
红外热像仪MRTD测试方法研究
2015-04-03 09:09:39田留德刘朝晖赵建科赵怀学段亚轩龙江波
红外技术 2015年5期
田留德,刘朝晖,赵建科,赵怀学,潘 亮,段亚轩,龙江波,周 艳
红外热像仪MRTD测试方法研究
田留德1,2,刘朝晖1,赵建科1,赵怀学1,潘 亮1,段亚轩1,2,龙江波1,周 艳1
(1. 中国科学院 西安光学精密机械研究所,陕西 西安 710119;2. 中国科学院大学,北京 100039)
MRTD是评价热成像系统综合性能的重要参数。分析了热像仪参数测试系统的两种基本结构,比较各自的优缺点,给出了各自应用场所。研究了MRTD测试对热像仪参数测试系统各组成单元的具体要求。根据MRTD参数的特点,分析了引起MRTD测试结果一致性较差的原因,给出了相应的解决措施和修正方法。为验证解决措施和修正模型的正确性,以一个热像仪为例进行了MRTD测试,并将测试结果与该热像仪的出厂结果比对,测试结果偏差小于15%。实验表明,该修正模型可以提高MRTD测试结果的重复性和准确性。
热像仪;最小可分辨温差;测试方法;性能评价;修正模型
0 引言
红外成像技术已在军事和民用领域得到了较为广泛的应用,更灵敏、精密的红外成像系统对系统性能测试提出了更高的要求,测试技术必须适应红外技术的发展,因此红外成像系统的性能评价与测试变得越来越重要[1]。目前世界上一些国家提出了几种用来评价红外光电系统性能的模型,并建立了一套与之相适应的红外成像系统评估和测试的实验室测量系统。在红外热成像系统的多项性能参数中,由于MRTD既反映了系统的热灵敏度特性,又反映了系统的空间分辨力,它既能被热像仪的生产厂家测试也能够被热像仪的用户测试,因此成为综合评价红外成像系统性能的最主要参数[2]。作为一个主观参数,MRTD尽管看起来简单,但事实上MRTD测试是非常困难的,因为在测量过程中有很多容易犯的错误,这些错误会严重降低测试结果重复性和准确性。文献[3-4]指出:“在不同实验室的有经验人员之间,MRTD观察效果不一致,在0=1/2DAS处,差别达±30%,在高频渐近线处,可达±50%”。因此作为一种生产检验和产品验收的判断准则不够理想,分析和研究引起MRTD测试结果重复性和精度较差的原因,找出相应的解决措施是一个迫切需要解决的问题。本文分析了引起热像仪MRTD测试结果一致性和精度较差的主要原因。提高MRTD测量精度的措施有:①提高测试人员的技术水平,确保测试人员通过训练和培训且考核合格;②选择性能良好的测试系统,降低测试设备对测试结果的影响;③统一判断准则;④控制测试环境,修正环境温度对测试结果的影响。
