基于人车路协同的车辆弯道安全车速预测*
2015-04-12 09:40:50赵树恩张金龙
汽车工程 2015年10期
赵树恩,屈 贤,张金龙
(1.重庆交通大学机电与汽车工程学院,重庆 400074; 2.重庆工程职业技术学院机械工程学院,重庆 402260;3.重庆大学汽车工程学院,重庆 400044)
2015206
基于人车路协同的车辆弯道安全车速预测*
赵树恩1,屈 贤2,张金龙3
(1.重庆交通大学机电与汽车工程学院,重庆 400074; 2.重庆工程职业技术学院机械工程学院,重庆 402260;3.重庆大学汽车工程学院,重庆 400044)
为保证车辆弯道行驶的安全,综合考虑影响车辆行驶安全的人、车、路和环境等因素,运用层次分析法和加权最小平方法建立多层次车辆弯道行驶安全度静态因素综合评价体系。基于车辆动力学理论分析车辆弯道行驶临界车速,通过引入安全系数k,将车辆弯道行驶安全度评价模型与临界车速结合,提出基于人车路协同的车辆弯道安全车速预测模型。仿真结果分析表明,该模型可预测车辆弯道行驶安全车速,为车辆弯道车速预警提供一种方法。
汽车安全;弯道;侧翻;安全车速;预测
前言
弯道是公路交通事故的多发路段。据统计,我国70%以上的重特大交通事故均发生在视距不良、路侧险要、技术指标较低的弯道路段[1]。车辆在弯道行驶时,往往会因为车速过高而发生侧翻、侧滑等危险状况。因此,如何准确预测车辆弯道行驶安全车速对减少此类事故的发生具有重要意义。
国内外学者对车辆行驶安全性的判别进行了大量研究,并取得了一些研究成果。文献[2]中综合考虑汽车运行的道路状况、车质量、质心高度等,开发了一种商用车弯道速度预警系统,并进行了实车路试,取得了较好的效果。文献[3]中在弯道安全车速计算时引入与驾驶员、轮胎特性和道路路面条件相关的影响因子,但其影响因子的取值存在局限性。文献[4]中在分析不同道路和气候条件对安全行驶车速影响的基础上,建立了多因素共同影响下的高速公路安全行驶车速模型,并对其进行仿真计算,但未考虑驾驶员生理心理特性对车速的影响。