基于电感模型的开关磁阻电机参数优化
2015-04-06 06:19蒯松岩汤锐智马金洋李兴红孙文兵
电工技术学报 2015年7期
蒯松岩 汤锐智 马金洋 李兴红 孙文兵
(1.中国矿业大学信息与电气工程学院 徐州 221008 2.江苏省电力传动与自动控制工程技术研究中心 徐州 221116)
基于电感模型的开关磁阻电机参数优化
蒯松岩1,2汤锐智1马金洋1李兴红1孙文兵1
(1.中国矿业大学信息与电气工程学院 徐州 221008 2.江苏省电力传动与自动控制工程技术研究中心 徐州 221116)
针对分析得到的磁链估算误差,提出用来修正磁链估算误差的定子回路等效电阻Req校准方法。在建立开关磁阻电机(SRM)电感模型的基础上,首先通过实验完成等效电阻Req的校准。然后在SRM控制系统中,通过在线检测方法获得电机磁链数据,将测量得到的磁链离散数据贮存于控制器的RAM中。最后,通过数据分析处理,得到优化后的电感参数。实验结果证明该方法简单高效,能够实现SRM高性能控制。
开关磁阻电机 电感模型 磁链估算 等效电阻
0 引言
开关磁阻电机与传统交流电机相比较,具有结构简单、控制方便、机械效率高、工作可靠等优点[1]。SRM的解析数学模型大致可分为基于磁链的模型和基于电感的模型。SRM电感参数的获取实际上是磁链特性数据的获取。目前还无法从理论上得到ψ(i,θ)的精确关系。因此,准确检测出电机磁链与相电流和转子位置间的关系是电感参数精度的保证。
文献[2~4]采用有限元分析法,通过ANSYS等软件输入电机本体参数,建立电机和绕组回路的模型,然后通过仿真获得ψ(i,θ)特性曲线。此方法能从理论上获得电机的磁链特性,但需要准确的电机本体参数,建模困难,缺少实践检验,实用性低。文献[5-7]采用直流法,通过向相绕组施加直流电压,根据磁链与相电压和相电流的关系计算电机的磁链特性。文献[8]通过使用磁流管直接测量电机磁通量的大小,通过复杂的计算得到磁链特性,且成本较高。文献[9,10]采用交流法,通过测量电机在固定角度的电压与电流关系推出电机磁链特性,同样需要机械分度仪、液压闸等特殊工具。通过比较可发现,由于实验测量法综合了涡流、互感等影响电机磁链特性的多种因素,因此,通过实验测量得到的SRM磁链特性更加精确、可靠,具有实际应用价值。文献[1,6,7,9-13]中均提到了影响电机磁链检测准确度的定子回路电阻R,在SRM处于堵转或低速运行情况下,R对磁链的估算准确度影响较大,不可忽略。然而,在实际测量过程中,普遍忽略R或将其作为定值处理,降低了磁链估算准确度和电机起动性能。针对这一问题,本文首先分析了电阻R对磁链估算的影响,然后提出了电机定子回路等效电阻Req的校准方法。采用基于DSP2812为控制核心的SRM系统,通过实际校准获得了等效电阻实验数据,采用在线检测磁链测量方法解决了测量过程中相绕组电压重构问题,提高了SRM电感系数的计算准确度,改善了电机起动和低速运行性能。
1 SRM非线性电感模型的建立及参数计算
1.1 电感模型的建立
建立适合SRM的模型是实现电机高性能控制的基础,本文采用的非线性电感模型是SRM非线性模型的一种。SRM的相电感是转子位置角度θ的周期性偶函数,其波形形状与余弦函数相似,因此,相电感可用傅里叶级数表达为[14]
(1)
其一相电感可简化表达为
L(i,θ)=L0(i)+L1(i)cos(Nrθ)+L2(i)cos(2Nrθ)
(2)
