基于多智能体系统的微电网分散协调控制策略
2015-04-06 06:19窦春霞徐晓龙
电工技术学报 2015年7期
窦春霞 李 娜 徐晓龙
(燕山大学电气工程学院 秦皇岛 066004)
基于多智能体系统的微电网分散协调控制策略
窦春霞 李 娜 徐晓龙
(燕山大学电气工程学院 秦皇岛 066004)
针对微电网在外界干扰情况下的动态稳定性问题,提出了基于多智能体系统的微电网分散协调控制策略。多智能体系统构建为两层,在下层智能体中,各分布式发电单元的分散控制设计为双环就地控制器,即由基于下垂特性的外环功率控制器和基于分数阶PID的内环电压电流控制器组成;在上层智能体中,微电网协调控制设计为H∞鲁棒控制器。构建了微电网电压稳定性评估指标,当微电网承受小干扰时,评估指标在安全域内,此时则仅依靠分散控制策略来维护系统的电压;而当有大干扰发生时,评估指标超出安全域,此时则起动协调控制,并与分散控制一起维护电压稳定。最后,仿真结果验证了控制策略的有效性。
微电网 多智能体系统 分散协调控制 H∞鲁棒控制 电压评估指标
0 引言
随着分布式发电在电力系统中的不断渗透,由分布式电源(distributed generator,DG)、储能装置、负荷和控制装置组成的微电网备受关注。作为一种新型高效的能源利用形式,微电网既可以并网运行,也可以孤岛运行[1,2]。在大电网正常运行状态下,微电网工作在并网模式,维护微电网稳定性的任务主要由大电网来承担。大电网出现故障后,电力系统的继电保护装置静态开关动作,断开微电网与大电网的连接,微电网进入孤岛运行状态,此时微电网失去了大电网的支撑,需要由内部的DG来维护系统的稳定运行。因此,如何对微电网内部的多种DG进行有效控制以保证微电网在不同运行模式下都能安全稳定运行成为微电网研究的一个难点[3,4]。
大多数DG及储能装置通过电力电子接口接入微电网,其控制策略主要由逆变器完成[5]。近年来,微电网逆变器控制技术的研究已取得很多成果,分散控制和集中控制是微电网控制方向的两大主要方法。分散控制是针对采用即插即用分布式电源的微电网提出的控制方法,是一种无通信互连线的控制技术[6]。每个个体单元都由相应的局部控制器独立控制,需要本地信息,而不需要通信技术,该方法将系统的不平衡功率动态分配给各机组承担,具有简单、可靠、易于实现的特点。对简单的微电网系统来讲,分散控制策略结合上层的能量管理系统能够维护微电网稳定。但随着新能源发电的不断渗透,微电网系统越来越复杂化,对于结构组成复杂的微电网系统,分散控制方法由于缺少单元系统之间的配合,在微电网遭受严重扰动时,系统的电压质量可能无法达到满意的效果。而集中控制方法则根据系统全局信息,由中心控制器统一控制各单元系统,对于结构简单的系统,该方法非常有效。集中控制的缺点是需要可靠的通信互连线,增加设备需要相应的通信通道支持,通信可靠性影响微电网运行。对于地域广阔、结构复杂的微电网系统而言,由于系统建模的巨大维数和信号传输的时滞问题,集中控制有时实现比较困难,即便实现可能也难以获得满意的控制效果。分散控制与集中控制各自具有优缺点,需针对不同的系统考虑采用不同的控制方法[7]。除此之外,更需要构建一种具有分散控制和集中控制的优点,也能克服它们的缺点的控制方法。基于上述思想,本文提出研究基于多智能体系统(Multi-Agent System,MAS)的分散协调控制策略来维护大扰动下微电网的电压稳定。
