超低轨道卫星摄动特性分析及轨道维持方法*
2015-04-04 01:45温生林
国防科技大学学报 2015年2期
温生林,闫 野,易 腾
(国防科技大学航天科学与工程学院,湖南长沙 410073)
超低轨道是指飞行于大气层以外而又低于一般航天器轨道高度的轨道,本文将超低轨道界定为轨道高度在120km以上、300km以下的飞行轨道。超低轨道飞行具有较大的经济效益和工程应用价值,主要体现在:1)实现高分辨率对地侦察。对已有侦察载荷而言,选择更低的轨道,可有效提高地面图像分辨率,获取更好的观测效果。2)有效降低发射成本。在相同运载能力情况下,采用的轨道更低,超低轨道卫星的载荷能力更强,其效费比将比传统航天器显著提高。由于轨道高度低,超低轨道卫星的飞行环境和传统卫星有很大不同,稀薄大气和地球非球形摄动对轨道的影响显著,且大气密度随昼夜、季节、太阳活动变化剧烈,超低轨道卫星受到的气动力比传统低轨卫星要高出两到三个数量级[1]。尽管超低轨道上的大气密度为10-11~10-9kg/m3的量级,作用在卫星上产生的气动力能够达到几十毫牛的量级[2],但长期积累,对卫星轨道的干扰影响巨大,若不进行轨道维持,卫星轨道会迅速衰减,因此,已有的飞行计划都选择避开这一空间区域,研究超低轨道维持的控制技术对于实现长时间的超低轨道飞行意义重大。
超低轨道飞行技术受到了美国、日本、欧空局等航天大国和著名研究机构的重视。当前,世界上已经发射和在研的真正实施超低轨道飞行计划的卫星有三颗:欧空局的GOCE卫星[3]、日本宇宙航空研究局(JAXA)正在开发的SLAST卫星[4]以及美国Microcosm公司的NanoEye卫星[5]。欧空局于2009年3月发射的GOCE卫星是第一颗真正意义上的超低轨道卫星。GOCE卫星重约1t,采用细长体构型,发射高度为275km,在轨运行高度为250~260km,实际在轨飞行时间超过3年。SLAST卫星的飞行高度为180km,搭载离子引擎,以维持高度,飞行时间为半年,配备小型摄影机,卫星用很少的电力就能获得很高的图像解析度,实施高清晰度全天候监控。NanoEye是美国Microcosm公司正在研发的一颗对地观测卫星,其轨道采用超低近圆轨道,近地点高度200km、远地点高度300km,预计飞行时间为6个月~1年。NanoEye卫星是一颗低成本、高分辨率的成像侦察卫星,其净重约20.6kg,可携带数倍于自身重量的推进剂,因而具有较好的机动性,使其在更低的轨道上(如160km)执行侦察任务。
目前,已有一些学者针对超低轨道卫星轨道保持问题展开了研究。文献[6]引入仅受地球引力作用的虚拟卫星作为参考卫星,采用标准的线性二次调节器把低轨卫星轨道控制问题当成是卫星编队来进行优化,该方法需事先对大气阻力摄动进行预估。文献[7]采用高精度加速度计测量卫星受到的非保守力,采用内嵌模型估计卫星的状态与干扰,研究了利用内嵌模型实现GOCE卫星无阻力姿态与轨道控制的方法,该方法需要有高精度的姿态测量与稳定控制。文献[8]给出了超低冻结轨道的概念,研究了利用常值小推力进行超低轨道维持的控制方案,这种控制策略是常值小推力以轨道周期为单位间歇工作,该控制方案在剧烈变化的强大气阻力摄动作用下,将不能有效实现超低轨道高度的维持。
本文以飞行在轨道高度为120~300km超低轨道卫星的轨道维持问题为研究对象,由于受到强大气摄动连续耗散力的作用,轨道长半轴将不断衰减[9],并面临着大气摄动随太阳活动、季节变化、光照条件变化而不确定波动的难题,轨道控制方案与传统的基于轨道根数的控制方法有很大不同[10-11]。考虑到进行轨道控制时,轨道偏心率会发生变化,为此,分析了在地球非球形引力摄动和大气阻力摄动作用下偏心率的变化特性。在此基础上,基于能量守恒原理提出了超低轨道维持的速度脉冲控制策略,对超低轨道维持的仿真结果表明,所设计的控制方案在实现轨道高度维持的同时,也将使得平均轨道偏心率矢量收敛至平衡位置,且用于轨道维持的燃料消耗合理,能够满足长时间的超低轨道飞行要求。
1 超低轨道偏心率变化分析
1.1 J2、J3项作用下轨道偏心率的变化特性
考虑地球引力J2、J3摄动项,偏心率和近地点幅角的长期变化率为[12]
式(1)中:a、e、ω和i分别为轨道长半轴、偏心率、近地点幅角和轨道倾角,p=a(1-e2);n为轨道平均角速度;RE为地球半径;J2和J3分别为地球引力二阶和三阶带谐项系数,ε的表达式如下