式中,Nr为转子极数;θ为电机的转子位置机械角度。L0(i)、L1(i)、L2(i) 3个参数可根据转子3个特殊位置的电感La(i)、Lm(i)、Lu(i)求得,即转子与定子磁极完全对齐处电感、中间位置处电感、完全不对齐处电感。
根据式(2),当θ分别取0°、11.25°、22.5°时可建立求解L0(i)、L1(i)、L2(i)的矩阵方程
(3)
若将L0(i)、L1(i)、L2(i)表示成电流的N次多项式,即
(4)
只要确定An、Bn、Cn,就可得到非线性电感的近似解析表达式。
1.2 电感参数获取方法
根据公式Ψk=Lk(ik,θ)ik可得到La(i)、Lu(i)、Lm(i)与磁链的关系为
(5)
图1是SRM基于非线性电感模型的电感参数的获取步骤。
2 基于在线检测法的SRM磁链特性获取
2.1 磁链估算方法及误差分析
本文以SRM三相不对称半桥拓扑进行分析[14]。在不考虑功率器件的导通压降的情况下,根据SRM的电压方程,可得磁链的微分为
(6)
其中
(7)
式中,VT1,2表示功率开关管的状态;Us为直流母线电压。绕组压降ikR一般远小于母线电压,当电机处于中速以上时,积分时间短,ikR项对积分结果的影响相对较小。但是,当电机处于堵转或极低速情况时,其影响不可忽略。为了保证电机在起动和低速运行时的性能,绕组磁链估计不仅不能忽略绕组压降ikR,还需要考虑到功率器件的导通压降对系统的影响。
开关管导通压降VT和二极管的导通压降VD并不是一个定值。以IGBT为例,VT会受到导通电流、器件结温和门极开通电压VGE的影响,如图2所示。
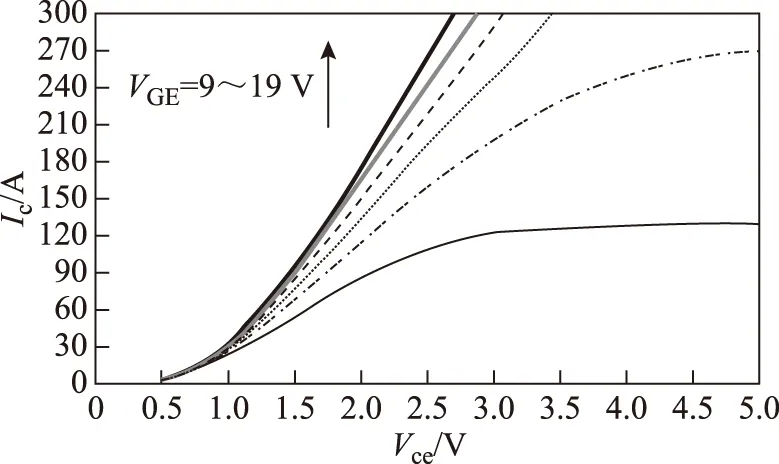
图2 IGBT(FF200R17KE3G)导通压降特性曲线Fig.2 IGBT(FF200R17KE3G) conduction voltage drop characteristic curve
在保证一定精度的同时,为了简化分析,假设IGBT的开通电压恒定,IGBT和二极管结温恒定,VT和VD随电流变化的特征相同,既VT=VD=iRT(i)。
由公式(6)可得到在考虑功率器件影响下的磁链的表达式
(8)
其离散形式为
(9)
式中,Req(i)=R+2RT(i),是定子绕组电阻R与2倍IGBT通态电阻RT之和的等效电阻。只要能准确获得它,就可改善基于电感或磁链模型控制的SRM起动和低速运行性能。
2.2 磁链估算中等效电阻的校准
1)等效电阻的校准原理
如图3所示,根据公式(8),当电机转子处于某个固定位置时,给定恒定电流,其磁链值保持不变。
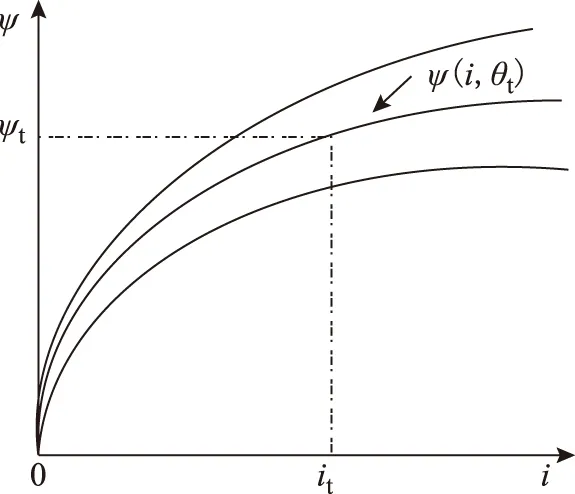
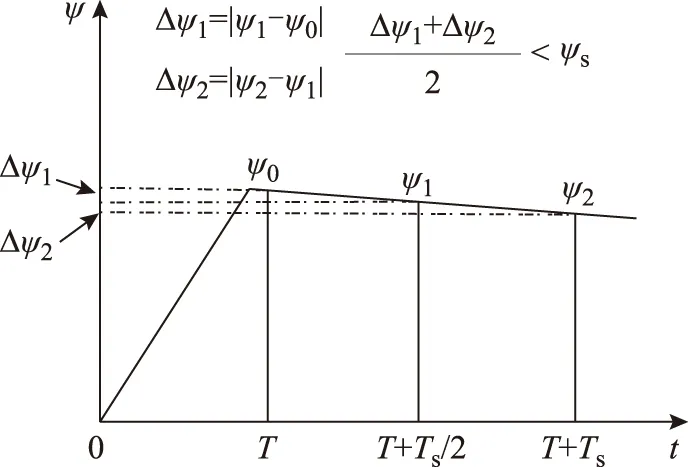
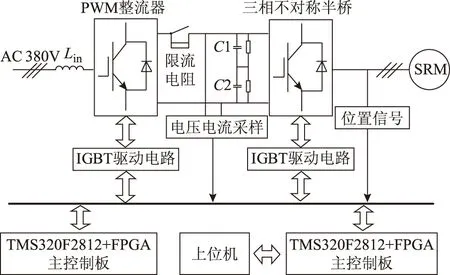
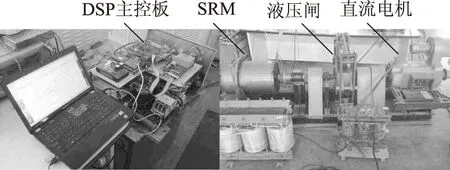
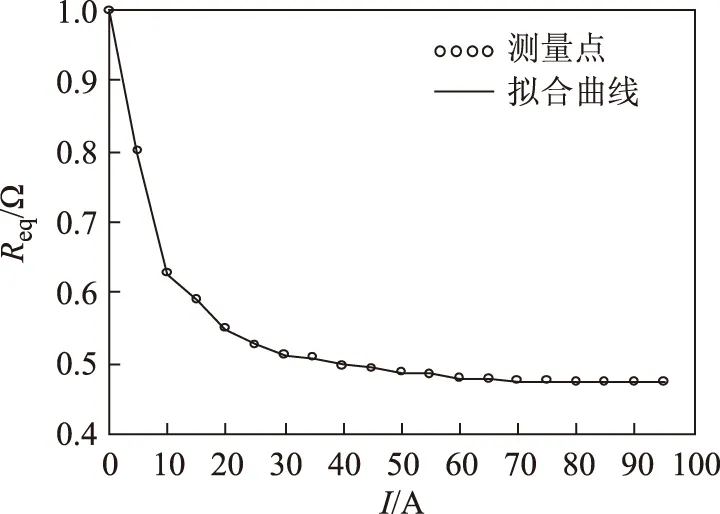
图3 等效电阻校准原理Fig.3 Equivalent resistance calibration principle
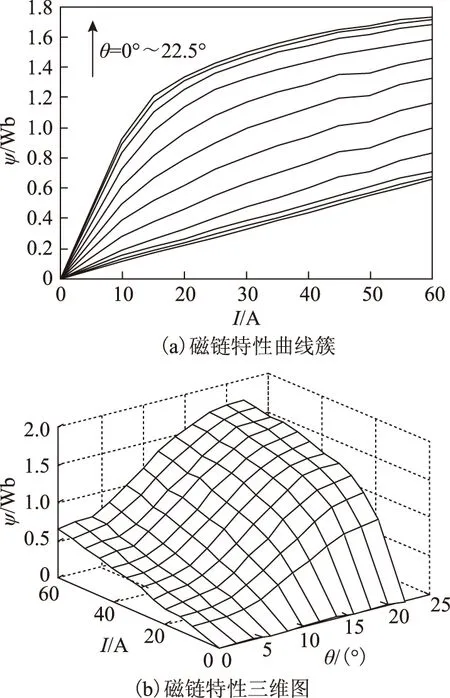
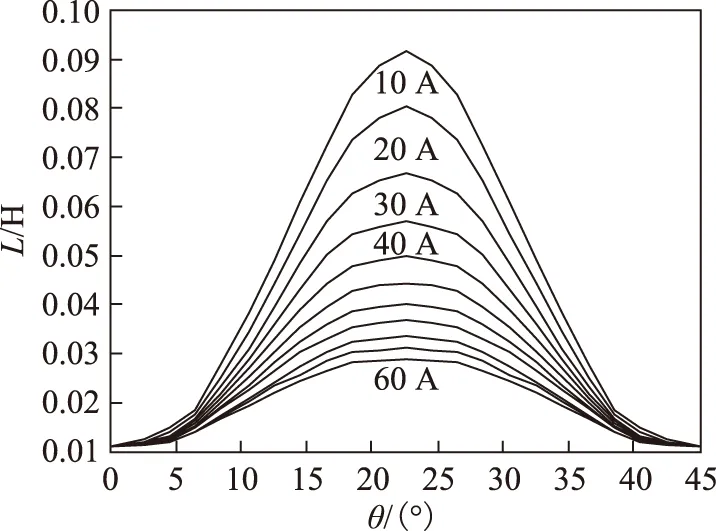
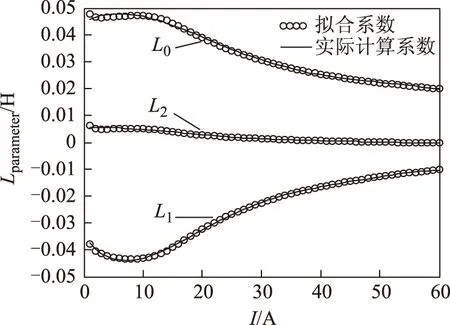