为了解决微电网动态稳定性问题,研究构建了基于MAS的分散协调控制策略。该MAS设计为两层智能体,下层单元智能体执行分散控制,即在下层智能体中,设计双环分散控制器,包括基于下垂特性的外环功率控制器和基于分数阶PID的内环电压电流控制器。上层智能体执行协调控制策略,即在上层智能体里,基于电压实时动态信息,构建电压评估指标,并采用H∞鲁棒控制方法结合线性矩阵不等式技术设计协调控制器;当上层智能体电压评估指标在安全域时,仅靠分散控制器维护系统稳定,当评估指标超出安全阈值时,上层智能体起动相应的协调控制器,此时协调控制器与分散控制器一起维护系统稳定。该方法既能在大扰动时维护全系统良好控制性能,又便于实现。最后,仿真验证了该控制方法的有效性。
1 基于MAS的微电网控制框架
MAS是由多个智能体构成的一种分布式自主系统,是人工智能系统的一个重要分支和新颖的课题发展方向[8,9]。MAS是通过各智能体的自主行为以及它们之间的通信、协调、调度及控制来表现系统的结构、功能和行为特征。MAS在表达各种实际系统方面提供了统一的模型和框架,能很好地解决复杂系统的通信问题,基于MAS的分散协调控制结构如图1所示。
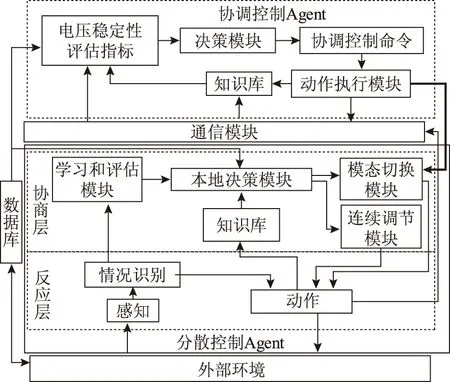
图1 基于MAS的分散协调控制策略Fig.1 The decentralized coordinated control based on MAS
在基于MAS的分散协调控制策略中,下层分散控制单元智能体包括DGs Agent(DA)、储能Agent、负荷Agent。下层各单元智能体被设计成一个混合智能体,分为反应层和协商层。其中反应层包括感知、识别和动作执行模块,既能感知外部环境也可作用于外部环境;协商层由数据库、学习和评估模块、本地决策模块等组成。下层单元智能体的主要功能是执行分散控制,根据系统目前的干扰情况和自身的约束条件,调节相应DG单元的输出电压和功率,确保微电网系统电压稳定。
MAS系统拥有一个上层协调控制智能体(Coordinated Control Agent,CCA),包括数据库、知识库、电压稳定性评估模块、决策模块等模块,主要根据系统的干扰情况判定是否起动协调控制器。在该智能体中,电压稳定性评估模块根据系统的运行状态及时测量系统电压,对系统电压进行稳定性评估。得到稳定性评估指标后,通过决策模块确定相应的控制命令。该控制命令通过行为执行模块发送到协调控制器,指导协调控制器执行相应的动作。
在MAS中,单个智能体可能由于所掌握的信息不完整或能力、资源不够的缘故,无法独立完成某项任务,此时各智能体单元之间需进行交互,在能力和资源上互相支持,最终实现系统的目标。图2描述了两层智能体之间的交互过程。智能体之间的交互可分为直接交互和间接交互,由上层协调控制智能体到下层各单元智能体的交互通过直接作用实现。由下层各单元智能体到上层的协调控制智能体的交互行为是基于环境和交流间接实现。

图2 分散控制智能体和协调控制智能体交互过程Fig.2 Process of interaction between DAs and CCA
2 分散控制器设计
微电网通过静态开关PCC连接到大电网,如图3所示。PCC断开,微电网进入孤岛运行模式,内部各DG单元需要维持整个电网系统的电压稳定,满足负荷功率需求。每个DG都是通过电力电子接口逆变器接入微电网,故多智能体系统的下层单元智能体分散控制器的设计是通过设计接口逆变器来实现[10,11]。