偏心率矢量定义为
偏心率矢量大小为偏心率,方向由地心指向轨道近地点,偏心率矢量随时间的变化可由以下微分方程描述:
利用式(1),保留e的一阶项,可得

式(3)中:

由式(3)可得
给定初始偏心率e0和近地点幅角ω0,对式(4)积分,可得

另一方面,根据式(4),可得
对上式积分,有

综合以上分析,在J2、J3摄动项作用下,偏心率矢量的运动轨迹是以(0,ef)为圆心,C为半径的圆,偏心率矢量的旋转角速度为K。
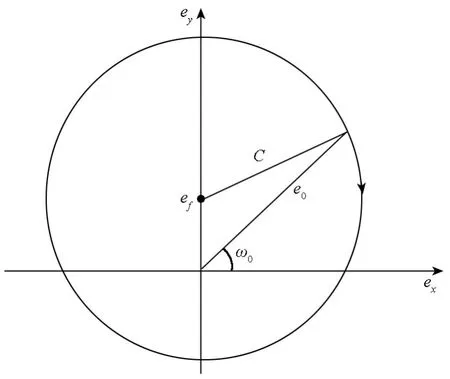
图1 J2、J3摄动作用下平均偏心率矢量示意图Fig.1 Average eccentricity vector sketch caused by J2,J3 zonal terms

图2 J2、J3摄动作用下平均偏心率矢量变化的仿真Fig.2 Average eccentricity vector simulation curve caused by J2,J3 zonal terms
初始时刻卫星的平均轨道根数为a=6558.137km,i=90°,Ω =0°,ω =90°,f=-90°。计算可知:ef=0.001 137,偏心率矢量旋转角速度K=-9.13 ×10-7rad·s-1,(负号表示顺时针旋转),旋转周期为79.65d。在J2、J3摄动作用下初始偏心率取不同值时偏心率矢量的变化如图2所示。由图2可知,偏心率矢量的运动轨迹是以ef为圆心且过初始偏心率的圆。
1.2 大气阻力作用下偏心率及近地点幅角的变化
超低轨道上的大气密度随太阳活动、季节、地磁场、光照条件等因素剧烈变化,在一个轨道周期内,可将大气密度ρ表示成偏近点角E的函数ρ(E)。假设大气阻力引起的轨道衰减可由轨道控制进行补偿,在大气阻力摄动作用下偏心率和近地点幅角的运动方程为[13]

式(8)中:f为轨道真近点角,CD为阻力系数,A为迎风面积,m为卫星的质量。

在大气阻力作用下,偏心率的平均变化率为
其中:
近地点幅角的平均变化率为
其中:


1.3 超低轨道偏心率矢量稳定性分析
结合式(1)、式(10)和式(11),在 J2、J3引力摄动和大气阻力摄动作用下,忽略O(e)项,偏心率和近地点幅角的平均变化率为