文献[5]中结合道路曲率、驾驶员特性和车辆动力学特性等参数建立了弯道最大安全车速预测模型,通过引入风险状态预估函数对车辆弯道行驶时的安全状态进行判断。上述研究大多未能全面考虑人、车、路和环境等因素及其相互作用对车辆行驶稳定性的影响,往往不能准确反映车辆实际运行状况。
本文中综合考虑影响车辆行驶安全的人、车、路和环境等因素,运用层次分析法和加权最小平方法建立多层次车辆弯道行驶安全度静态因素综合评价体系,并结合车辆动力学理论,建立基于人-车-路协同的车辆弯道行驶安全车速预测模型,通过与基于车辆动力学理论的计算车速和基于TruckSim软件的仿真车速进行比较,验证了该车速预测模型的有效性。
1.1 车辆弯道行驶安全度评价指标
人、车、路和环境是影响车辆行驶安全度的4个主要因素。它们之间构成了既相互关联又相互制约的交通安全复杂大系统[6]。考虑到影响因素的不确定性和复杂性,建立多层次车辆弯道行驶安全度综合评价指标,如表1所示,各评价指标相对应的量化值见表2。
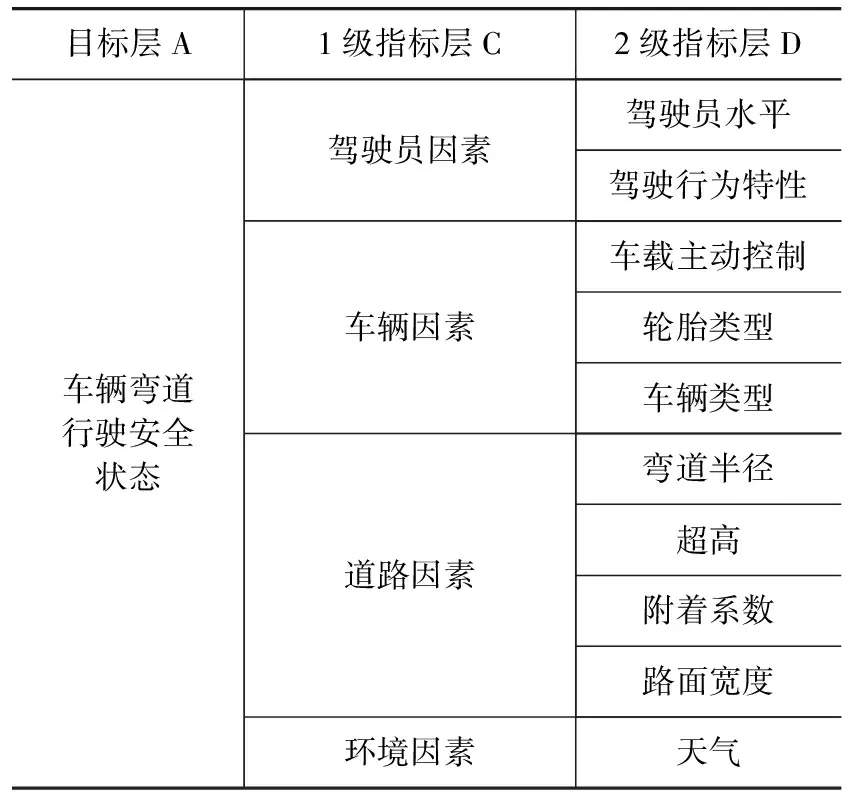
表1 车辆弯道行驶安全度综合评价体系
1.2 基于加权最小平方法的综合评价模型
1.2.1 综合评价模型
“人-车-路-环境”是决定车辆行驶安全的最基本要素。它们对车辆行驶安全度的影响是相互独立的。采用线性模型[9]对其进行综合评价,则
(1)
1.2.2 权重系数的确定
加权最小平方法[10]是对判断矩阵(非一致矩阵)A=(aij)在约束条件∑ωi=1,ωi>0下,用函数
(2)
的极小化解ωθ=[ω1ω2ω3…ωm]T作为排序权向量。构造拉格朗日函数L(ω,λ)为
(3)
令∂L/∂ωL=0,整理可得
(4)
其中,i=1,2,3,…,k,…,n。矩阵形式为
Aωθ+λωθ=0
(5)
由于eTωθ=1,则式(5)整理可得
ωθ=C-1e/eTC-1e
(6)
由式(6)即可求得影响车辆行驶安全度各因素的权重。其中