图3 基于MAS的典型微电网系统Fig.3 Typical structure of MAS based micro-grid
在下层单元智能体中,双环分散控制器包括基于下垂特性的外环功率控制器和基于分数阶PID的内环电压电流控制器,下面将详细介绍该控制器的设计方法,图4描述了分散控制器的基本结构。
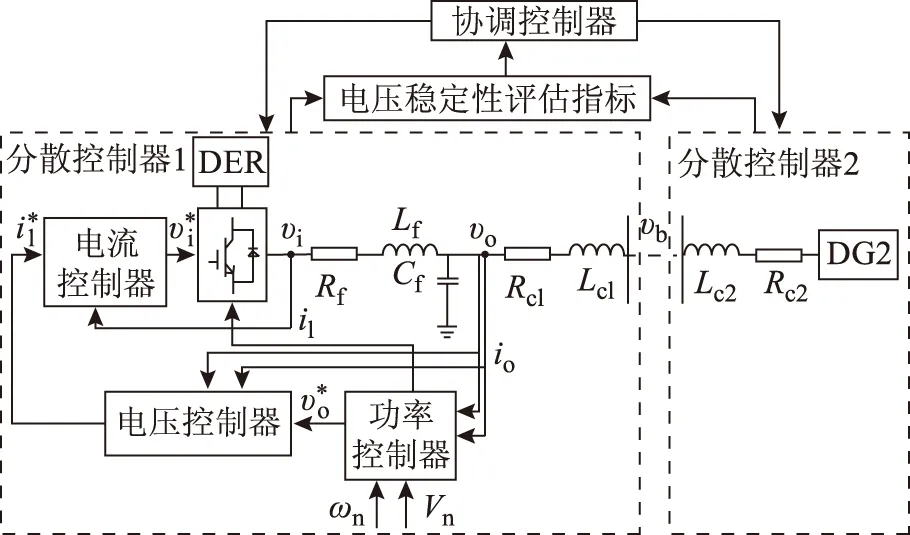
图4 分散控制器基本结构图Fig.4 The basic block diagram of decentralized controller
2.1 外环功率控制器设计
下垂控制方法使逆变器的输出模拟高压电力系统中同步发电机的频率和端电压与所输出的有功功率和无功功率之间的下垂特性。在低压配电系统中线路的电阻值大于电抗值,但可通过整体设计使逆变器的输出阻抗呈感性,保证下垂特性成立[12,13]。
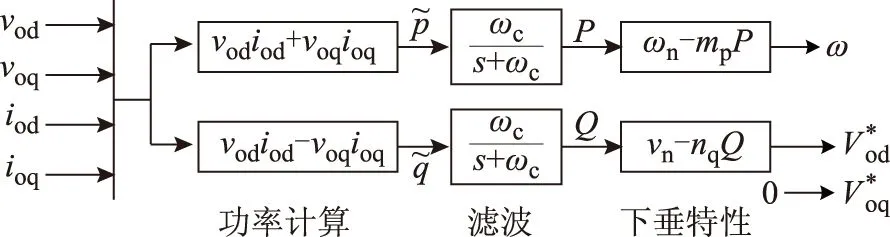
图5 功率控制器的基本框图Fig.5 The basic block diagram of power controller
结合图5,可得到功率的差分方程
(1)
(2)
其中,根据下垂特性及给定的频率和电压幅值可得到下垂系数mp和nq
(3)
(4)
2.2 内环电压电流控制器设计
2.2.1 内环电压电流控制器设计
图6为采用分数阶PID控制器设计的内环电压电流控制器结构图。分数阶PID控制器(包含分数阶积分器和微分器)将传统的PID控制器的阶次推广到分数领域,它不但适合于分数阶系统,也适用于某些整数阶系统,除了包含传统控制器的3个参数KP、KI、KD外,还增加了两个可调参数λ和μ,即积分阶数λ和微分阶数μ。其中,λ主要影响系统的稳态精度,μ主要影响系统的超调,由于增加了两个自由度,使得控制器的设计更加灵活,控制器性能更加优越,因此能够取得一些优于整数阶PID控制器的效果[14]。
电压控制器相应的状态方程为
(5)
(6)
(7)
(8)
式中,Φd和Φq为分数阶PID控制器的输出;ωb为参考角频率。
电流控制器包含5个参数KPC、PIC、KDC、α和β,相应的状态方程为
(9)
(10)
(11)
(12)
式中,Ψd和Ψq为分数阶PID控制器的输出,其他参数如图6所示。
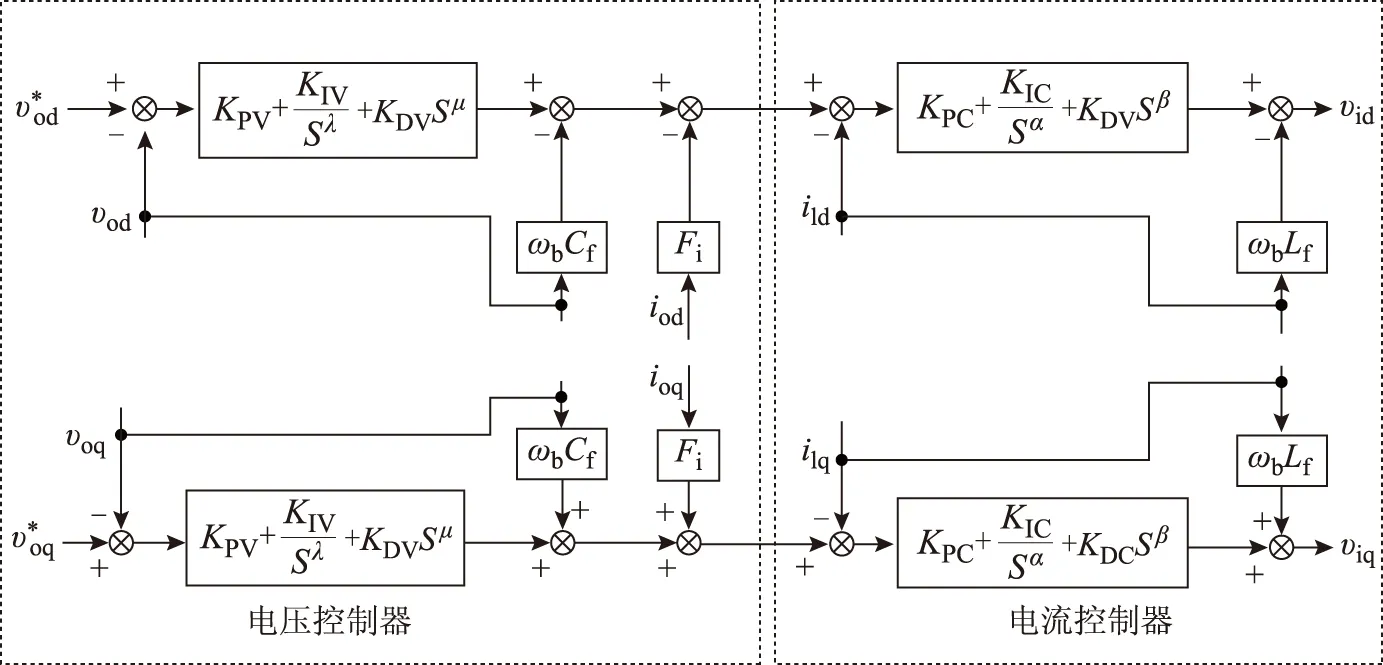
图6 内环电压电流控制器结构图Fig.6 Structure of the inner voltage and current controller
2.2.2 遗传算法整定分数阶PID参数
分数阶PID控制器是整数阶PID控制器的一般形式,由于其积分、微分阶次可在分数范围内任意取值,故其参数整定问题倍受关注,因为各参数取值及参数组合将直接影响控制器控制性能。目前,PID参数的整定与优化方法很多,如Z-N法、继电型自整定法、最优设计法及梯度法、单纯形法。但各有其弊,前3种整定方法带有经验性且不是最优解,后两种极易陷入局部最优点。而遗传算法是一种寻求全局最优且不需任何初始信息的高效优化方法,故将遗传算法应用于分数阶PID参数寻优[15,16]。
分数阶PID控制器的传递函数可表示为
(13)
时间域控制信号u(t)可写成
u(t)=KPe(t)+KID-λe(t)+KDDμe(t)
(14)