将式(14)代入式(13),可得
式(15)给出了在地球引力和大气阻力作用下冻结轨道偏心率和近地点幅角的表达式,当当超低冻结轨道偏心率矢量可能的取值区域如图3所示。
下面进行超低冻结轨道偏心率稳定性的分析,由式(14)可得偏心率和近地点幅角的雅可比矩阵在冻结轨道偏心率处的取值为
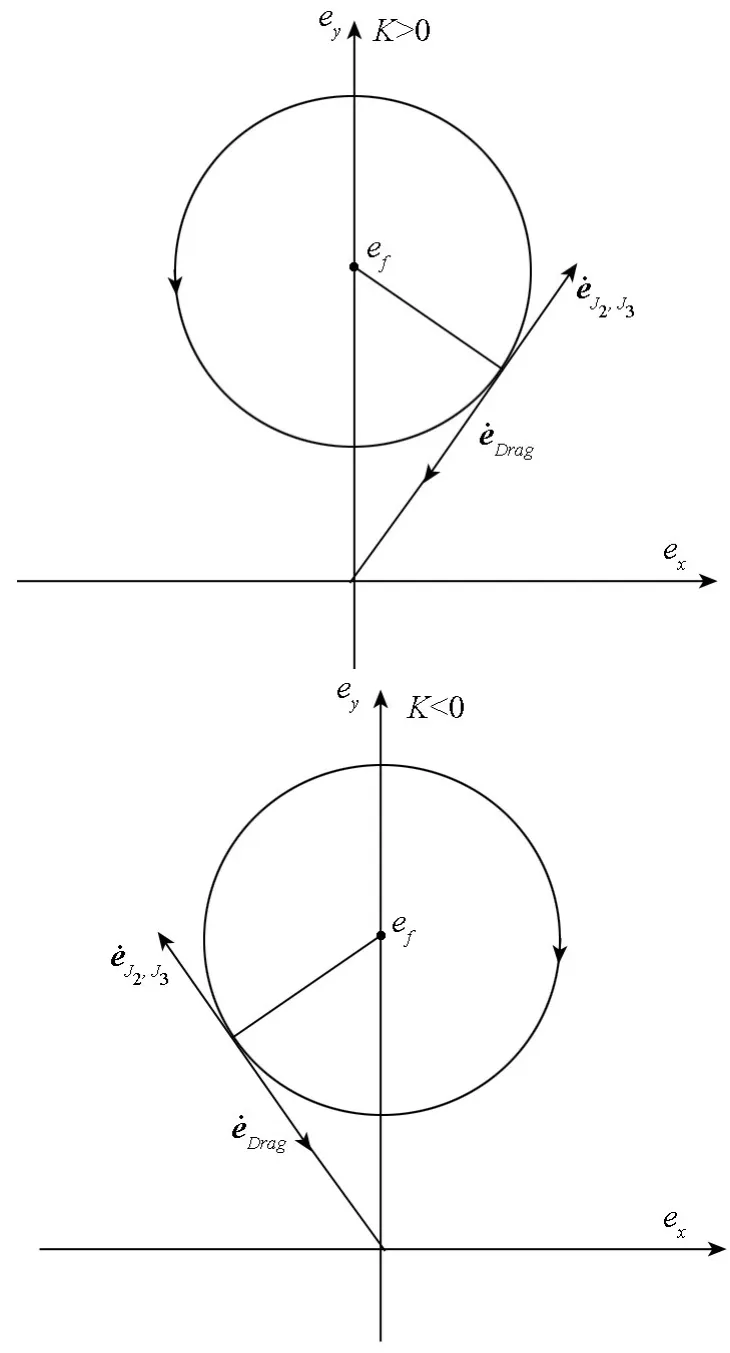
图3 超低冻结轨道偏心率矢量的可能区域Fig.3 Possible region of super low altitude frozen eccentricity vector
偏心率和近地点幅角的特征方程为