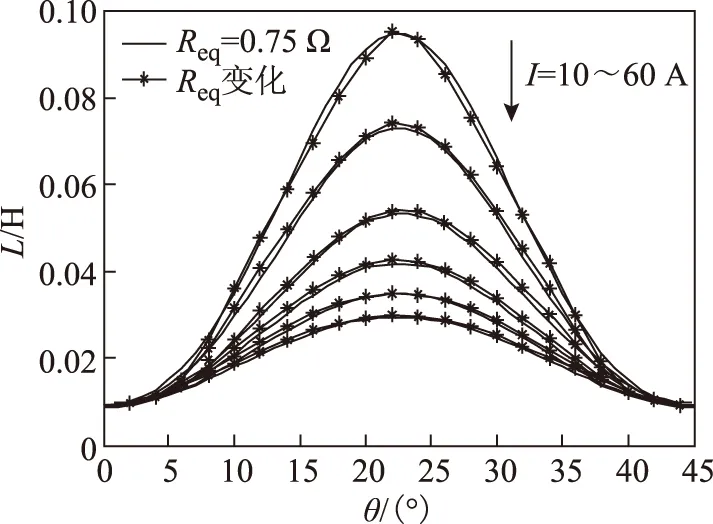
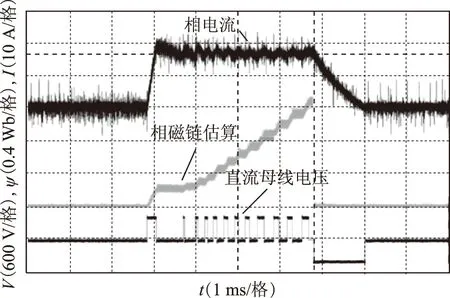
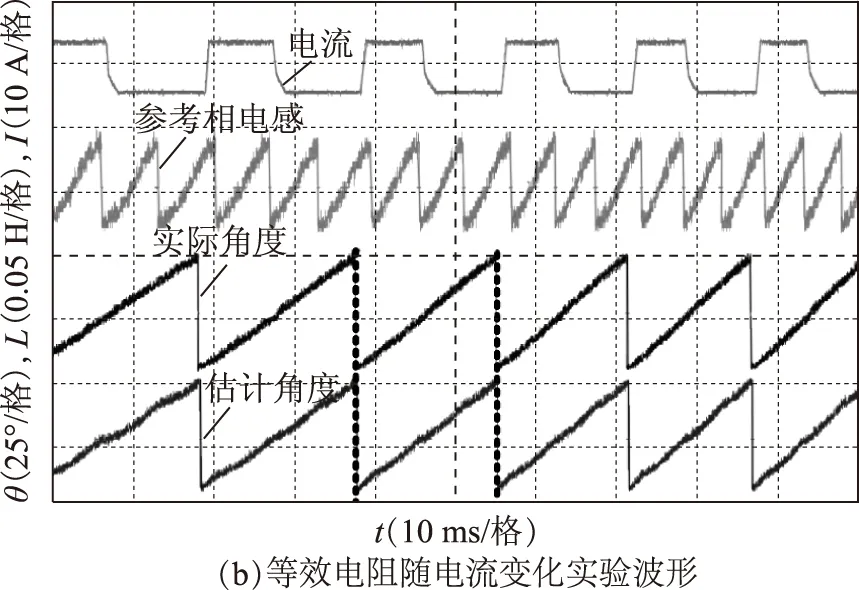
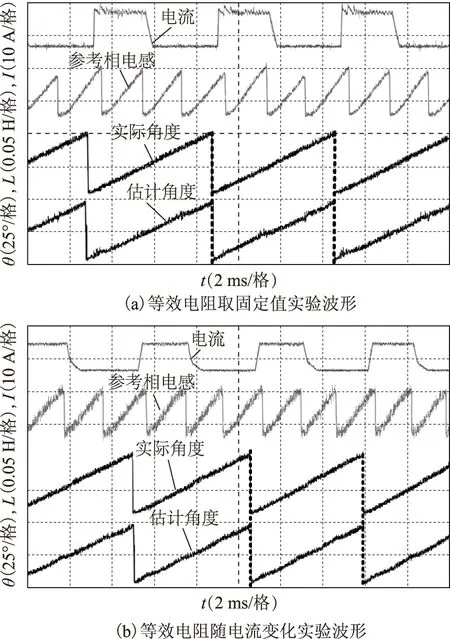
如图4所示,当电机转子固定在θt时,通过电流斩波控制方式向相绕组注入恒定电流it,当电流从0升到it且最后稳定在it附近,在此过程中按公式(9)对相绕组磁链进行估算。当Req(i)=R+2RT(i)时,ψ(t)在电流稳定后应保持一个相对恒定的值;当Req(i)>R+2RT(i)时,ψ(t)会增加到一个最大值后开始衰减,因为电流稳定后,Req值偏大会使得积分值随积分时间的增加而不断减小。当Req(i) 图4 等效电阻校准方法示意图Fig.4 Equivalent resistance calibration method diagram 2)等效电阻的校准方法 根据等效电阻校准的原理,提出了通过在线检测程序来判断在恒定电流下选取的等效电阻值是否匹配,如图5所示。 图5 等效电阻匹配条件示意图Fig.5 Equivalent resistance matching condition diagram 当磁链ψ(t)上升到最大值后,在T时刻存储估算磁链值ψ0,整个判断时间持续Ts,并在T+Ts/2和T+Ts时刻存储磁链值ψ1和ψ2,计算出Δψ1和Δψ2,如果(Δψ1+Δψ2)/2<ψs,则认为等效电阻匹配。 参数Ts和ψs需要根据实际运行情况进行设置。Ts的大小决定了电阻匹配的准确度,时间越长,通过积分修正的次数也越多,等效电阻的匹配时间也越长。参数ψs因为CCC控制方式的原因,估算磁链会有一定波动,ψs是一个允许的磁链波动的范围,决定了磁链估算的准确度,如果ψs太小,可能会造成Req(i)校准失败。 根据等效电阻校准方法,需要将电机转子位置固定。本文选取转子凸极与定子凸极完全对齐的位置,即θ=22.5°时。因为,在此角度下,根据SRM的转矩特性,此时相绕组通入电流不产生转矩,这样电机在空载或轻载的条件下,可通过较大的电流将转子固定到该位置处。 2.3 磁链特性数据获取 本文采用基于转速开环运行的方案,在线检测SRM的磁链特性。电机通过CCC控制方式,保证电机运行时各相电流都在给定电流附近。导通角θon=0°,关断角θoff=22.5°,这样就可获得转子由非对齐到对齐位置的磁链数据。 因为电机开环运行,电机转速将一直升高,本文选取200~300 r/min左右的速度作为采样开始点,每64 μs采样一次三相电流、磁链、位置角度和直流母线电压数据,直至采集到4 096个采样点后发出停机指令,整个采样时间持续0.262 s,将采样数据保存在控制器的RAM中,通过CCS上传至上位机完成数据采集。 按照同样的方法,继续获得不同电流条件下的电机磁链数据。 3.1 在线检测的硬件平台 SRM磁链特性在线检测方法能最大限度的利用电机控制器本身去完成测量过程,不需要额外添加变压器、液压闸、电阻器、分度仪等机械设备。 图6为在线检测SRM磁链特性的硬件平台。图7为硬件平台实物图。以一台三相12/8结构18.5 kW SRM为实验样机,额定电压514 V,额定转速1 000 r/min。功率电路采用三相不对称半桥电路,输入电压为三相交流380 V。以DSP F2812为核心控制芯片。通过ADS7864(采样速度500 kHz)对传感器输出进行采样。