验研究[J].振动与冲击,2012,31(19):10-14.
[9] Huh K, Kim J, Hong J. Handling and Driving Characteristics for Six-Wheeled Vehicles[J]. Journal of Automobile Engineering,2000,214(159):159-170.
[10] Pierre Lamon, Roland Siegwart. Wheel Torque Control in Rough Terrain Modeling and Simulation[C]. International Conference on Robotics and Automation Barcelona, Spain,2005:867-872.
A Research on the Resistance Simulation Method forMulti-axle Vehicle Driving on Complex Road
Yang Yong1, Zhou Xiaojun1, Yang Chenlong1, Mo Jinqiu2& Liu Chenxi1
1.InstituteofAdvancedManufacturingEngineering,ZhejiangUniversity,Hangzhou310027;2.SchoolofMechanicalEngineering,ShanghaiJiaoTongUniversity,Shanghai200240
A method to determine the driving resistances to be loaded on driving axles of a multi-axle vehicle in complex road simulation on dynamometer test bench is proposed in this paper. By setting up a driving dynamics model for multi-axle vehicle, the method calculates the related state variables of driving vehicle and then determines the load to be applied during vehicle driving simulation on dynamometer. Compared with conventional methods, the method proposed can better reflect the effects of complex road with small, short distance and frequently changed slope on driving state of vehicle, and hence the loads applied are closer to the real driving situation of vehicle. In addition, by means of statistical method, the road elevation spectra adopted in vibration test bench are transformed into complex terrain spectra to be used in dynamometer test bench. Finally a simulation is performed on vehicle model to analyze the variations of state variables of multi-axle vehicle in different driving conditions of cruise, acceleration, coasting and braking on both level and complex roads. The results of simulation preliminarily verify the feasibility of the method proposed.
multi-axle vehicle; dynamometer test bench; complex road; elevation spectra
原稿收到日期为2013年8月14日,修改稿收到日期为2013年11月6日。
猜你喜欢
制造技术与机床(2018年12期)2018-12-23 02:41:02
山东青年(2016年12期)2017-03-02 18:22:48
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
工业设计(2016年7期)2016-05-04 04:02:44
探测与控制学报(2015年4期)2015-12-15 15:00:56
江西煤炭科技(2015年2期)2015-11-07 03:10:00
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
