
基于ADAMS 的变位机虚拟样机动力学仿真分析
2015-04-09 12:36唐艳华赵永生
重型机械 2015年6期
唐艳华,赵永生
(1.燕山大学河北省并联机器人与机电系统实验室,河北 秦皇岛 066004;2.燕山大学先进锻压成型技术与科学教育部重点实验室,河北 秦皇岛 066004)
0 前言
变位机是将工件回转并倾斜,使工件置于有利加工位置的变位机械,主要用于机架、机座、机壳、法兰、封头等非长形焊件的翻转变位,也可以在其上从事切割、堆焊、喷涂等作业[1]。在重型机械切削加工过程中,工件质量大,形状不规则,且包含个数、位置、尺寸均不相同的待加工孔,需要在变位机上完成装夹定位[2]。由于在工作过程中,变位机需要通过旋转和翻转将水平放置的工件摆放到工件的加工位置,而工件在变位机上的装夹位置并不确定,旋转、翻转亦没有固定的顺序,因此变位机承受的载荷并不固定,它随着工件以及工作位置的不同而变化。
1 变位机结构组成
应某公司设计要求:工件最大质量60 t,变位机工作台直径5000 mm,夹持工件最大直径4500 mm,工作平台翻转角度范围0~70°,工作平台自身旋转角度范围0~360°,自行设计开发两自由度变位机,其三维实体简化模型如图1所示。
该变位机具有旋转和翻转两个自由度,主要由旋转工作台、翻转架和底座三大部分组成,翻转机构由两个液压马达同时驱动,通过滑动丝杠带动丝母在其轴线方向上移动,以实现翻转架的翻转运动。翻转架的上部通过外齿圈交叉滚子转盘轴承与旋转工作台连接,且为旋转夹紧机构的支座;下部(即腿部)与丝母固连。变位机的翻转机构主体通过翻转轴放置在变位机基座上。
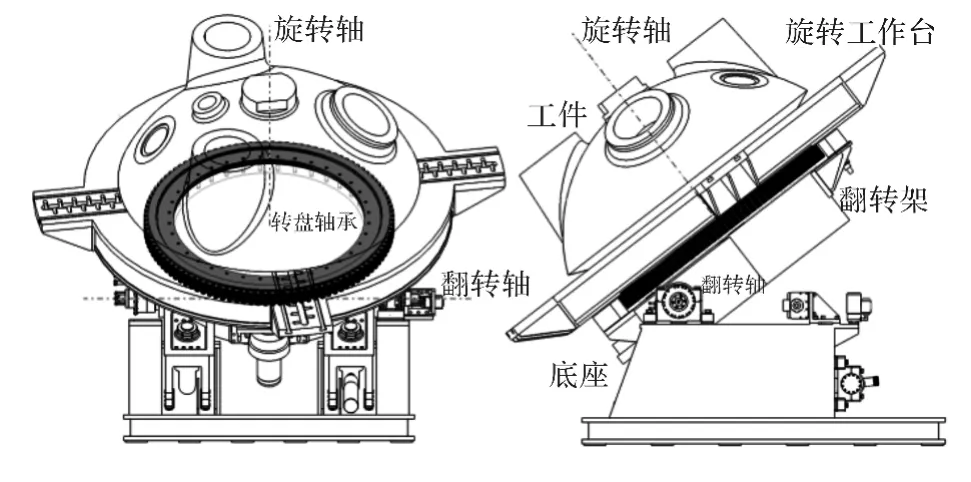
图1 重型变位机三维实体简化模型Fig.1 3D solid model of heavy positioner
2 变位机ADAMS 模型建立
采用MSC 公司的ADAMS 仿真分析软件,其采用多刚体系统动力学理论,采用拉格朗日方程方法来建立系统动力学方程,可以对虚拟机械系统进行静力学、动力学、运动学分析,并输出位移、速度、加速度、作用力曲线[5-6]。