1)确定参数变量和约束条件。分数阶PID控制器包含5个参数,可根据参数的物理意义和经验来确定它们的取值范围,在本文中KP:[0,1],KI:[0,20],KD:[0,100],λ:[0,2],μ:[0,2]。
2)确定目标函数。为了获得满意的动态过程特性,采用误差绝对值时间积分性能指标作为参数选择的最小目标函数。为了防止控制能量过大,在目标函数中加入控制输入的平方项。参数选取的最优指标为
(15)
式中,e(t)为系统误差;u(t)为控制器输出;tu为上升时间;ρ1、ρ2、ρ3为权重系数。
3)确定编码和编码方法。采用二进制编码方法,遗传操作方便,解码处理后即可得到最优解。解空间和遗传空间有一一对应的关系,完成运算后按式(16)进行解码得到参数最优值。
(16)
4)确定个体评价方法,即确定个体的适应度函数为f=1/J。
5)确定遗传算法的运行参数。根据实际情况选择的运行参数主要包括群体大小M,终止进化代数G、交叉概率Pc及变异概率Pm。
6)通过Matlab编程仿真可得到每个参数的最优值。
3 协调控制器设计
3.1 电压稳定性评估指标
在上层协调控制智能体中,需通过构建评估电压稳定性的方法来决定是否起动协调控制器,故在本节中,提出一种可靠的且适用于微电网的电压稳定性评估指标。

i节点在j时刻电压的移动平均值为
(17)
(18)
则i节点在j时刻的电压偏差表示为
(19)

由于电压偏差可表示系统动态过程节点电压的变化程度,则可定义第i个节点在j时刻的电压安全指标为
(20)
(21)
则j时刻的电压稳定性评估指标为
(22)
式中,Uth为略小于1的正数,取决于系统的负荷或无功补偿等特性。
以下方法用来衡量系统电压是否稳定:


3.2 协调控制器设计
在上层智能体中,微电网协调控制器采用H∞鲁棒控制方法结合线性矩阵不等式技术来设计,以两台DG构成的微电网为例,但研究表明提出的控制策略可扩展到多台DG存在的微电网模型[17,18]。两台DG单一线路结构模型如图7所示,应用KVL和KCL,微电网系统的动态方程如下所示。

图7 两机微电网单一线路结构Fig.7 A single line diagram of the two DGs micro-grid
此时微电网的状态空间模型可概括表示为
(23)
式中,ui(t)=[Vo1dVo1qVo2dVo2q]T为输入变量;xi(t)=[ic1dic1qiLdiLqic2dic2qVbdVbq]T为状态变量;zi(t)=[VbdVbqic2dic2q]T为输出变量。
系统矩阵A、B、C为
在实际电力系统中,考虑到参数不确定性和外界干扰,微电网动态状态空间模型(23)可总结为
(24)
设计状态反馈控制器
ui(t)=K1xo(t)+K2xc(t)=Kxi(t)
(25)
式中,K=[K1K2]为状态反馈增益矩阵;xi(t)=[xo(t)xc(t)]T为系统状态变量。
假设:在式(24)中的摄动矩阵ΔA、 ΔB是范数且有界的,且具有以下形式
[ΔAΔB]=HΣ(t)[EaEb]
(26)
式中,H、Ea、Eb为已知的常数矩阵,反映不确定参数的结构信息;Σ(t)是一个满足ΣT(t)Σ(t)≤I的不确定矩阵。
将式(25)、式(26)代入到式(24),可得到
(27)
选取系统的Lyapunov函数为
(28)
式中,P为对称正定的Lyapunov矩阵。
在不考虑初始条件情况下,系统H∞鲁棒性能指标
(29)
式中,γ>0为给定的常数;Tzw(s)为由w(t)到z(t)的传递函数。