特征方程的根为

特征根的实部
考虑到特征根的实部小于零,所以超低冻结轨道偏心率的变化是稳定的。当不考虑大气密度、大气密度为常值和余弦函数模型时,冻结轨道偏心率eDf、冻结轨道近地点幅角ωDf以及特征根的计算结果如表1所示。
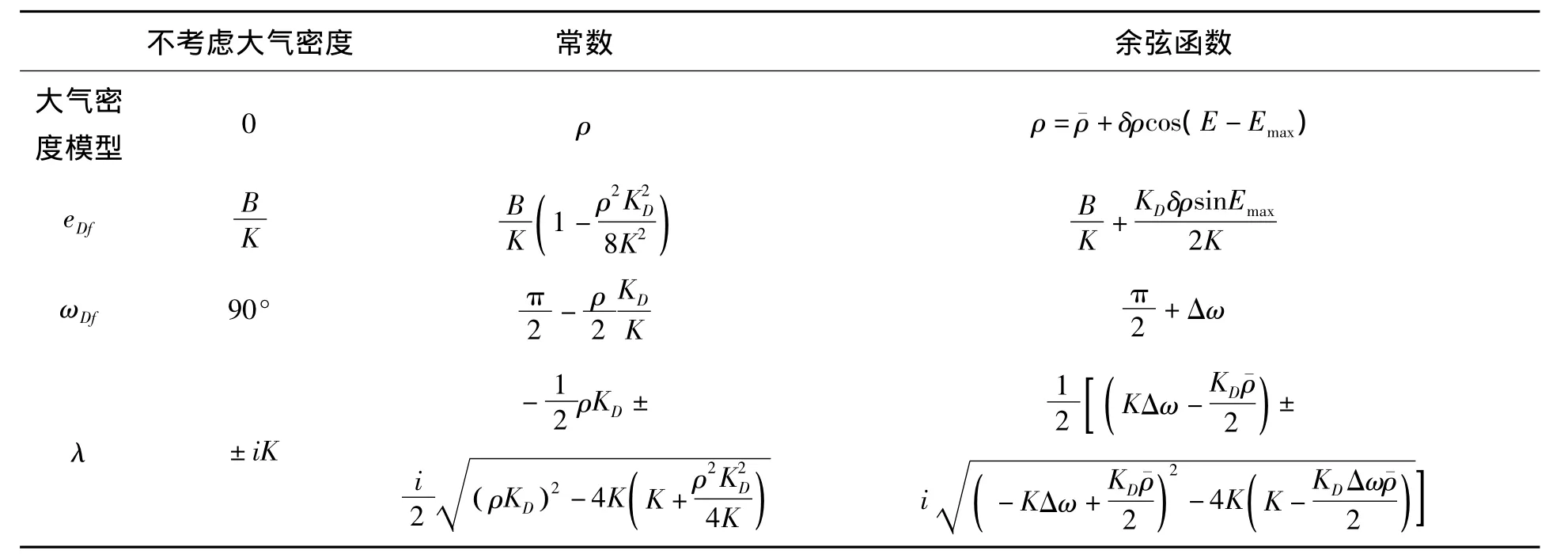
表1 超低冻结轨道偏心率与特征根Tab.1 Eccentricity and roots of super low altitude frozen orbit
表1中:

需要说明的是:上述结论是在仅考虑了地球引力和大气阻力的影响,且认为轨道长半轴保持不变的假设下做出的。事实上,若在飞行过程中施加控制力,则轨道偏心率矢量的变化是复杂的。以上分析过程表明:在大气阻力摄动作用下,轨道偏心率会变小,大气阻力起到恢复力的作用。因此,在实施超低轨道高度维持的轨道控制时,可以不考虑轨道控制引起的轨道形状的改变。
2 基于能量守恒原理的超低轨道维持方法
地球引力是保守力,在地球引力场中,卫星在轨运行仅存在动能和势能的相互转化,其机械能是守恒的,即动能与势能之和是常量。单位质量的机械能ξ可表示为