利用ADAMS 与Solidworks 的接口,首先在Solidworks 中按照变位机的实际结构尺寸建立变位机的三维实体模型,然后将三维实体模型导入到ADAMS/View 中。导入模型后,需要重新定义各个部件的材质等质量参数,以及在具有相对运动的部件间建立运动副,并添加相应的驱动。两自由度变位机的ADAMS 实体模型如图2所示。
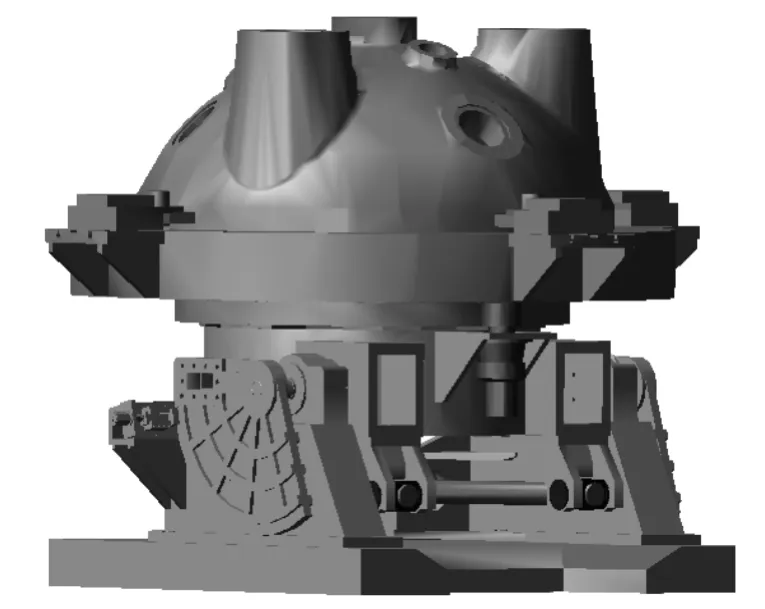
图2 变位机ADAMS 模型Fig.2 ADAMS model of positioner
在底座与大地之间建立固定副,将变位机的底座固定;在翻转驱动部件和翻转驱动丝杠之间添加一个转动副;丝杠螺母机构之间建立一个螺距为8 mm 的旋副,同时定义一个与螺旋副同方向的圆柱副;变位机旋转工作台旋转驱动部件和旋转部件之间添加一个齿轮副;为了使模型更接近现实,在运动副上施加一定的摩擦力。
3 变位机翻转运动仿真
设定ADAMS/View 中的参数如下:翻转驱动电机转速12 r/min;旋转驱动电机转速0 r/min;仿真时间1580 s;系统中引入重力加速度。仿真得到变位机翻转角速度随时间的变化曲线如图3a 所示。
给定变位机结构参数,在Matlab 中编程计算得到翻转角速度变化曲线如图3b 所示。
从图3 可以看出,计算所得的变位机翻转角速度曲线与仿真所得的翻转角速度的变化曲线几乎一致,这说明建立的仿真模型是准确的。
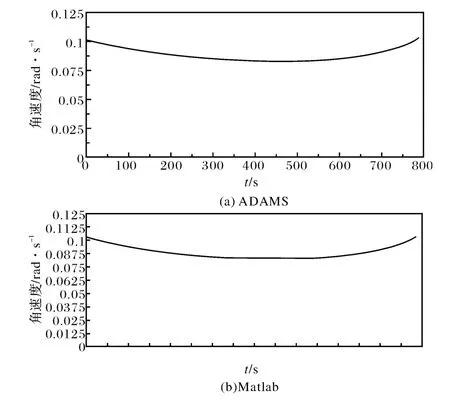
图3 变位机翻转角速度随时间的变化曲线Fig.3 Turnover angular velocity versus time curve of positioner
根据变位机翻转运动中的位置和丝杆所受轴向力的方向,将丝杠螺母机构的受力状态分为四种情况:分别是变位机翻起丝杆受拉阶段、变位机翻起丝杆受压阶段、变位机回位运动中丝杆受压阶段和变位机回位运动中丝杆受拉阶段。
分析计算四种情况下丝杠的效率,由于变位机的各个关节所加的摩擦力转化到驱动电机沿电机轴向的力矩是线性叠加的关系,可以把计算出来的丝杠效率叠加到旋转电机的输出扭矩上,得到如图4 所示的翻转驱动旋转电机的输出力矩曲线,通过曲线上所标出的电机最大输出力矩,用于指导选择翻转驱动电机。
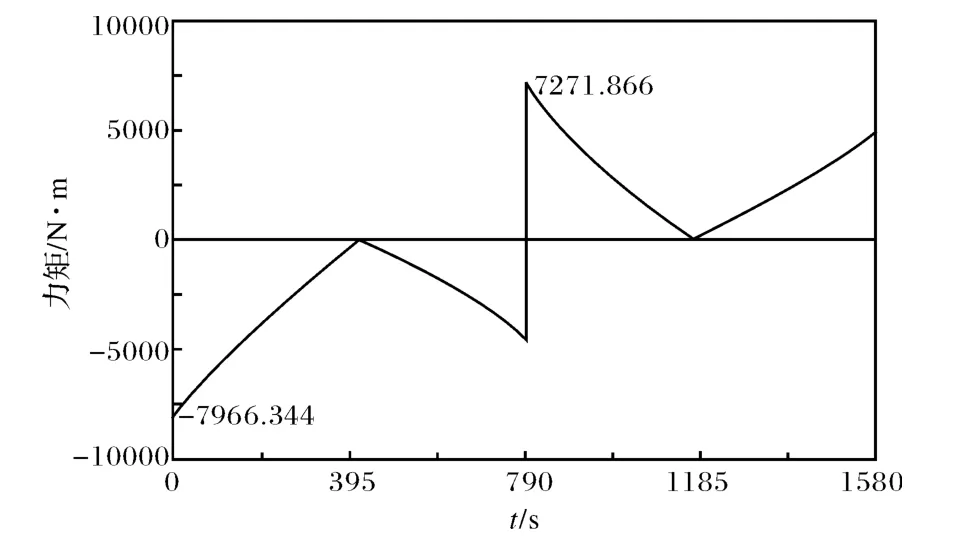
图4 变位机翻转运动驱动电机扭矩曲线Fig.4 Drive motor torque curve during positioner rotation