定理1:对于给定的不确定系统(24)在状态反馈控制器下保持闭环系统(27)渐近稳定且满足的鲁棒控制性能(29),当且仅当存在正定对阵矩阵P=PT>0满足不等式
(30)

(31)
由于不等式(31)是严格成立的,故总是可选择一个适当的常数ε(0<ε<1),使得
对于任意的tf>0,考虑
根据矩阵的Schur补性质,利用零初始条件,即得

由此即可证明不等式(29)成立。在上述证明过程中,需要处理系统矩阵中包含的参数不确定性,为此,采用文献[19]中引理4.1处理未知矩阵Σ(t)。
定理2:若状态反馈控制ui(t)=Kxi(t)能使参数不确定系统(24)保持式(29)所要求的H∞鲁棒控制性能,当且仅当存在一个常数ξ>0和对称矩阵P=PT>0满足下述不等式
(32)
式中,Φ=P(A+BK)+(A+BK)TP。
证明:记
根据
由文献[19]中引理4.1可知,当且仅当存在常数ξ>0,对所有满足ΣT(t)Σ(t)≤I的矩阵Σ(t)成立。不等式(30)可等价地写为
进一步应用矩阵的Schur补性质,上式等价为式(32),定理3.2得证。
将求解不确定系统的鲁棒控制器参数问题归结到线性不等式求最优化的问题上
minγ
s.t.1)式(32)
2)P=PT>0
其最优解是一个具有线性矩阵不等式约束和线性目标函数的凸优化问题,可应用Matlab软件中的LMI优化工具箱,得到最优的γ值,得到鲁棒控制器的参数。
4 仿真研究
为了验证提出的分散协调控制策略的有效性,在Matlab/Simulink平台上,根据图7搭建了两台DG构成的微电网运行的仿真模拟结构图,仿真参数设计如表1所示。基于MAS的微电网系统包含一个上层协调控制智能体,下层两个分散控制单元智能体,电压评估指标实时测量系统电压,两层控制智能体根据当前的系统状态给出相应的控制命令以确保系统电压稳定。DG的额定输出为311V,系统中原始负荷为3 000W,300var。微电网始终工作在孤岛运行模态下,2台DG以1∶1比率平均分配系统功率。为了有效验证提出的分散协调控制策略的有效性,对系统进行极端验证,在突加/突减90%负荷的情况下,验证单台DG输出的有功功率、无功功率、电流和电压的变化情况。

表1 两台DG构成微电网系统仿真参数Tab.1 Simulation parameters of two DGs in micro-grid system
4.1 突加90%负荷
微电网系统中原始负荷为3 000 W,300 var,在t=0.4 s,突加90%负荷,增加的有功功率为2 700 W,无功功率为270 var,此时系统中总负荷为5 700 W,570 var。2台DG以1∶1比率平均分配系统功率。实验得出单台DG输出的有功功率、无功功率、电流和电压的变化情况如图8所示。
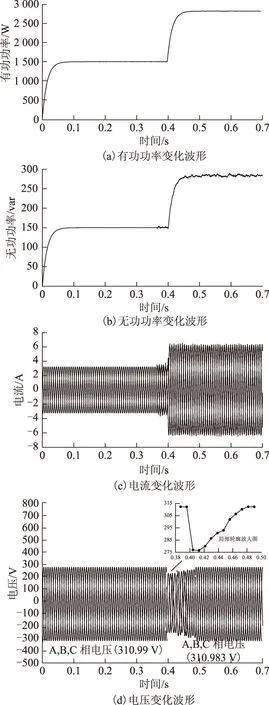
图8 分散协调控制下微电网系统突加90%负荷实验波形Fig.8 The experimental waveforms of micro-grid with 90% load increasing under decentralized coordinated control scheme