式(20)中:U为地球的引力位函数。
计算引力位函数U时考虑中心引力、J2项以及J3项摄动,将更高阶非球形引力摄动项当作扰动位函数进行处理,其表达式为

大气阻力和控制力是非保守力,在地球引力、大气阻力和控制力共同作用下机械能变化率的计算公式为
式(22)中:h为动量矩,r为地心距,vx为速度在轨道坐标系径向分量,uT和uR分别表示控制加速度在轨道坐标系的径向和横向分量。
若仅在横向施加控制加速度uT(t),则可表示为

根据式(23)可知,进行超低轨道维持所需的速度脉冲ΔvT为

式(24)中:ξ0为初始时刻超低轨道卫星单位质量的机械能。
3 仿真分析
本文以轨道高度为200km的超低轨道卫星为例进行仿真和分析。初始时刻卫星的平均轨道根数为 a=6578.137km,i=45°,Ω =0°,f=0°,大气阻力系数CD=2.2,卫星质量为500kg,面质比为0.02,轨道计算考虑了2阶、3阶引力场模型和大气阻力摄动,大气密度采用Harris-Priester大气模型进行计算,仿真时间为50d。
在一个轨道周期内,分别在真近点角f0和f0+π处施加两次速度脉冲进行轨道衰减补偿控制,所需的速度脉冲由式(21)计算得到。
3.1 轨道高度维持的仿真结果
初始时刻平均偏心率为零,超低轨道高度维持的仿真结果如图4、图5所示。图4和图5分别给出了卫星的平均轨道高度和机械能在一天内的变化情况,图中的虚线分别代表了初始时刻的平均轨道高度和单位质量的机械能,可以看出,其轨道高度和单位质量的机械能均始终在初始值附近变化。由图5可以看出,在半个轨道周期内,大气阻力可使轨道降低约1.2km。图6给出了进行轨道衰减补偿控制所需的速度脉冲在一天内的变化情况。
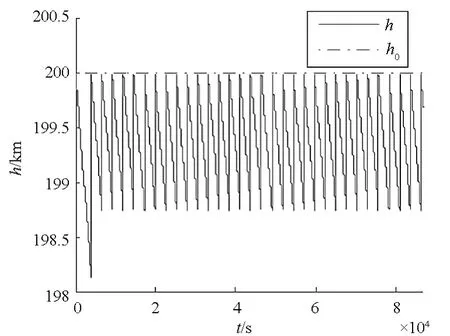
图4 轨道高度变化曲线Fig.4 Curve of altitude change

图5 机械能变化曲线Fig.5 Curve ofmechanical energy change
表2给出了在整个轨道维持时间内平均轨道高度偏差、机械能偏差以及速度脉冲的统计结果。可以看出,采用速度脉冲的轨道维持策略时轨道高度偏差不超过-1871.2m,轨道高度偏差的平均值为-626.5m;轨道维持所需的速度脉冲最大值为 1.099m/s,平均值为 0.734m/s。在整个轨道维持时间内,所需总的速度脉冲为1247.7m/s,若发动机比冲 Isp=300s,则轨道维持所消耗的燃料质量为172.9kg,用于轨道维持的燃料消耗量占卫星总质量的34.6%,这表明:超低轨道维持的控制策略设计合理,能够满足长时间超低轨道飞行的要求。
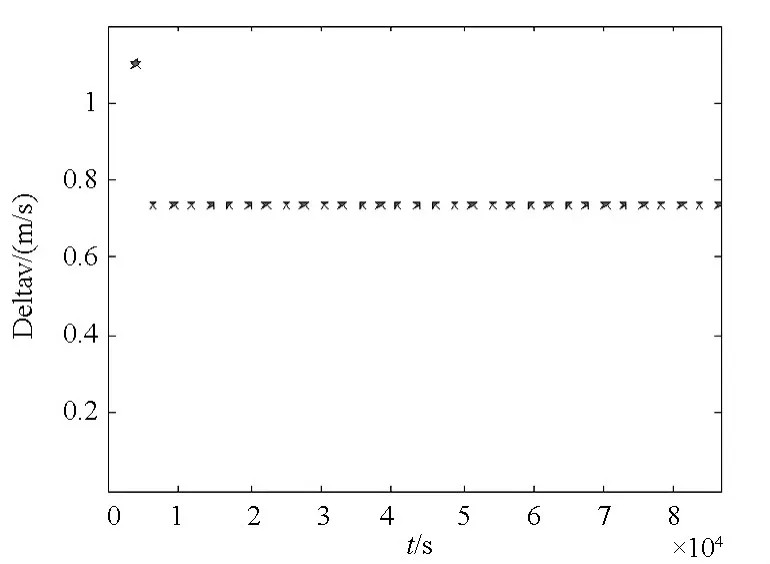
图6 轨道维持所需的速度脉冲Fig.6 Velocity increment for orbitmaintenance
3.2 偏心率矢量的变化仿真