4 变位机旋转运动仿真分析
变位机的运动过程:变位机的旋转工作台在翻转70°位置,工作台恒速旋转一周。在实际的工作情况下,在电机减速器之间、齿轮之间和转盘轴承的滚动体与内外圈之间存在摩擦力。因此,需要在电机减速器和转盘轴承定义的两个转动副处定义摩擦力。
转盘轴承的摩擦系数在0.01~0.015 之间,启动时为0.015,正常运转时为0.01。本文给出了启动(实线)和正常运转(虚线)条件下的结果如图5 所示,两条曲线其差值超过4000 N·m。(取直齿轮的传动效率为0.95)。
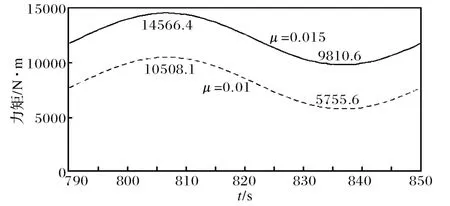
图5 考虑摩擦力时在70°位置旋转一周电机输出力矩曲线Fig.5 Output torque curve of motor at 70°position with friction for each rotation
转盘轴承的摩擦系数取0.015 时,工作台旋转360°过程中电机的最大功率为14.5 kW,此时电机的输出转速为10 r/min,如果转速提高则电机的功率会相应的成比例提高。
5 变位机切削运动仿真分析
在铣削过程中假设刀具的运动轨迹为圆,运动一周的时间为60 s。将切削力[3]简化到如图6所示的坐标系的原点,以时间为变量表示的切削力在三个方向上的分量为:
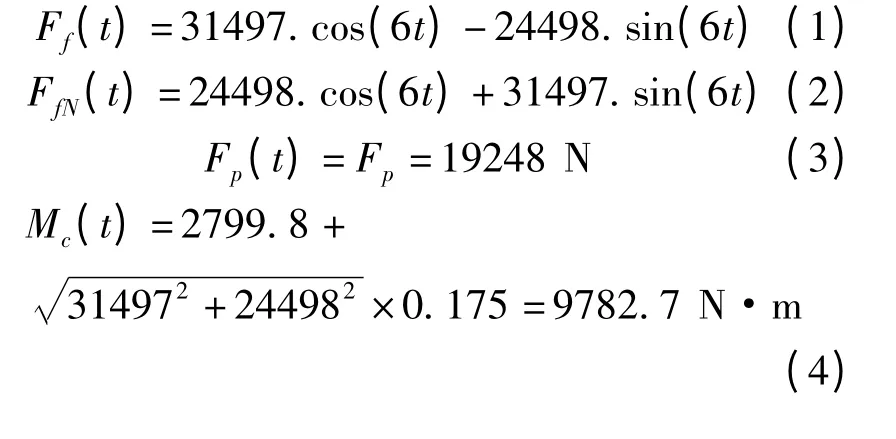
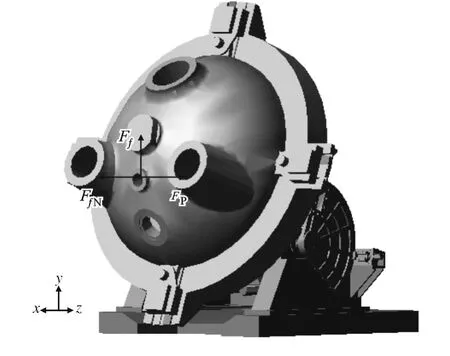
图6 切削力加载示意图ig.6 Loading cutting force model in ADAMS
在图7 所示的位置加载切削力,为了平衡工件的重力和切削力对变位机的影响,需要测量相应的翻转锁紧力矩和旋转锁紧力矩。设定仿真时间为120 s,变位机的锁紧力矩变化曲线如图7所示。其中,最大翻转锁紧力矩为1.03E +006 N·m,最大旋转锁紧力矩为47945 N·m。该翻转锁紧力矩和旋转锁紧力矩可以作为设计锁紧装置的参考标准,从而缩短设计周期。
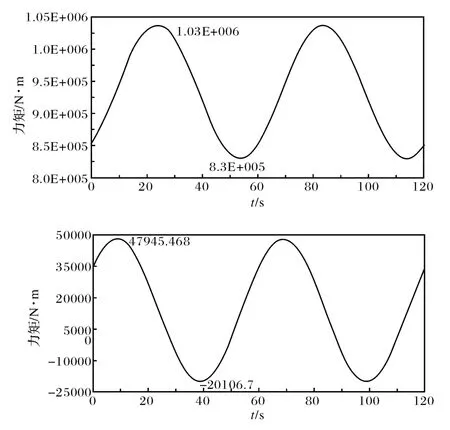
图7 切削加工仿真测得锁紧力矩曲线Fig.7 Locking torque curve during machining simulation