(7)
判断矩阵(非一致矩阵)A=(aij),采用文献[11]中提出的“1-9标度法”来构造,其判别标准如表3所示。
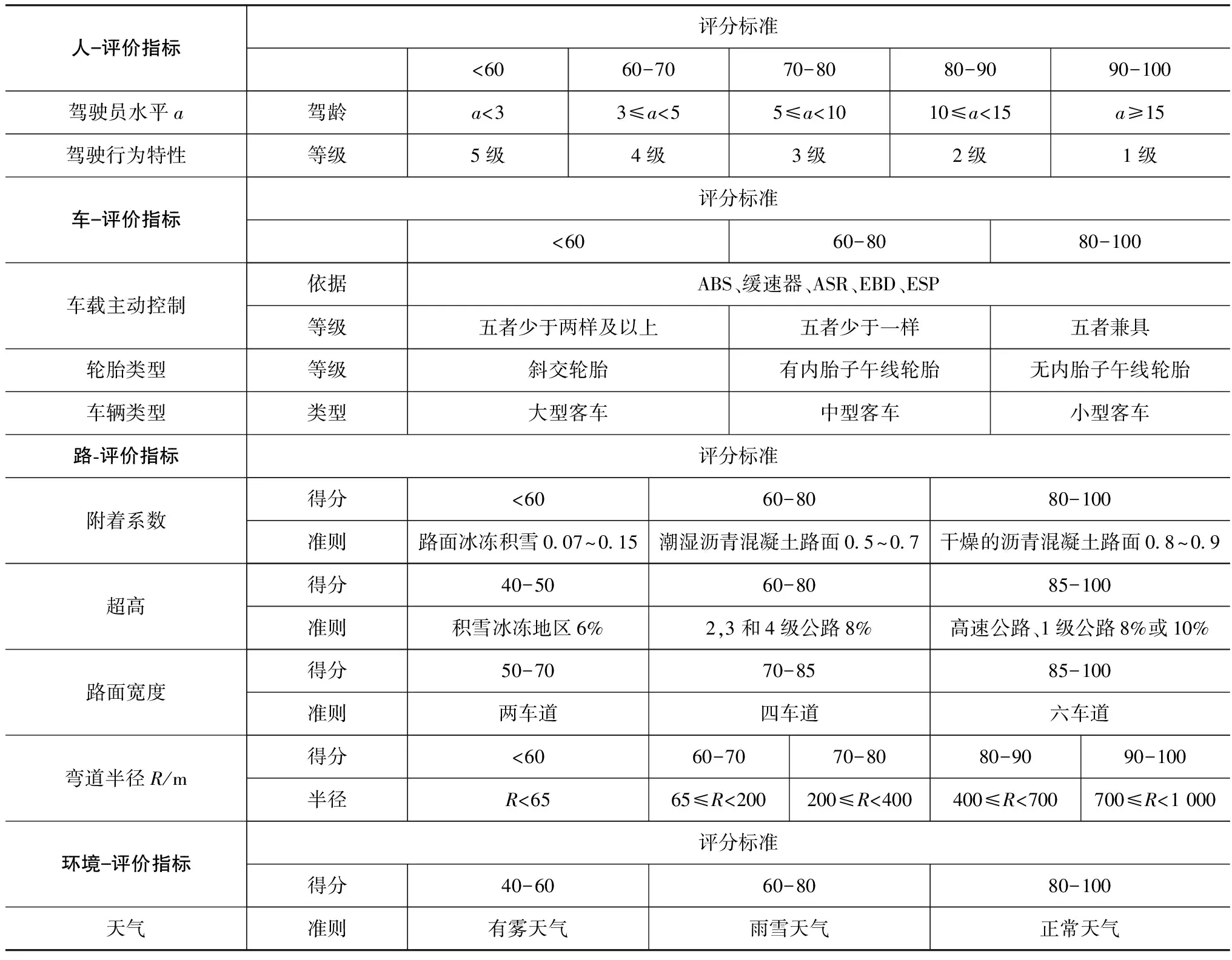
表2 评价指标的量化值
注:依据症状自评量表SCL90[7]将驾驶员行为特性分为5个等级,1级代表驾驶员没有焦虑、疲劳症状,2级表示症状不明显,3级表示症状为轻到中度,4级表示症状为中到严重,5级表示症状的频度和强度都十分严重。对于环境因素,如果是在夜间,以上得分乘以0.8的系数[8]。
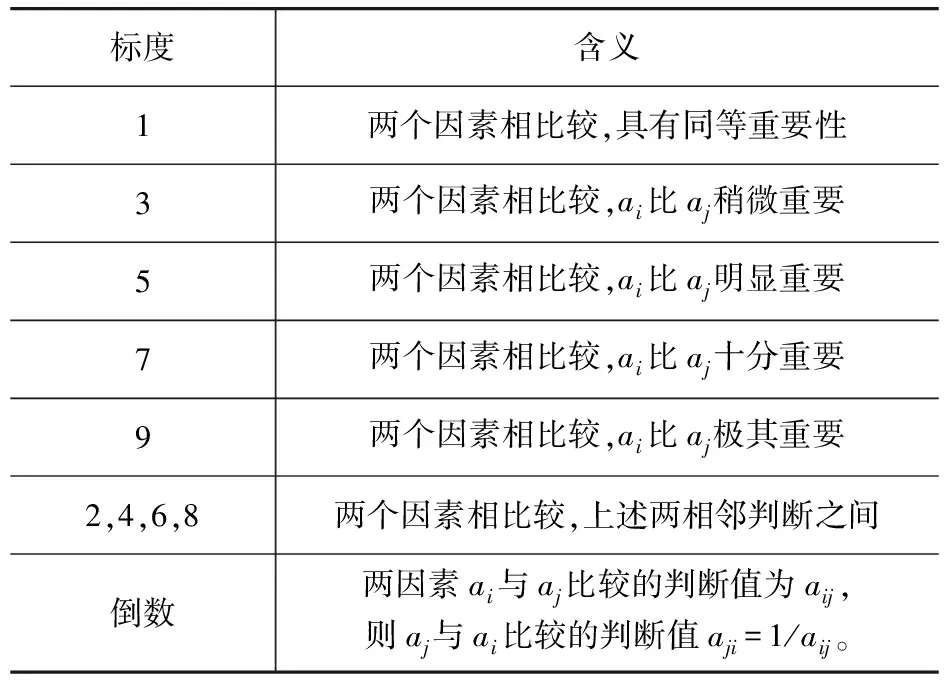
表3 “1-9”评判标度准则
以影响行车安全的人、车、路和环境4个因素作为一级指标层评判因子,采用加权最小平方法对各影响因素进行权重分配。根据表3,对指标重要性两两比较,得判断矩阵
利用式(7)求出矩阵C及其逆矩阵为
eTC-1e=10.17
所以C-1e=C-1[1111]T=[5.403.290.990.50]T,则基于加权最小平方法的1级指标层各影响因素权重分配为ωθ=C-1e/eTC-1e=[0.5310.3230.0970.049]T
同理,2级指标层评价指标权重分配也可通过上述步骤计算得到,计算结果如表4所示。
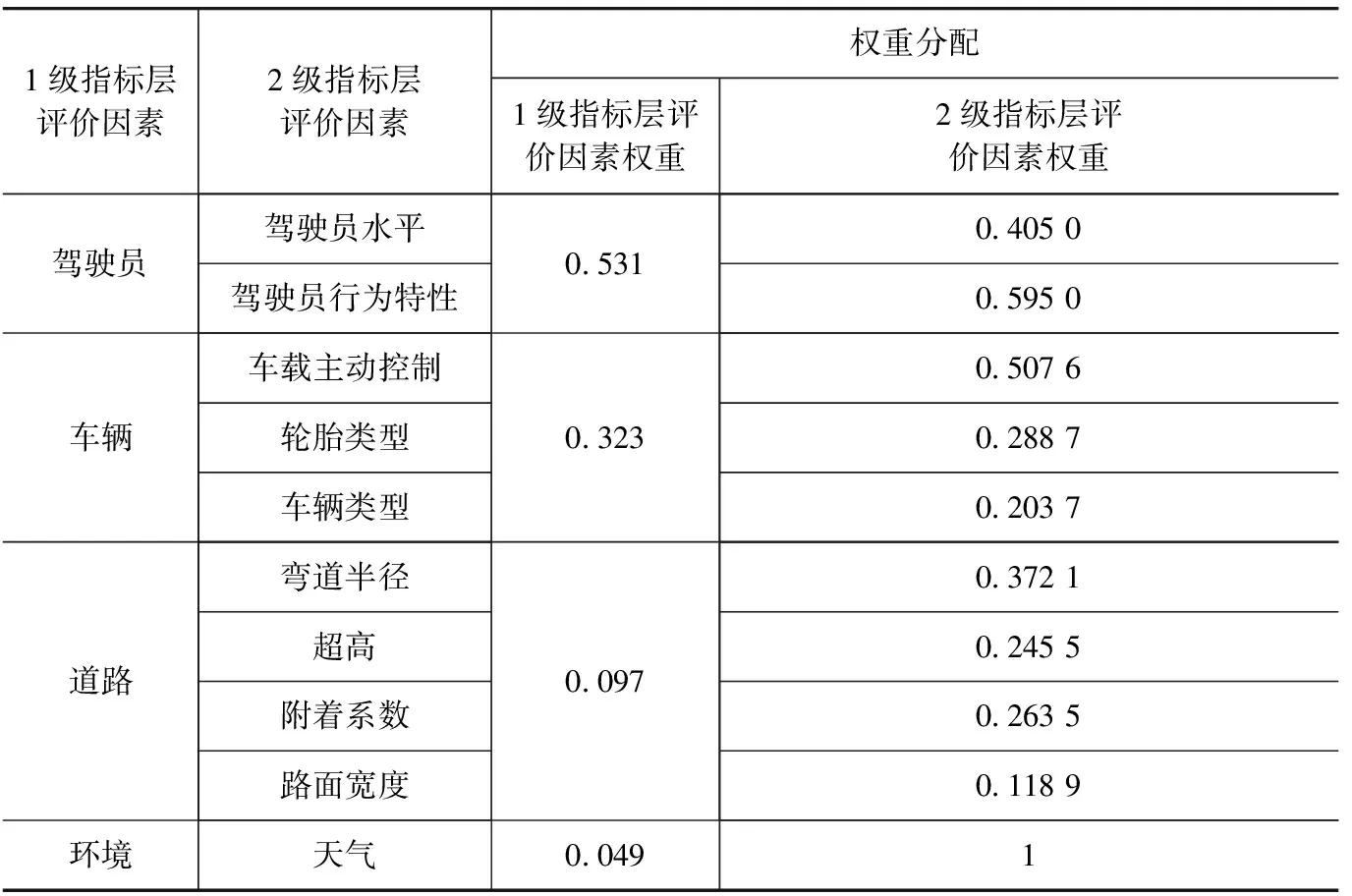
表4 各指标因素权重分配
结合式(1),则运用加权最小平方法构建的车辆行驶安全度综合评价模型为
y=0.531x1+0.323x2+0.097x3+0.049x4
(8)
式中:x1~x4分别为驾驶员、车辆、道路和环境等影响因素的量化值。
1.2.3 子评价模型的确定
结合以上分析,各子系统评价模型如表5所示。
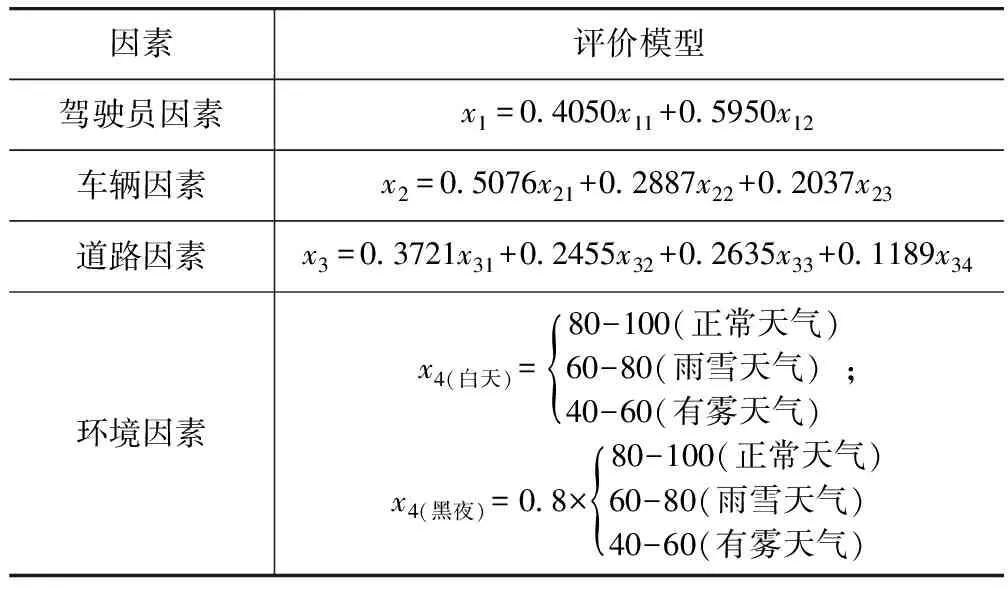
表5 子系统评价模型