微电网在t=0 s时开始孤岛稳定运行,DG输出额定电压稳定在311 V,t=0.4 s突加90%负荷,突变瞬间,产生失电压现象。上层智能体中的电压稳定性评估指标测量到电压波动已超过安全阈,协调控制智能体起动协调控制器,与分散控制器共同维护系统电压稳定。经过一定时间的暂态后,单台DG的输出功率增加为2 850 W,285 var,输出电流增大,根据下垂特性系统的电压减少,最终稳定在310.983 V,与额定电压值吻合。
4.2 突减90%负荷
在原始负荷3 000 W,300 var基础上,在t=0.4 s,突减90%负荷,即2 700 W,270 var,此时系统中总负荷为300 W,30 var,单台DG的实验波形如图9所示。
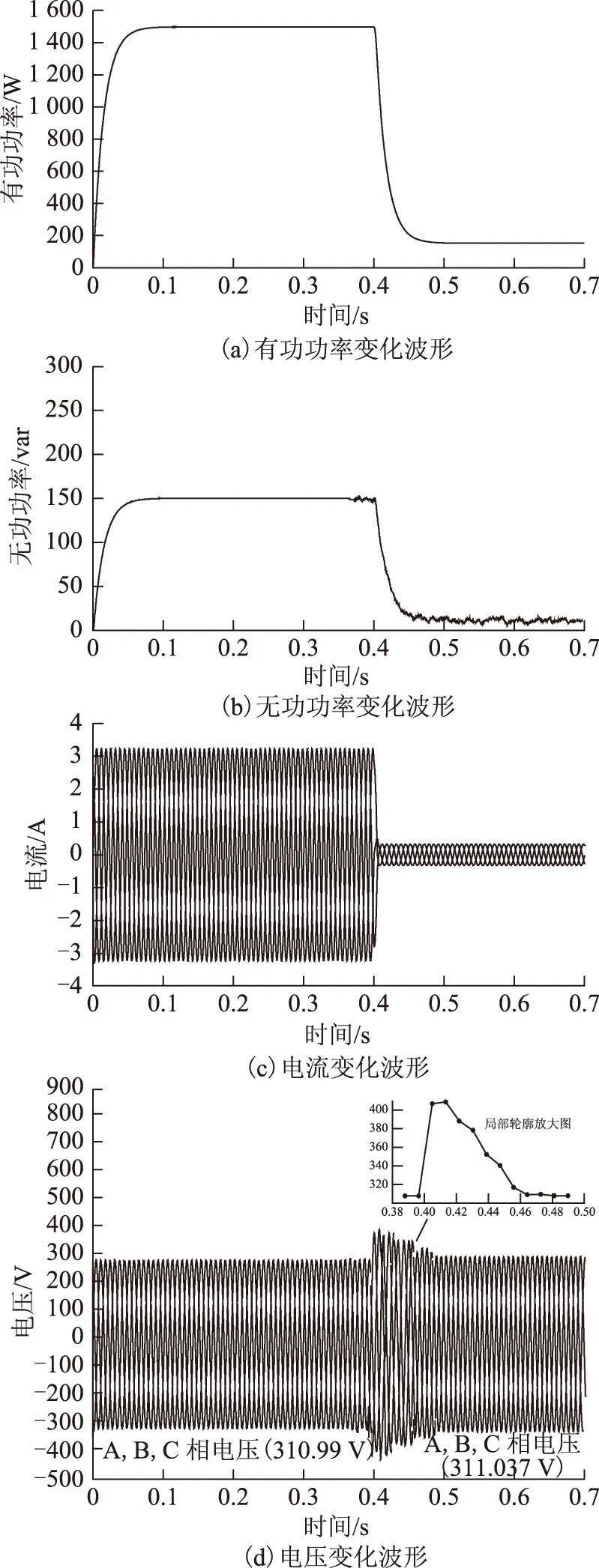
图9 分散协调控制下微电网系统突减90%负荷实验波形Fig.9 The experimental waveforms of micro-grid with 90% load decreasing under decentralized coordinated control scheme
微电网孤岛稳定运行,t=0.4 s突减90%负荷,突变瞬间,产生过电压现象,上层智能体中的电压稳定性评估指标测量到电压波动超出安全阈,协调控制器起动。经过一定时间的暂态后,单台DG输出的功率减少为150 W,15 var,输出电流减少,根据下垂特性系统的电压增加,最终稳定在311.037 V,与额定电压值吻合。
从上述仿真结果可知微电网在孤岛模式下设计的基于多智能体系统分散协调控制器能够使系统在严重负荷干扰情况下维护电压稳定且具有很好的鲁棒性能,验证了该分散协调控制策略的有效性。
5 结论
为了提高微电网大干扰情况下的动态稳定性,设计了基于MAS的分散协调控制策略。针对微电网系统研究构建了基于MAS两层控制方案。在下层单元智能体中,构建双环分散控制器,即下垂特性的外环功率控制器和分数阶PID电压和电流控制器,并用遗传算法优化各控制器的参数;在上层智能体中,构建了电压稳定性评估指标,并设计了H∞鲁棒协调控制器,由该评估指标判定协调控制器是否处于启动模态,以确保微电网在大干扰下的动态稳定性。最后,仿真结果表明该控制策略在大扰动下能够维护微电网电压稳定。
[1] 王成山,武震,李鹏.微电网关键技术研究[J].电工技术学报,2014,29(2):59-68. Wang Chengshan,Wu Zhen,Li Peng.Research on key technologies of microgrid[J].Transaction of China Electrotechnical Society,2014,29(2):59-68.
[2] Basak P,Chowdhury S,Dey S H N,et al.A literature review on integration of distributed energy resources in the perspective of control,protection and stability of microgrid[J].Renewable and Sustainable Energy Reviews,2012,16(8):5545-5556.
[3] Bidram A,Davoudi A.Hierarchical structure of microgrids control system[J].IEEE Transactions on Smart Grid,2012,3(4):1963-1976.