6 结论
通过ADAMS 动力学仿真分析,确定了变位机翻转驱动电机的驱动扭矩,及切削加工过程中锁紧装置需要施加的锁紧力矩,该结果可以很好地指导变位机几何结构的设计。在变位机设计初期,充分利用虚拟样机运动仿真技术,能够极大地提高对变位机设计中可能存在问题(例如干涉问题)的预见性,从而更加科学、合理、快速地完成设计工作。
[1]唐艳华,赵云峰,祁荣先,等.变位机用转盘轴承的载荷分析与仿真[J].机械设计,2011,28(5):10-14.
[2]Yanhua Tang,Yongsheng Zhao.Mechanism Design of a Two DOF Heavy Positioner and Turns-over Structure.Applied Mechanics and Materials[J].2013,271(1):1017-1021 .
[3]唐艳华,赵永生.变位机用转盘轴承的谐响应分析[J].机械设计与制造,2013(7):175-177.
[4]苏玉珍,邹明山,李平.基于ADAMS 的某拼接式熨平板振动特性仿真分析.机床与液压,2014,42(13):157-161.
[5]陈乐生,王以伦.多刚体动力学基础[M].哈尔滨:哈尔滨工程大学出版社,1995.
[6]陈立平,张云清.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[7]林义忠,欧爽翔.六自由度焊接机器人本体结构设计及动力学仿真[J].机械设计与制造,2014(6):21-27.
[8]周杰,马吉胜,孙中兴,等.某型兵器发射塔架摆杆系统机液耦合动力学仿真研究[J].机床与液压,2014,42(7):141-147.
猜你喜欢
制造技术与机床(2019年11期)2019-12-04
润滑与密封(2019年8期)2019-08-27
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年7期)2019-07-22
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年8期)2017-11-27
现代交际(2017年19期)2017-10-23
制造技术与机床(2017年2期)2017-05-04