表5中的x1i,x2j,x3n分别为表2中人(驾驶员)、车和路等评价指标对应的量化值;i=1,2,分别代表“驾驶员水平”和“驾驶行为特性”;同理,j=1,2,3分别代表车载主动控制、轮胎类型和车辆类型;n=1,2,3,4分别代表弯道半径、超高、附着系数和路面宽度。
2 基于车辆动力学的弯道行驶临界车速
2.1 车辆侧翻力学模型
为准确预测车辆弯道安全车速,建立考虑悬架作用的车辆侧翻力学模型,如图1所示。该模型忽略了汽车纵向和俯仰方向的运动,并假设汽车左右车轮关于x轴对称[12],忽略非簧载质量和前后轴不同特性对汽车侧翻特性的影响。
车辆在坡道上行驶时,沿y轴的力平衡方程为
Fy1cosθb+Fz1sinθb-may=0
(9)
沿z轴的力平衡方程为
Fy1sinθb+Fz1cosθb-mg=0
(10)
绕x轴的力矩平衡方程为
maydcosθs+mgdsinθs-Kθθ=0
(11)
由图1可见,θs=θ-θb
代入式(11)可得
maydcos(θ-θb)+mgdsin(θ-θb)-Kθθ=0
(12)
再由图1可见
d=(HC-HO)/cosθ
(13)
假设侧倾角较小,则式(12)近似为
Kθθ≈mayd+mgd(θ-θb)
(14)
即
θ/[(ay/g)-θb]≈mgd/(Kθ-mgd)
(15)
而式(13)近似为
d≈HC-HO
(16)
式(15)中簧载质量侧倾角和侧倾角速度的比值通常被称为车辆侧倾增益[12],故侧倾增益为
(17)
式中:m为簧载质量;HC为车辆簧载质量质心高度;HO为侧倾中心的高度;d为簧载质量质心C相对于侧倾中心O的高度;t为轮距;θ为侧倾角;Kθ为侧倾刚度;θb为横坡度角;θs为质心与侧倾中心连线与铅垂线的夹角;Fy1和Fz1分别表示侧倾中心O处的侧倾载荷和垂直载荷。
2.2 侧翻极限工况下的车速计算
如图1所示,车辆绕右侧轮胎接地点侧倾,则
Kθθ+Fy1·HO-Fz1t/2+N1t=0
(18)
式中N1为左侧轮胎垂直载荷。
由于道路横坡度角较小,用横坡度值代替坡度角,tanθ=θb,则式(9)和式(10)可简化为