[4] 苏玲,张建华,王利,等.微电网相关问题及技术研究[J].电力系统保护与控制,2010,38(19):235-239. Su Ling,Zhang Jianhua,Wang Li,et al.Study on some key problems and technique related to microgrid[J].Power System Protection and Control,2010,38(19):235-239.
[5] 蒋冀,段善旭,陈仲伟.三相并网/独立双模式逆变器控制策略研究[J].电工技术学报,2012,27(2):52-58. Jiang Ji,Duan Shanxu,Chen Zhongwei.Research on control strategy for Three-Phase double mode inverter[J].Transactions of China Electrotechnical Society,2012,27(2):52-58.
[6] 郭佳欢,谢清华,黄伟.基于MAS的微电网即插即用理论研究[J].电网与清洁能源,2010,26(1):31-35. Guo Jiahuan,Xie Qinghua,Huang Wei.Study on the plug and play theory in micro-grid based on MAS[J].Advances of Power System & Hydroelectric Engineering,2010,26(1):31-35.
[7] 薛迎成,邰能灵,刘立群,等.微电网孤岛运行模式下的协调控制策略[J].中国电力,2009,42(7):36-40. Xue Yingcheng,Tai Nengling,Liu Liqun,et al.Cooperation control strategies for islanded microgrids[J].Electric Power,2009,42(7):36-40.
[8] Dou Chunxia,Liu Bin,et al.Hierarchical management and control based on MAS for distribution grid via intelligent mode switching[J].International Journal of Electrical Power and Energy Systems,2014,54:352-366.
[9] 章健,艾芊,王新刚.多代理系统在微电网中的应用[J].电力系统自动化,2008,32(24):80-82,87. Zhang Jian,Ai Qian,Wang Xingang.Application of multi-agent system in a microgrid[J].Automation of Electric Power Systems,2008,32(24):80-82,87.
[10]Pogaku N P M,Green T C.Modeling,analysis and testing of autonomous operation of an inverter-based microgrid[J].IEEE Transactions on Power Systems,2007,22(2):613-625.