1 热像仪参数测试系统结构
最初的热像仪是用于军事上观察远处的目标,成像距离较远,这类热像仪的测试通常使用以平行光管作为目标投影器的可变目标系统。目前,市场上有大量热像仪是用于近距离监视或非接触温度测量,因此可变距离测试系统也是需要的。据估计世界上超过90%的热像仪测试系统是可变目标测试系统,可变距离测试系统可以看作是其简化形式[5-6]。可变目标测试系统的一般结构如图1所示,系统主要由平行光管、黑体、目标靶、旋转靶轮、控制单元、图像采集单元、计算机及测试软件等部分组成。平行光管将焦平面上的目标靶的温度场分布投影到被测热像仪视场内,图像采集单元采集被测热像仪输出的图像,经过测试软件分析计算得到被测热像仪的性能参数。可变距离测试系统的结构如图2所示。没有平行光管,被测热像仪直接对目标靶进行成像。
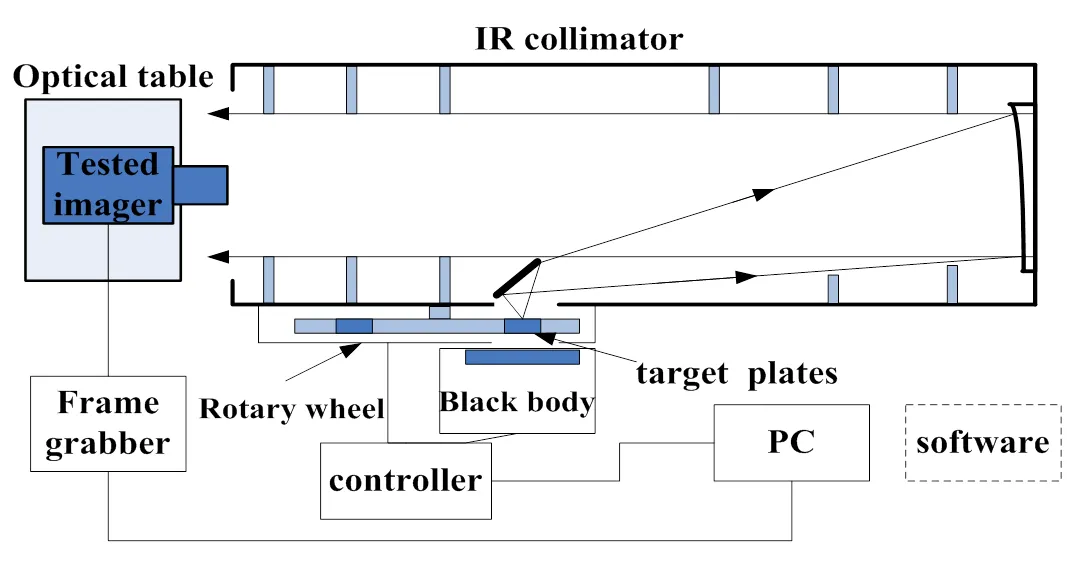
图1 可变目标测试系统结构图
可变目标测试系统可以完成任何类型的热像仪的测试,通常在实验室内使用,具有热稳定性好、测量精度高等优点,其缺点是被测热像仪的口径受限、价格较高。可变距离测试系统具有价格低、便携的优点,但是该系统仅能够测试工作距离较短的热像仪。
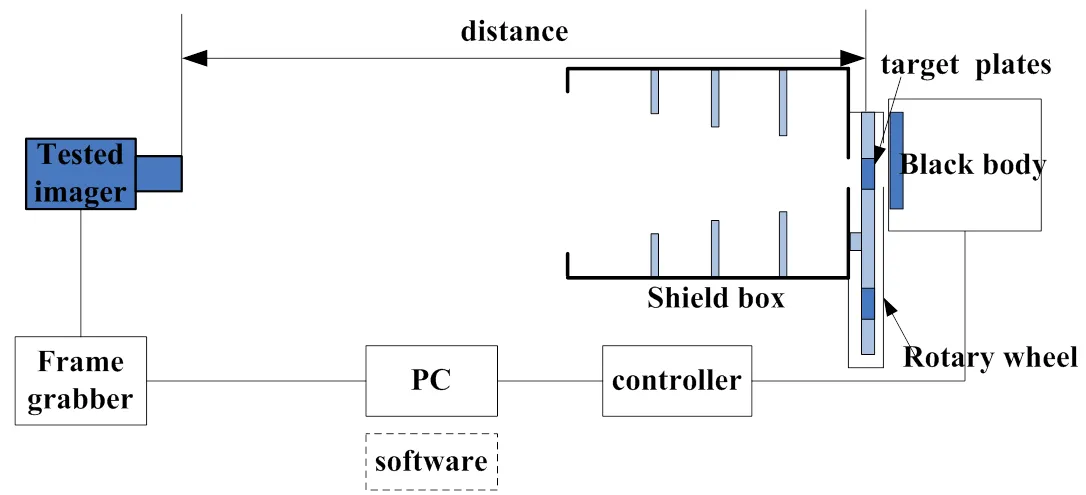
图2 可变距离测试系统结构图
2 测试对系统各模块的要求
为了实现对MRTD的精确测量,需要对测试系统各模块提出相应的要求。
2.1 平行光管
在热像仪测试系统中平行光管的功能是产生一个与平行光管焦面处目标靶相似的热场分布,所成像的畸变应可以忽略。对平行光管的要求主要体现在一下几个方面:分辨率,口径,光谱范围,热特性。
2.1.1 分辨率
平行光管的空间分辨能力应与被测热像仪的空间分辨能力相匹配。若平行光管的质量太差会带来较大的测量误差,质量太高的平行光管会带来不必要的成本。
平行光管的空间分辨率定义为平行光管映射的能被观测者分辨的靶板的最低频率。被测热像仪的分辨率是其奈奎斯特频率,它决定了热像仪的理论分辨率极限。为了使平行光管对被测热像仪成像质量的影响可以忽略,平行光管的分辨率至少为被测热像仪分辨力的5倍[7]。平行光管的空间分辨力不能够计算,但是能够测量。文献[8]给出了一种测量方法,因为反射式红外平行光管的几何像差不随光谱范围改变,选择在可见光波段测量平行光管的空间分辨率,测试点分布在目标靶所在范围内。