绕组电流与直流母线电压通过电流传感器(LEM LT108-S7,0.1%线性度,DC-100 kHz的频宽)和电压传感器(STCVI/800 V/40 mA,0.2%线性度)获得。 图6 在线检测磁链特性硬件平台Fig.6 Online testing flux characteristics of the hardware platform 图7 硬件平台实物图Fig.7 Real photo show of the hardware platform 3.2 等效电阻的校准 因为电流大于60 A后Req(i)基本趋于稳定,60 A之后的Req近似采用60 A处的匹配电阻值。0 A时无法测量Req,为了保证插值边界,0 A处的Req设为1 Ω。Req(i)随电流增加而变小,并逐渐趋于稳定,间接证明了等效电阻匹配的准确性。图8为Req(i)校准的实验结果。 图8 等效电阻校准结果Fig.8 Experiment results of equivalent resistance calibration 3.3 获取的SRM磁链特性 图9为通过转速开环方式得到的SRM磁链数据,测试电流从10~60 A,间隔5 A,共11组数据。 通过Matlab对图9的磁链数据进行处理,可得到图10的SRM磁链特性曲线簇和三维图。从图10可看出,磁链特性涵盖了电机全部运行轨迹。当电流小于15 A时,磁链随电流变化基本上呈线性变化,大于15 A后磁链趋于饱和,变化规律完全符合传统SRM磁链特性的一般变化规律。 图9 在线检测获得的电机磁链数据Fig.9 Online testing data of motor flux linkage 图10 在线检测获取的18.5 kW电机磁链特性Fig.10 Online testing 18.5 kW motor flux characteristics 3.4 在线检测获取的SRM电感特性曲线 将获得的SRM磁链特性曲线簇转换得到图11所示的SRM的实测电感特性曲线簇。可看出,电感随角度的变化类似于半个周期正弦曲线的变化,随着电流增加,电感的最大值不断变小,形状变得越来越扁。 图11 在线检测获取的电机电感特性曲线Fig.11 Motor inductance characteristic curves obtained through online testing 3.5 在线检测获取的电感参数 根据在线获取的样机磁链特性参数,得到不同电流下的La(i)、Lu(i)、Lm(i),通过公式(3)计算出0~60 A电流范围内的电感参数,得出了电感模型三项系数随电流的变化曲线。如图12中实线所示,随着电流增大,电感三项系数L0(i)、L1(i)、L2(i)的绝对值逐渐减小。当电流大于40 A时,L2(i)的值近似为零,表明了此时电感二次谐波分量几乎减小到零,只剩下基波分量和一次谐波分量。 图12 电感参数L0、L1、L2随电流变化曲线Fig.12 The curves of L0、L1、L2 with current changes 采用Matlab拟合工具对L0(i)、L1(i)、L2(i)进行拟合,从而获得非线性电感模型的参数An、Bn、Cn。当N=5时,An、Bn、Cn各系数如表1所示。 在Req取0.75 Ω固定值时按同样方法测量电感特性曲线,在电流为10~60 A时两次实测电感特性曲线对比如图13所示。由于无法得到精确电感特性曲线,测量得到的电感特性曲线的准确度只能通过实验进行验证。 