Fy1=may-mgθb
(19)
Fz1=mg+mayθb
(20)
当车辆内侧轮胎离地时,内侧轮胎的垂向载荷为0,可得
Kθθmax=(mgθb-maymax)HO+(mg+maymaxθb)t/2
(21)
式中:θmax为在带有横坡度角的车辆侧倾角最大值;aymax为车辆侧向加速度最大值。
将式(14)和式(16)代入式(21),可得
maymax(HC-HO)+mg(HC-HO)(θmax-θb)=
-(maymax-mgθb)HO+(mg+maymax)t/2
(22)
将式(17)代入式(22),可得
(HC-HO)aymax/g+(HC-HO)[(aymax/g-θb)Rφ-θb]=
-(aymax/g-θb)HO+(1+θbaymax/g)t/2
(23)
化简可得
(24)
考虑到测量的方便性和可操作性,简化aymax,取HC=HO,则得
(25)
根据侧向加速度、转弯半径和速度之间的关系,即
ay=v2/R
(26)
则车辆在带横坡路面转弯行驶时的侧翻临界车速为
(27)
2.3 侧滑极限工况下的车速计算
随着车速v的增加,离心惯性力迅速增加,当它达到轮胎与路面间横向最大附着力Fy时,车辆将发生侧滑,则
Fy=(N1+N2)φy
(28)
又因为
Fz1=N1+N2
(29)
将式(20)代入式(28),整理可得
Fy=(mg+mayθb)φy
(30)
当侧倾载荷Fy1等于横向最大附着力Fy时,为车辆发生侧滑的临界状态,结合式(26),可得侧滑临界车速为
(31)
结合式(27)和式(31),则基于车辆动力学的车辆弯道行驶临界车速模型为
(32)
3 基于人车路协同的安全车速预测模型