2.1.2 孔径/焦距
平行光管的孔径是平行光管能够产生的最大光束的直径。平行光管的孔径至少比被测热像仪光学孔径大10%。若该条件满足不了,将会产生额外的测量误差。用于热像仪测试的平行光管的F数变化范围大致是从5~12。这意味着具有相同孔径不同F数的平行光管的焦距变化范围非常大。低F数平行光管尺寸小,能够减小系统的体积,但是,低F数离轴平行光管在轴外点具有较大的几何像差,热稳定性也差。总之,如果需要尺寸小、系统集中则应选择低F数平行光管;如果需要整个视场内具有较好像质,则应选择高F数平行光管。
2.1.3 光谱范围
平行光管映射的黑体和目标靶的热辐射至少应包含被测热像仪的光谱范围,即应覆盖3~15mm,若该平行光管还要用于可见光相机测试,则其光谱范围应覆盖0.4~15mm。反射式平行光管的光谱范围是由反射镜的膜层确定的。铝膜具有反射率高、耐久性好和价格较低的优点,平行光管的主镜选用铝膜较好,但是铝膜工作在45°角时,在10mm波段反射率较低,因此平面镜反射镜应选择金膜或银膜。
2.1.4 热属性
在选择光学元件的材料时应考虑一下几个方面的因数:热膨胀系数、面型精度和价格。
若平行光管工作环境复杂多变(如野外),则应使用锗材料,至少使用耐热玻璃。若平行光管工作在环境温度相对稳定的实验室条件下,则可以利用任何一种红外玻璃材料,但是考虑到成本问题,光学冕牌玻璃是不错的选择。
2.2 黑体
在热像仪测试系统中,黑体是作为测量和标定热像仪性能参数的标准物质,黑体性能的优劣直接关系到热像仪参数测量结果的准确性。对黑体的要求体现在以下几个方面:温度分辨率、绝对温度范围、差分温度范围、发射率、稳定时间、均匀性、稳定性、温度绝对精度以及有效面积等,具体要求见表1。
2.3 旋转靶轮
旋转靶轮的主要功能是能够快速的更换目标。对旋转靶轮的要求如下:①使用具有良好热传导性的材料制造,与目标靶具有良好的热接触;②为了消除手动旋转靶轮对目标靶温度的影响,应选择机动旋转靶轮;③为了消除外界环境对目标靶及旋转靶轮温度的影响,应采取隔热措施;④旋转靶轮的定位重复性应优于1mm;⑤旋转靶轮表面应涂覆一层高发射率的膜层。
2.4 目标靶
测试热像仪的红外目标靶通常在金属板上精确刻画不同形状的孔来制造。用于热像仪参数测量的目标靶有十几种,其中最常用的主要有:四杆靶、圆孔靶、刀口靶、方孔靶、畸变靶等,各靶标用途如表2所示。