图7 平均偏心率变化曲线Fig.7 Changes of average eccentricity
初始平均偏心率为0.005,初始近地点幅角分别取 0°、90°、180°以及270°时偏心率和偏心率矢量的仿真结果见图7。图7给出了偏心率的变化曲线,由图7可得:平均偏心率在5d内从初值0.005 收敛至稳定值 0.001,随后在 0.001 附近保持小幅震荡。图8给出了偏心率矢量的变化曲线,由图7可得:虽然初始偏心率矢量不同,偏心率矢量都可以收敛至稳定位置,其中:初始近地点幅角取0°和270°时,偏心率矢量最终稳定在[0,0.001]附近;初始近地点幅角取90°和180°时,偏心率矢量最终稳定在[-0.001,0]附近。结合图7和图8可知:在地球非球形引力摄动、大气阻力摄动和速度脉冲作用下,偏心率矢量从不同的初始值均可以收敛至原点附近的平衡位置,平衡位置取决于大气阻力、控制力以及偏心率矢量初始值等多种因素。

图8 偏心率矢量变化曲线Fig.8 Curve of average eccentricity vector change
4 结论
本文研究了超低轨道卫星的轨道自主维持方法,分析了超低轨道卫星在地球非球形引力摄动、大气阻力摄动作用下偏心率矢量的变化特性,提出了基于能量守恒原理的超低轨道维持策略。最后,以轨道高度为200km、质量为500kg的超低轨道卫星为例进行了仿真分析,主要结论有:
1)若不进行轨道维持,在半个轨道周期内大气阻力可使轨道衰减约1.2km;在一个轨道周期内施加两次速度脉冲进行轨道衰减的补偿控制,在整个在轨飞行时间内,轨道高度偏差的平均值为-626.5m,轨道高度偏差不超过-1871.2m。
2)初始偏心率矢量不同,在地球引力、大气阻力和速度脉冲共同作用下,偏心率矢量最终将收敛至原点附近。
3)在轨飞行 50d,所需总的速度脉冲为1247.7m/s,轨道维持所消耗的燃料质量为172.9kg,用于轨道维持的燃料消耗量占卫星总质量的34.6%,这表明:超低轨道维持的控制策略设计合理,能够满足长时间超低轨道飞行要求。
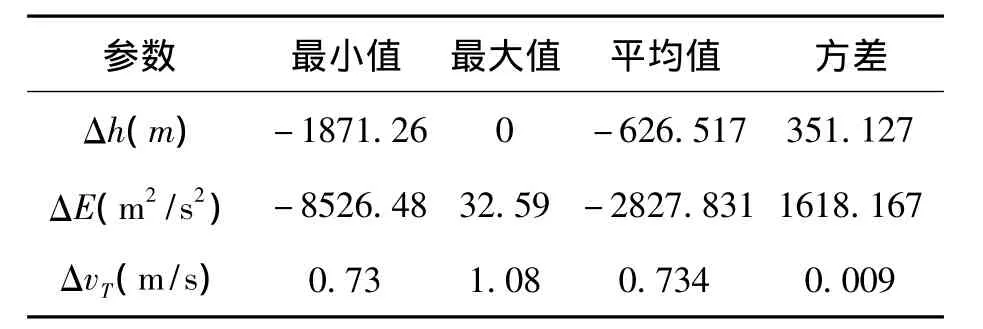
表2 轨道维持时主要控制参数统计Tab.2 Main control parameter statistics of orbitmaintenance
References)
[1] Krueger J K. Closesat:perigee-lowering techniques and preliminary design for a small optical imaging satellite operating in very low earth orbit[D].Cambridge:Massachusetts Institute of Technology,2010.
[2] 周伟勇,张育林,刘昆.超低轨航天器气动力分析与减阻设计[J].宇航学报,2010,31(2):342-348.ZHOU Weiyong,ZHANG Yulin,LIU Kun.Aerodynamics analysis and reduced drag design for the lower LEO spacecraft[J].Journal of Astronautics,2010,31(2):342-348.(in Chinese)
[3] Kuijper D,Matatoros M A G.Goce flight dynamics operations from an orbital perspective[J]. Journal of Aerospace Engineering,Sciences and Applications,2012,2(4):93-106.
[4] Atsushi N,Masanori H,Masayoshi U.The study of a super low altitude satellite[C].58th International Astronautical Congress,2007,IAC-07-D1.4.06.