表1 电感参数多项式拟合系数表Tab.1 Inductance parameter polynomial fitting coefficient table 图13 实测电感特性对比Fig.13 The comparison of nonlinear inductance modeling results 3.6 实验结果验证 图14是通过在线检测得到的相电流、估算磁链、直流母线电压波形。 图14 相电流、磁链估算与直流母线电压波形Fig.14 Waves of phase current、DC bus voltage and flux linkage estimation 为了验证优化后电感参数的精确性,完成了基于电感模型的SRM转子位置角度估算[15],能够实现对无位置传感器SRM的高性能控制。 图15给出了SRM由静止起动时Req取0.75 Ω时与等效电阻校准后角度估计对比波形。可看出,等效电阻校准前,电机起动和极低速运行时转子位置估计准确度低,波动大,严重影响电机起动性能。等效电阻校准后,角度估算相对均匀平滑,电机无抖动。证明了经过等效电阻校准后,得到的电感参数能够保证SRM良好的起动性能。 图15 起动时角度位置估计Fig.15 Position estimation at the start of SRM 图16、图17给出了电机以500 r/min和1 350 r/min运行时,Req取0.75 Ω与等效电阻校准后转子角度估计对比波形,虚线标出的区间对应0°~45°一个周期内实际角度。从图16可看出,Req取固定值时,参考相电感估计不稳定,转子角度估算波动相对较大。等效电阻校准后,相电感估计稳定,角度估算均匀平滑,提高了电机转子估计的准确度。从图17可看出,等效电阻校准后的转子位置估计准确度仍具有一定优势。因为随着转速上升,磁链积分时间缩短,使得Req对转子位置估计的影响逐渐变小,符合理论分析结果。 图16 500 r/min时转子位置估计实验波形Fig.16 Rotor position estimation at 500 r/min 图17 1 350 r/min时转子位置估计实验波形Fig.17 Rotor position estimation at 1 350 r/min 提出了影响SRM磁链估算准确度的定子回路等效电阻Req的校准方法,通过实验完成了等效电阻的匹配。整个测量过程将影响电机磁链特性的等效电阻、涡流损耗、互感效应等诸多因素考虑在内,在完成磁链特性测量的基础上,通过数据处理实现了电感参数的优化测量。实验结果表明: 1)提出的等效电阻校准方案能够实现Req的精确匹配,提高SRM电感参数的测量准确度。 2)优化后的电感参数能够提高SRM在起动和低速运行时的转子位置角度估计准确度,实现电机的高性能控制。 [1] Shen Lei,Wu Jianhua,Yang Shiyou,et al.Fast flux linkage measurement for switched reluctance motors excluding rotor clamping devices and position sensors[J].Instrumentation and Measurement,2013,62(1):185-191. [2] Parreira B,Rafael S,Pires A J,et al.Obtaining the magnetic