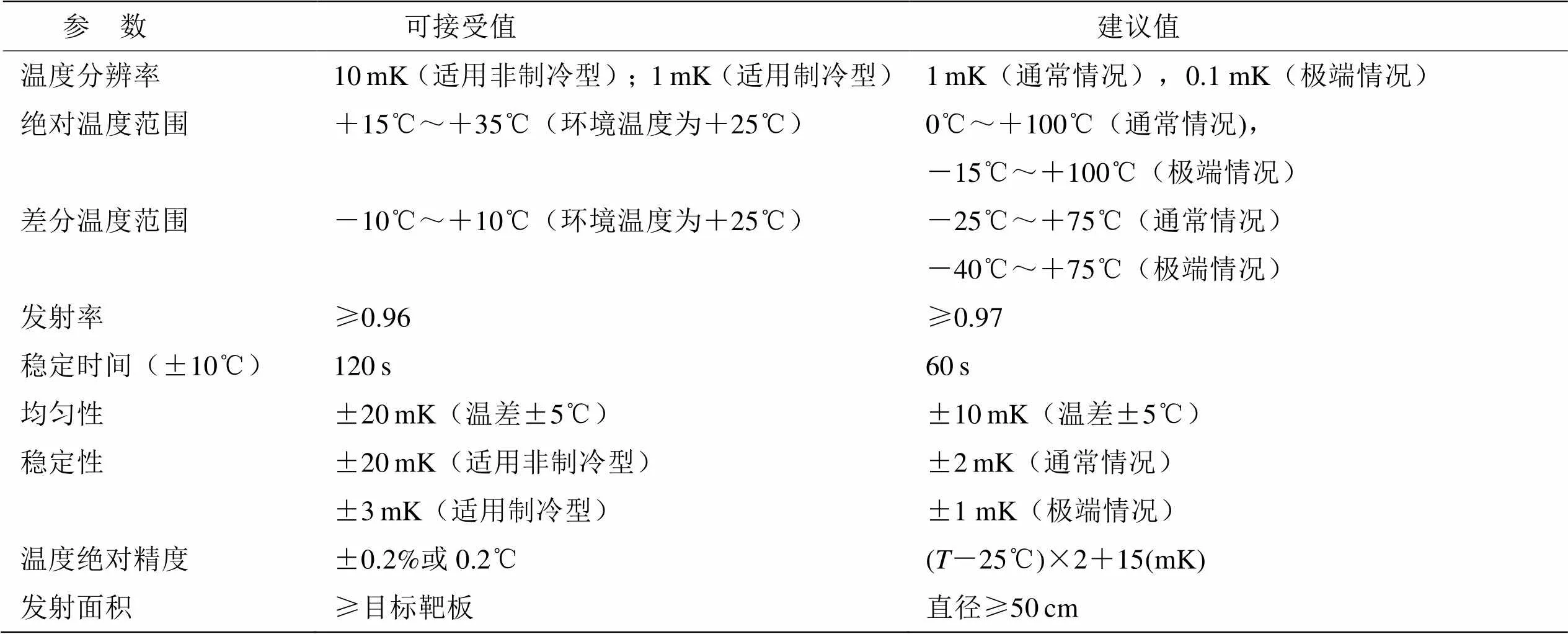
表1 热像仪测试系统对黑体辐射源的要求
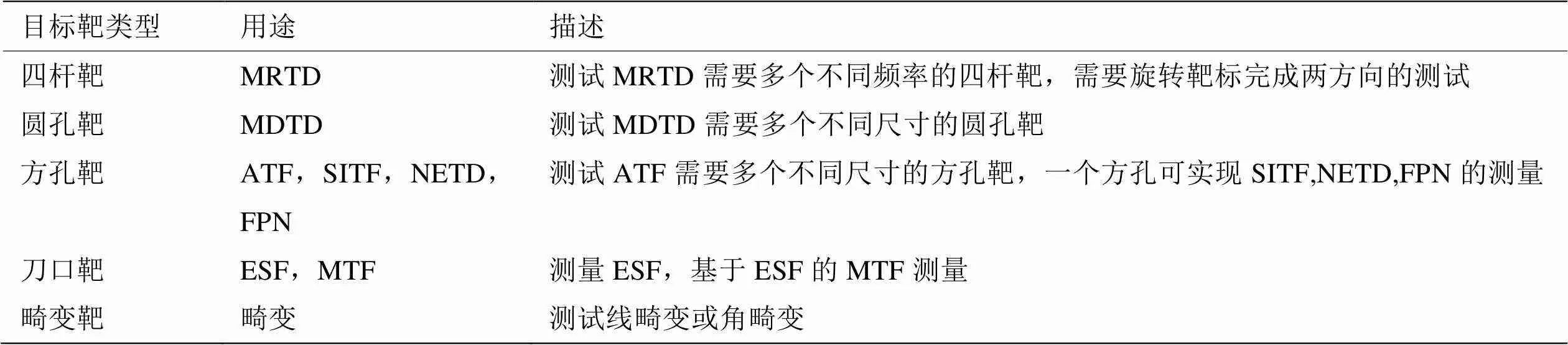
表2 不同类型红外目标靶的用途
制作红外目标靶是很非常困难的,原因如下:①为了使目标靶表面的温度均匀性为被测热像仪MRTD的若干倍,应选择热传导性好的金属(如铜或铜合金)制作,且目标靶不易太薄,建议大于0.3mm,否则会影响热传导性;②靶板必须具有高精度的几何尺寸,否则会降低测量精度,其几何尺寸偏差应小于2%;③目标靶面向被测热像仪的一面应镀有高发射率的膜层,使其具有和黑体一样的发射率,达到0.97;④为了减弱黑体温度对目标靶温度的影响,目标靶面向黑体的一面应镀高反射率的膜层或则抛光,使其反射率大于0.9。
2.5 图像获取和分析模块
图像的采集和分析模块主要由计算机,图像采集卡和测试软件组成。
2.5.1 图像采集卡
图像采集卡的主要功能是获取热像仪输出的图像序列,为进一步的分析和处理提供原始数据。理想的图像采集卡应能够接收多种标准图像制式的数据:如PAL制、NTSC制、火线、USB 2.0、Camera Link,GigE,LVDS。其次,经过图像采集卡采集后,图像的质量应无明显的降低。
2.5.2 计算机
计算机应能够处理从图像采集卡输入图像数据和其它参数信息,得到被测热像仪的参数。
2.5.3 测试软件
在热像仪测试系统中,测试软件主要功能为:通过计算机实现对测试系统硬件模块的控制及热像仪性能参数的计算和显示。对测试软件要求如下:①以简单易学,图形化界面的方法控制黑体的温度和旋转靶轮的位置;②给MRTD、MDTD的测量提供软件支撑,如:存储测试条件,完成目标靶宽度到频率的转换,自动插入当前黑体温度到测试表格,校正环境温度及平行光管透过率对测试结果的影响,以图像或表格的形式显示和保存测量结果;③与不同类型的图像采集卡协作以无压缩方法或不会降低图像质量的压缩方法获取不同格式的图像数据。
2.6 其他模块
还有一些模块不是热像仪测试必须的,但是又非常重要,如温度箱和光学平台。
为了验证热像仪在不同环境温度下的性能及可靠性,需要一个热惯量较小、具有红外传输窗口的温度试验箱,该试验箱的温度范围应与被测热像仪工作温度范围相匹配。
其次,在进行高空间分辨率热像仪测试时,需要将整个测试系统放置在抗振动的光学平台上以消除振动对测量结果的影响。
3 最小可分辨温差测量