基于车辆动力学的车辆弯道临界车速是在一般情况下的极限车速。而道路交通系统是复杂的大系统,受驾驶员、车辆、道路和环境等因素的综合影响。因此,在基于车辆动力学的行驶临界车速模型基础上,引入安全系数k。它反映了车辆行驶安全度静态综合因素,从而实现车辆行驶安全度静、动态影响因素的协同与耦合。安全系数k是运用SAS软件进行逐步回归分析[13],具体操作步骤:(1)制作变量间的散点图,寻求变量间的相关性;(2)确定变量间可能的函数形式;(3)对变量进行回归分析,确定回归方程。经过大量的计算机模拟验算和验证得出安全系数k为
(33)
式中y为由式(8)得出的车辆安全度综合评价值。
另外,考虑到汽车在受到侧向力作用时,外侧轮胎产生弹性变形,从而轮胎接地中心向内偏移,轮距减小,这导致安全临界车速减少约5%[14]。因此,引入轮胎侧偏特性修正系数K,K取0.95。
结合式(32)、式(33)和轮胎侧偏特性修正系数K,基于人车路协同的车辆弯道行驶安全车速预测模型为
(34)
4 仿真验证
本文中选取某大客车为对象,运用TruckSim仿真软件对车辆安全临界车速进行仿真分析[15-16]。设定仿真环境为天气晴朗,路面干燥;驾驶员驾龄7年,驾驶技术娴熟且身体健康;客车各装备齐全,采用子午线轮胎;平坦沥青路面,双车道,行驶道路弯多。大客车和道路的主要参数如表6所示。
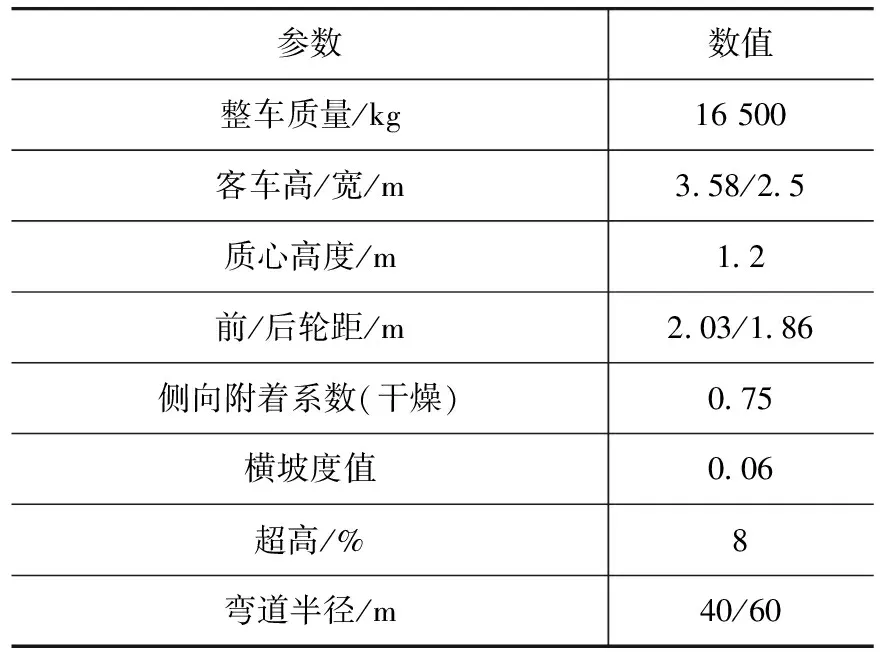
表6 道路和客车的主要参数
通过TruckSim构建由2条200m直道和2个半径不相同的弯道组成的干燥沥青路面环形跑道,其中弯道半径分别为40和60m。图2和图3分别为基于TruckSim软件,大客车在直道200m、弯道半径分别为40和60m的环形跑道上的仿真行驶状态。
由图2和图3可以看出,在弯道半径为40和60m的环形跑道上,速度匀速变化的大客车在通过弯道时车辆发生侧偏、侧翻的过程,车辆发生侧偏时的速度即为仿真得到的车辆临界车速。图4为车辆行驶轨迹图。
从图4可以看出,车辆在直道行驶时行驶轨迹与中心车道线重合;车辆驶入弯道时,行驶轨迹相对于中心车道线先向左偏移,后又向右偏移。
图5和图6分别为弯道半径为40和60m的车辆侧倾角与车辆横向行驶轨迹对比图。
从图5和图6可以看出,汽车进入弯道时,车辆侧倾角快速增加,车辆严重偏离轨道线行驶,直至汽车发生侧翻。