[11]王成山,肖朝霞,王守相.微网中分布式电源逆变器的多环反馈控制策略[J].电工技术学报,2009,24(2):100-107. Wang Chengshan,Xiao Chaoxia,Wang Shouxiang.Multiple feedback loop control scheme for inverters of the micro source in microgrids[J].Transactions of China Electrotechnical Society,2009,24(2):100-107.
[12]孙孝峰,吕庆秋.低压微电网逆变器频率电压协调控制[J].电工技术学报,2012,27(8):77-84. Sun Xiaofeng,Lü Qingqiu.Improved PV control of grid-connected inverter in low voltage micro-grid[J].Transactions of China Electrotechnical Society,2012,27(8):77-84.
[13]鲍薇,胡学浩,李光辉,等.独立型微电网中基于虚拟阻抗的改进下垂控制[J].电力系统保护与控制,2013,41(16):7-13. Bao Wei,Hu Xuehao,Li Guanghui,et al.An improved droop control strategy based on virtual impedance in islanded micro-grid[J].Power System Protection and Control,2013,41(16):7-13.
[14]Tehrani K A,Amirahmadi A,Rafiei S M R,et al.Design of Fractional order PID controller for Boost converter based on Multi-Objective optimization[C].14th International Power Electronics and Motion Control Conference,Ohrid,2010:179-185.
[15]Li Meng,Xue Dingyu,Wrubel J N.Design of an optimal fractional-order PID controller using multi-objective GA optimization[C].Chinese Control and Decision Conference,Guilin,2009:3849-3853.
[16]Liu Manyu,Dong Huaying,Liang Guishu.SVC voltage regulator based on fractional order PID[C].International Conference on Control Engineering and Communication Technology,Liaoning,2012:28-32.
[17]马添翼,金新民,黄杏.含多变流器的微电网建模与稳定性分析[J].电力系统自动化,2013,37(6):12-17. Ma Tianyi,Jin Xinmin,Huang Xing.Modeling and stability analysis of microgrid with multiple converters[J].Automation of Electric Power Systems,2013,37(6):12-17.
[18]李海平,唐巍.风/光/储混合微电网的详细建模与仿真[J].电力系统保护与控制,2012,40(18):133-138. Li Haiping,Tang Wei.Detailed modeling and simulation of wind/PV/storage hybrid micro-grid[J].Power System Protection and Control,2012,40(18):133-138.
[19]Dou Chunxia,Jia Xingbei,Bo Zhiqian,et al.Hybrid control for micro-grid based on hybrid system theory[C].IEEE Power and Energy Society General Meeting,San Diego,CA,2011:1-11.
Multi-Agent System Based Decentralized Coordinated Control Strategy for Micro-grids
DouChunxiaLiNaXuXiaolong
(Institute of Electrical Engineering Yanshan University Qinhuangdao 066004 China)
For the dynamic stability of the micro-grid in the case of the outside disturbance,this paper proposes a decentralized coordinated control strategy for the micro-grid based on the multi-agent system.The multi-agent system has two levels.In the lower level agents,the decentralized control of the distributed power generation unit is designed as a double loop controller,including an outer power controller based on the droop characteristic and the fractional order PID inner voltage and current controllers.In the upper level agents,the coordinated controller of the micro-grid system is designed as the H∞robust controller.The mode of the coordinated controller is determined by the voltage stability,so this paper proposes the voltage stability risk index.When the micro-grid suffers slight disturbances,the voltage stability risk index is in the safety threshold,and the decentralized control is used to maintain the voltage stability of the system alone.When a severe disturbance occurs,the voltage stability risk index is out of the safety threshold,and the coordinated control starts and operates together with the decentralized control to maintain the voltage stability of the system.Finally,simulation studies demonstrate the effectiveness of the control scheme.
Micro-grid,multi-agent system,decentralized coordinated control,H∞robust control,the voltage stability risk index
国家自然科学基金(51177142)和河北省自然科学基金(F2012203063)资助项目。
2014-12-10 改稿日期2015-01-20
TM464
窦春霞 女,1967年生,教授,博士生导师,研究方向为新能源控制技术、电力大系统分布式控制、微电网智能控制等。(通信作者)
李 娜 女,1990年生,硕士研究生,研究方向为微电网能量管理及控制。
猜你喜欢
煤气与热力(2021年12期)2022-01-19
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
自动化学报(2017年4期)2017-06-15
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电测与仪表(2015年15期)2015-04-12
电网与清洁能源(2015年2期)2015-02-28
电测与仪表(2014年22期)2014-04-04
筑路机械与施工机械化(2014年4期)2014-03-01