MRTD的主观测量方法是一个非常耗时的过程。使用客观测量方可以缩短测试时间,但是,由于在客观测试之前需要对同一类型的热像仪进行大量的MRTD主观测量,从而确定系统参数。这一要求使得MRTD客观测量仅仅在大量同一型号的热像仪需要测试时有优势,客观测量法适合于热像仪生产厂家使用。MRTD客观测量法主要由:MTF法、光度法和图像识别法,此处不详细介绍。
3.1 影响MRTD测量结果的因素
MRTD的主观测量通常采用多名观察员(3名以上)进行独立测量,取多次测量结果的平均值,理论上可以消除不同测试人员视力及判据不同带来的差异,实验结果表明,多个不同测试团队对同一热像仪的MRTD测量结果的偏差高达50%是很常见的。导致这一结果的原因主要有两个:①测试组人员的水平差异;②测试时使用的测试设备、判断准则、观察环境条件及测试流程的差异。
3.1.1 测试人员
从事热像仪MRTD测试的应当是视力没有问题,通过专门的训练和培训且考核合格的人员。这些测试人员已经从事过热像仪工作数百小时适应了热像仪的各种噪声,他们在噪声环境下发现和识别低对比度目标的能力已经得到证实,且测试结果的重复性和稳定性较好。MRTD测试人员的训练可以用一系列市场的真实的热像仪来完成,也可以靠计算机仿真软件来完成。
3.1.2 判断准则
在MRTD测试中关于四杆靶能否分辨标准不统一。标准中表述为:在确定的空间频率下,4位观察者中不少于3位恰好可看见每杆面积的75%和两杆间面积的75%时的温差,就是该空间频率下的最小可分辨温差。文献[9]和文献[10]则表述为:在确定的空间频率下,观测者刚好能分辨出(50%概率)4条带图案时,目标与背景的温差就是该空间频率下的最小可分辨温差。国外文献普遍接受的准则为:当观察者能够辨认出目标图像的确有4个杆状目标时,则可以认为他能够分辨该四杆靶目标,此处不要求目标一直能辨认,目标可以时而被噪声掩盖时而显现,该目标靶像可以带有畸变,其中的一两个靶可以比其他靶宽。
3.1.3 测试环境
测试环境像环境照度、温度可能对测量结果带来较大影响。通常认为:MRTD测试时的环境照度条件应当和被测热像仪的正常工作环境相似。标准建议的环境温度是20±2℃。如果测试是在其它温度条件下进行的,应当对测试结果进行修正。
3.1.3.1 环境温度的影响与修正
环境温度对测量结果的影响可以通过将测试结果乘以一个确定的系数来修正。对于非制冷热像仪,可以近似认为热像仪噪声不随环境温度变化,则修正系数可以用公式(1)计算:

式中:ba是测试时的环境温度;bas是标准规定的测试环境温度;(,)是温度为的黑体在波长的辐射出射度;sys()是被测热像仪的相对光谱响应;D是被测热像仪的响应谱段。
对于制冷型热像仪,可以假设热像仪为背景限红外探测器,则修正系数可以用公式(2)计算:
按公式(3)修正环境温度的影响:
MRTDcor=MRTDm×cor(ba) (3)
式中:MRTDcor修正后的结果;MRTDm是原始的测量结果;cor(ba)为环境温度的修正系数。
3.1.3.2 光学透过率的影响与修正
透过率的影响可以将测试结果乘以光学通道的透过率来修正。对于可变目标测试系统,因为测试系统和热像仪之间的距离非常近,大气对辐射传播的影响可以忽略,光学通道的透过率等于平行光管的透过率。平行光管的透过率和光谱范围有关,因此,应获得感兴趣的光谱范围的平行光管透过率。对于可变距离测试系统,没有平行光管,但是热像仪和测试系统之间距离较远。若大气条件良好,距离小于100m,大气透过率近似为1,不需修正。若目标与测试系统的距离更远或者测试在较坏的大气条件下进行,大气透过率应该进行计算并修正对测试结果的影响。透过率影响的修正按公式(4):
MRTDcor=MRTDm×(4)
式中:MRTDcor为修正后的结果;MRTDm为原始的测量结果;为光学通道的透过率。
3.1.4 目标靶
MRTD是与目标空间频率有关的温差的连续函数。事实上,MRTD的测量仅仅在几个频率点进行,其中必须包含低频、中频和高频的频率点。对于凝视型热像仪最小目标的空间频率应该在奈奎斯特频率附近。可变目标测试系统和可变距离测试系统的四杆靶空间频率的计算分别如公式(5)和(6):


式中:是四杆靶的空间频率;¢为平行光管的焦距;是测试系统与被测热像仪的距离;是四杆靶的一个杆的宽度。
国家标准建议使用单四杆靶进行MRTD测量,通过旋转实现水平方向、垂直方向的测量。使用单四杆靶可以帮助观察者集中注意力,但是,实际测试经历表明,双四杆靶(一个垂直四杆靶一个水平四杆靶)并不降低MRTD的测量精度,反而可以加速MRTD的测量过程。
3.1.5 偏置
当分辨同一空间频率目标靶所需的最小正温差和最小负温差不相等时,则系统偏置存在。国际标准建议:在进行MRTD测量时,首先使用正温差的目标靶测试,然后使用负温差的目标靶测试,最后将两测试结果平均。目的是校正系统偏置对MRTD测量结果的影响。造成系统偏置的因素有多种:①目标温度测量精度不高;②目标靶和黑体发射率有差异;③黑体表面温度均匀性不高。若仅仅使用正温差的目标靶,则系统偏置将会带来严重的测量误差。在测试环境较好,测试系统比较稳定时,事先对系统偏置进行标定,并作为修正因子对正温差的目标靶测试结果修正,可以加快MRTD的测量过程。系统偏置的计算如公式(7):