图7和图8分别为弯道半径为40和60m的车辆行驶速度变化与车轮垂直载荷变化。
由图7和图8可以看出,直线行驶时车速几乎呈线性增加,轮胎的垂向力基本保持小范围波动;进入弯道后,随车速的下降,轮胎右侧垂向力增加,左侧垂向力下降,直至为0,则汽车在弯道处发生侧翻。
图9为车辆横向载荷转移率。车辆横向载荷转移率(LTR)[17]是指内侧车轮转移到外侧车轮的载荷与总载荷之比;当LTR>1时,车辆会发生侧翻。由图9可以看出,汽车LTR呈准线性增加到1,此时车辆发生侧翻。
同理,也可得到车辆在弯道湿滑路面行驶时的安全车速。
表7为基于TruckSim软件仿真得到的车辆弯道横向失稳临界车速、基于车辆动力学理论模型(式(32))的计算车速和本文中所建立的基于人车路协同的安全车速预测模型(式(34))得到的弯道安全车速的对比。
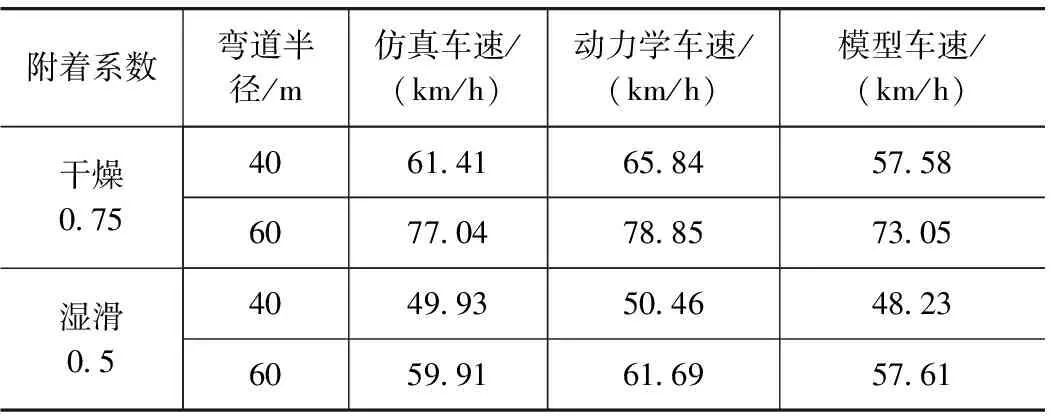
表7 车辆弯道安全车速比较
由表7可知,相对基于车辆动力学的安全车速模型而言,本文中建立的基于人车路协同的车辆弯道安全车速预测模型,充分考虑了人、车、路和环境对车辆行驶安全的影响,可确定不同条件下的临界车速;所确定的临界车速相对保守,但更接近TruckSim仿真得到的临界车速,这验证了该模型的可行性。
5 结论
(1) 综合考虑影响车辆行驶安全的人、车、路和环境等因素,建立了车辆行驶安全度静态综合因素评价体系,构建了基于加权最小平方法的车辆行驶安全度模型。
(2) 在由车辆动力学导出车辆弯道行驶临界车速模型的基础上,引入安全系数k和轮胎侧偏特性修正系数,给出了基于人车路协同的车辆弯道行驶安全车速预测模型。
(3) 通过对比验证表明,该模型可准确预测不同条件下的安全车速,对车辆弯道行驶安全研究具有理论价值。
[1] 蒋工亮,吕佳,杨丽改,等.高速公路车辆安全行驶速度仿真识别系统[J].交通运输工程学报,2010,10(4):121-126.