characteristics of an 8/6 switched reluctance machine:From FEM analysis to the experimental tests[J].Industrial Electronics,2005,52(6):1635-1643. [3] Yi Lingzhi,Peng Hanmei,Liu Xiang,et al.Research of Switched reluctance generator position sensorless based on anfis by using finite element analysis[C].Power and Energy Engineering Conference(APPEEC),Wuhan,2011,1-4. [4] Ding Wen,Yin Zhonggang,Liu Ling,et al.Magnetic circuit model and finite-element analysis of a modular switched reluctance machine with e-core stators and multi-layer common rotors[J]. Electric Power Applications,2014,8(8):296-309. [5] Zhang Peng,Cassani P A,Williamson S S.An accurate inductance profile measurement technique for switched reluctance machines[J].Industrial Electronics,2010,57(9):2972-2979. [6] Minh Dinh Bui,Hoffmann S,Schafer U.An accurate magnetic characteristics measurement method for switched reluctance machines[C].International Conference on Electrical Machines and Systems (ICEMS),Beijing,2011:1-6. [7] 曾辉,陈昊,徐阳,等.基于新型磁链检测方案的开关磁阻电机非线性建模[J].电工技术学报,2013,28(11):124-130. Zeng Hui,Chen Hao,Xu Yang,et al.Modeling of switched reluctance motor based on a novel flux linkage characteristic measurement method[J].Transactions of China Electrotechnical Society,2013,28(11):124-130. [8] Sheth N K,Rajagopal K R.Calculation of the flux-linkage characteristics of a switched reluctance motor by flux tube method[J].Magnetics Conference,2005,41(10):1775-1776. [9] Zhao S W,Cheung N C,Gan W C,et