式中:D+为识别目标靶的最小正温差;D-为识别目标靶的最小负温差。
3.2 MRTD的测试及实验
MRTD测量方法有两种:①固定空间频率,改变温差;②固定温差,改变空间频率。对于可变目标测试系统,只有第一种方法可行;而对于可变距离测试系统这两种方法均可行,第二种方法更适用。第一种方法的优点是利用测试软件实现了温差和空间频率的半自动控制,测试可在较小的空间内进行,但是测试频率受四杆靶的限制。第二种方法具有需要改变被测热像仪和测试系统之间的距离,需要较大的空间,但其优点是测试可以在任何空间频率进行。
3.2.1 MRTD测试步骤
1)根据被测热像仪参数,确定测试的频率点,并安装目标靶;
2)将测试的最低频率目标靶旋转到测试靶位,调高目标背景温差,设置被测热像仪参数使观测效果达到最佳,记录热像仪参数、环境温度等参数;
3)逐步减小目标背景温差,直到4杆靶像马上就不能被分辨时,记下此时的温差D+;
4)逐步降低黑体温度,使黑体温度小于背景温度,使冷杆出现,记下刚好能分辨4杆靶时的温差D-;
5)则热像仪在该频率的最小可分辨温差为:

6)按空间频率由低到高的顺序,对另一空间的四杆靶重复步骤3)~5);
7)绘制MRTD()曲线。
3.2.2 MRTD测试实验
利用上述测试步骤及修正模型对某一热像仪进行MRTD测试,该热像仪的参数为:工作波段为8~12mm,视场为2°×1.5°。由3名合格的观察员进行测试,测试的环境温度为16℃,平行光管透过率为0.94。将测试结果与厂家测试结果比对,最大偏差小于15%,具体测试结果如图3所示。
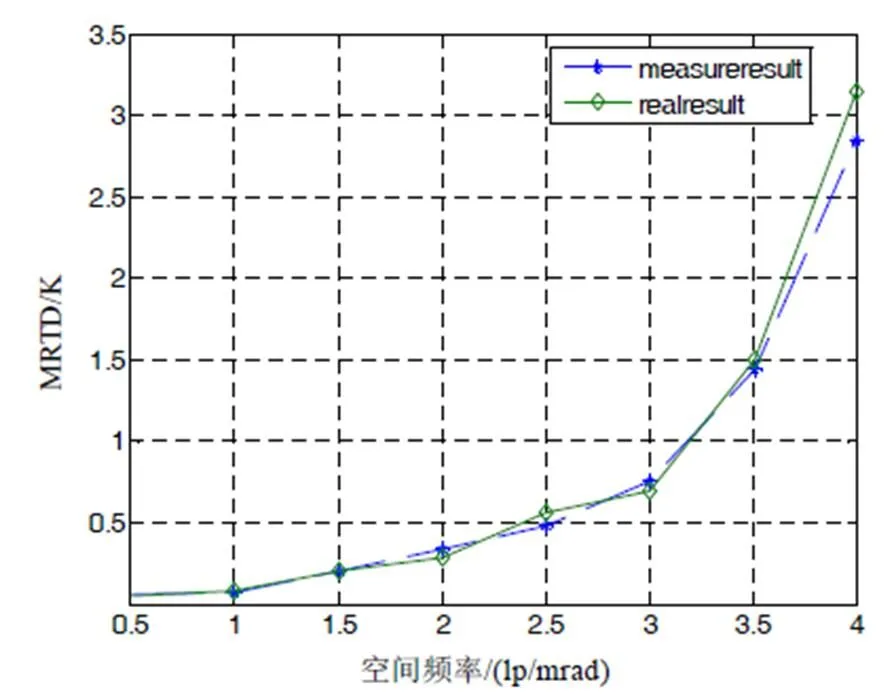
图3 MRTD测试结果
4 结论
分析了热像仪参数测试系统的两种基本结构,给出了各自的优缺点和应用场所。给出了对热像仪测试系统各组成单元的具体要求。给出了影响MRTD测量精度因素及相应的解决措施及修正方法。最后以某一热像仪为例进行MRTD测试,将测试结果与出厂测试结果比对,表明文章中的解决措施和修正模型可以提高MRTD测试结果的准确性。
[1] 蔡毅, 王岭雪. 红外成像技术中的9个问题[J]. 红外技术, 2013, 35(11): 671-682.