[5] Van Allen,Richard E,James RW.NanoEye-amulti-mission low cost spacecraft[C].Reinventing Space Conference,Los Angeles,CA,May 7-11,2012.
[6] De Florio S,D'Amico S.Optimal autonomous orbit control of remote sensing spacecraft[C]//Proceedings of the 19th AAS/AIAA Space Flight Mechanics Meeting,Savannah,USA,2009:8-12.
[7] Canuto E. Drag-free and attitude control for the GOCE satellite[J].Automatica,2008,44(7):1766-1780.
[8] Masayoshi U,Atsushi N.Orbital maintenance of super low altitude satellite by new frozen orbit[C].The Meeting on the Study of Space Missions Propelled by Low-Thrust and Sustained Acceleration,Tokyo,Japan,Feb 28-29,2008.
[9] Salama O.Autonomous orbit maintenance law for LEO sun synchronous,earth repeating satelliteswith electric propulsion system[C].AIAA/AAS Astrodynamics Specialist Conference and Exhibit,Honolulu,Hawaii,USA,August18-21,2008.
[10] Fearn D G.Economical remote sensing from a low altitude with continuous drag compensation[J].Acta Astronautica,2005,56(5):555-572.
[11] Florio S D.Precise autonomous orbit control in low earth orbit:from design to flight validation[D].Glasgow:University of Glasgow,2013.
[12] 杨嘉墀.航天器轨道动力学与控制(上)[M].北京:中国宇航出版社,2005:196-198.Yang Jiachi.Spacecraft orbital dynamic and control(Volume 1)[M].Beijing:China Astronautic Publishing,2005:196-198.(in Chinese)
[13] 刘林,胡松杰.航天动力学引论[M].南京:南京大学出版社,2006:166-169.Liu Lin,Hu Songjie.An introduction to spacecraft orbital dynamic[M].Nanjing:Nanjing University Press,2006:166-169.(in Chinese)
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
天文学报(2021年5期)2021-10-09
中学生数理化·高一版(2021年11期)2021-09-05
新一代信息技术(2021年2期)2021-07-23
当代陕西(2020年15期)2021-01-07
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
现代防御技术(2016年1期)2016-06-01
钢管(2016年1期)2016-05-17
新高考·高一物理(2016年1期)2016-03-05
第二课堂(课外活动版)(2015年4期)2015-10-21