al.A novel flux linkage measurement method for linear switched reluctance motors[J].Instrumentation and Measurement,2009,58(10):3569-3575. [10]Lu Kaiyuan,Rasmussen P O,Ritchie A E.Investigation of flux-linkage profile measurement methods for switched-reluctance motors and permanent-magnet motors[J].Instrumentation and Measurement,2009,58(9):3191-3198. [11]薛梅,夏长亮,王慧敏,等.基于DSP的开关磁阻电机磁链特性检测与神经网络建模[J].电工技术学报,2011,26(2):68-73. Xue Mei,Xia Changliang,Wang Huimin,et al.Flux linkage characteristic measurement based on DSP and artificial neural network modeling for switched reluctance motor[J].Transactions of China Electrotechnical Society,2011,26(2):68-73. [12]朱曰莹,赵桂范,龚进峰,等.新型两相同步对称励磁模式开关磁阻电机及其转矩特性[J].电工技术学报,2014,29(3):143-149. Zhu Yueying,Zhao Guifan,Gong Jinfeng,et al.A novel symmetrical double-phase-excitation mode and torque performance analysis for switched reluctance motors[J].Transactions of China Electrotechnical Society,2014,29(3):143-149. [13]郭增慧.开关磁阻电机磁链特性间接检测与应用[D].南京:南京航空航天大学,2011. [14]Chi H P,Lin R L,Chen J F.Simplified flux-linkage model for switched-reluctance motors[J].IEE Proceedings Electric Power Applications,2005,152(3):577-583. [15]Misawa S,Miki I.A rotor position estimation using fourier series of phase inductance for switched reluctance motor[C]. International Symposium on Power Electronics Electrical Drives Automation and Motion (SPEEDAM),Pisa,2010:1259-1263. 蒯松岩 男,1978 年生,博士,副教授,硕士生导师,研究方向为开关磁阻电机及其控制。 汤锐智 男,1990 年生,硕士研究生,研究方向为开关磁阻电机及其控制。