CAI Yi, WANG Ling-xue. Nine issues associated with infrared imaging technology[J]., 2013, 35(11): 671-682.
[2] 范心田, 卢振武, 孙强. 红外成像系统中MRTD测试方法的研究[J]. 红外与激光工程, 2004, 33(5): 445-448.
FAN Xintian, LU Zhenwu, SUN Qiang. Measurement method for MRTD of infrared imaging system[J]., 2004, 33(5): 445-448.
[3] 宋敏敏. 红外系统作用距离与影响关系因素的研究[D]. 南京: 南京航空航天大学, 2010: 24-25.
Song Minmin.The research of the relationship between infrared system distance and the impact of the factors[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2010: 24-25.
[4] 陈琛, 张晓晖, 郭虎生.红外热像仪MRTD自动检测方法研究[J]. 红外技术, 2010, 32(9): 509-512.
CHEN Chen, ZHANG Xiao-hui, GUO Hu-sheng. Research on minimum resolvable temperature difference automatic test method of the thermal imaging system[J]., 2010, 32(9): 509-512.
[5] Krzysztof Chrzanowski.[M /CD]. Poland:Military University of Technology, 2010.
[6] Gerald C Holst. Testing and evaluation of infrared imaging systems[M], Optical Engineering Press, 1998.
[7] Krzysztof Chrzanowski, Lee H C, Wrona W. A condition on spatial resolution of IR collimators for testing of thermal imaging systems[J]., 2000, 39(5): 14137-1417.
[8] Krzysztof Chrzanowski. Evaluation of IR collimators for testing of thermal imaging systems[J]., 2007, 15(2): 82-87.
[9] 钟文辉. 红外焦平面热成像仪参数测试系统[J]. 红外, 2006, 27(6): 29-34.
ZHONG Wenhui. Parameter Testing System for Infrared Focal-Plane Thermal Imaging Systems[J]., 2006, 27(6): 29-34.
[10] 李云红, 孙晓刚, 廉继红. 红外热像系统性能测试研究[J]. 红外与激光工程, 2008, 37: 增刊: 458-462.
LI Yunhong, SUN Xiaogang, LIAN Jihong. Research on performance testing of thermal infrared imaging system[J]., 2008, 37(supplement): 458-462.
Measurement Method for MRTD of Infrared Imaging System
TIAN Liu-de1,2,LIU Chao-hui1,ZHAO Jian-ke1,ZHAO Huai-xue1,PAN Liang1,DUAN Ya-xuan1,LONG Jiang-bo1,ZHOU Yan1
(1.,,710119,; 2.,100039,)
MRTD is an important parameter to evaluate the comprehensive performance of thermal imaging systems. The structure of two common test systems for testing thermal imagers is analyzed, whose advantages and disadvantages are compared and their application is given.The specific requirements on each part of test system are studied. According to the characteristics of MRTD, the causes of MRTD test result’s poor uniformity is analyzed, and the corresponding solution and correction model are given. In order to test and verify the correctness of the solution and correction model, a thermal imager is used as an example for MRTD testing. Compared with the test results of manufacturer, the maximum deviation is less than 15%. The test results show that the correction model can improve repeatability and accuracy of MRTD test results.
infrared imaging,MRTD,measurement method,performance evaluation,correction model
TN216
A
1001-8891(2015)05-0368-06
2014-11-21;
2014-12-16.
田留德(1984-),男,工程师/博士研究生,主要从事光电测量设备研制、精密检测研究。E-mail:tianliude@126.com。
中国科学院创新基金,编号:Y154451ZZ0。
猜你喜欢
科学技术与工程(2023年22期)2023-08-23 07:17:58
机电工程技术(2021年6期)2021-07-25 15:46:54
上海交通大学学报(2020年4期)2020-05-07 09:38:42
中国中医眼科杂志(2016年6期)2016-04-08 06:53:00
红外技术(2016年6期)2016-03-15 06:47:22
现代食品(2015年16期)2015-12-20 09:07:14
重庆建筑(2015年12期)2015-11-19 07:32:48
设备管理与维修(2014年12期)2014-12-25 01:49:06
山西建筑(2014年36期)2014-08-08 02:13:37
电脑知识与技术(2014年16期)2014-07-28 05:22:45