[2] Xiao Yunlu. Development of Speed Advisory for Commercial Vehicles Based on Environmental Conditions[C]. Proc. 15thITS World Congress, Nov. 16-20,2008:50-51.
[3] Lee Yong H, Deng Weiwei. Speed Control Method for Vehicle Approaching and Traveling on a Curve[P]. US Patent,2007-06-28.
[4] 金鑫君.基于多因素影响的高速公路安全行驶速度研究[D].重庆:重庆交通大学,2010.
[5] 张德兆,王建强,李升波,等.基于风险状态预估的弯道防侧滑超速预警系统[J].公路交通科技,2009,26(S1):44-48.
[6] Abut H, Hansen J, Takeda K. DSP for in Vehicle and Mobile Systems [M].USA. Springer,2005.
[7] Amditis A, Pagle K, Joshi S. Driver-vehicle-environment Monitoring for On-board Driver Support Systems: Lessons Learned from Design and Implementation[J]. Applied Ergonomics,2010,41(2):225-235.
[8] 张广祥.基于驾驶行为的汽车主动防撞预警系统的安全车距研究[D].长春:吉林大学,2011.
[9] 田晶晶,李世武,孙文财,等.基于车路协同的动态车辆安全状态评价模型[J].哈尔滨工业大学学报,2012,44(4):131-135.
[10] 赵树恩,屈贤,李玉玲,等.基于权的最小平方法的山区道路交通安全度模糊综合评价[J].数学的实践与认识,2014,44(13):87-93.
[11] 杜栋,庞庆华.现代综合评价方法与案例精选[M].北京:清华大学出版社,2008.
[12] 余贵珍,李芹.车辆弯道行驶侧倾稳定性分析与侧翻预警研究[J].北京工业大学学报,2014,40(4):574-579.
[13] 宋马良.基于单目视觉的弯道行车预警研究[D].昆明:昆明理工大学,2013.
[14] 余志生.汽车理论[M].北京:机械工业出版社,2009.
[15] 冯力.回归分析方法原理[M].北京:中国金融出版社,2004.
[16] Nakaoka M, Pongsathorn R, Nagai M. Study on Forward Collision Warning System Adapted to Driver Characteristics and Road Environment[C]. International Conference Control, Automation and Systems 2008,in COEX.Seoul,2008:2890-2895.
[17] 沈明.基于仿真分析的汽车侧翻风险研究[J].汽车工程,2009,31(12):1173-1175.
Prediction of Safe Vehicle Speed on Curved RoadsBased on Driver-Vehicle-Road Collaboration
Zhao Shuen1, Qu Xian2& Zhang Jinlong3
1.CollegeofMechanical&AutomobileEngineering,ChongqingJiaoTongUniversity,Chongqing400074;2.CollegeofMechanicalEngineering,ChongqingVocationalInstituteofEngineering,Chongqing402260;3.CollegeofAutomobileEngineering,ChongqingUniversity,Chongqing400044
For assuring vehicle driving safety on curved roads, with concurrent considerations of driver, vehicle, road and environment factors, a multi-layer static comprehensive evaluation system for vehicle driving safety on cured road is established by using AHP and weighted least squares method. The critical driving speed of vehicle on curved road is analyzed based on vehicle dynamics theory and by introducing safety coefficient k and combing the evaluation model for vehicle driving safety on cured road with critical vehicle speed, a prediction model for safe vehicle speed on cured road is proposed based on driver-vehicle-road collaboration. Simulation results show that the prediction model proposed can predict the safe driving speed of vehicle on cured road, providing a way of vehicle speed early warning on curve roads.
vehicle safety; curved roads; rollover; safe speed; prediction
*国家自然科学基金(51278514)、重庆市科委科研项目(cstc2014jcyjA6007)、山地城市交通系统与安全重庆市重点实验室开放基金(KTSS201305)和国家博士后基金(2014M562259)资助。
原稿收到日期为2015年7月2日,修改稿收到日期为2015年8月12日。
猜你喜欢
童话世界(2019年14期)2019-06-25 10:11:52
汽车观察(2019年2期)2019-03-15 05:59:54
汽车维护与修理(2018年1期)2018-04-04 01:13:22
中国交通信息化(2018年12期)2018-03-21 05:52:32
幼儿教育·父母孩子版(2017年12期)2018-02-28 16:33:59
橡胶工业(2015年4期)2015-07-29 09:17:24
橡胶工业(2015年4期)2015-07-29 09:17:02
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
警察技术(2013年1期)2013-03-20 14:11:16