(通信作者) Parameter Optimization of the Switched Reluctance Motor Based on the Inductance Model KuaiSongyan1,2TangRuizhi1MaJinyang1LiXinghong1SunWenbing1 (1.School of Information and Electrical Engineering China University of Mining and Technology Xuzhou 221008 China 2.Jiangsu Electrical Drive and Control Engineering Research Center Xuzhou 221116 China) In view of the flux linkage estimation error through analysis,a method is proposed in order to calibrate the equivalent resistance (Req),which can revise the estimation error.In this paper,the inductance model of the SRM is built first.And thenReqis calibrated through experiments.After that,in the SRM control system,the received data of the flux linkage from online testing is stored in the RAM of the controller.At last,the inductance parameter is calculated through data analysis.According to the experimental results,this method is proved to be simple,effective,and can realize high performance control of SRM. SRM,inductance model,flux linkage estimation,equivalent resistance 江苏省自然科学基金(BK2009526)和中国博士后科学基金(20100481176)资助项目。 2014-11-15 改稿日期2015-01-20 TM352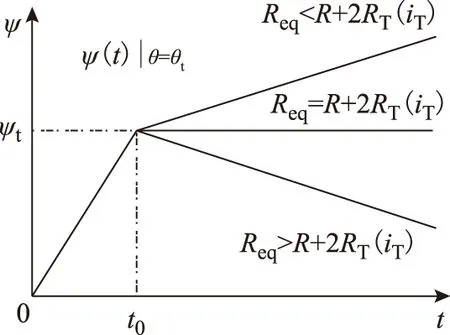
3 在线检测的实验结果分析及实验验证




4 结论
猜你喜欢
中学生数理化·中考版(2020年10期)2020-11-27
中学生数理化·中考版(2018年11期)2019-01-31
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
制造技术与机床(2017年3期)2017-06-23
电测与仪表(2016年10期)2016-04-12
通信电源技术(2016年5期)2016-03-22
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年16期)2015-04-12
电测与仪表(2014年13期)2014-04-04