电容式滑觉传感器设计与应用*
2015-04-01 12:19:10许德成郭小辉
传感器与微系统 2015年11期
许德成,郭小辉
(1.吉林师范大学 信息技术学院,吉林 四平136000;2.合肥工业大学 电子科学与应用物理学院,安徽 合肥230009)
0 引 言
机器人滑觉传感技术是实现智能机器人的关键技术之一,触觉传感器是机器人与环境直接作用的必须媒介[1,2],是模仿人手使之具有感知功能实现软抓取的关键环节,滑觉信息的可靠感知是机器人在复杂多元环境下完成预定抓取功能的可靠保障[3]。常用的触觉传感器按被测物理量主要可分为电阻式[4~6]、电容式[7,8]、光电式[9]、压电式[10]等。电阻式滑触觉传感器存在体积大、不易集成且力敏电阻漏电流不稳定等缺点。光电式滑觉传感具有结构简单、设计合理及抗电磁干扰能力强等优点,但光电式滑觉传感器在两向力以上共同作用时,很难保持线性关系,且存在标定困难、精度难以提高等不足。压电式滑触觉传感器的应用最为广泛,能同时检测滑觉信息与触觉信息,然而滑觉信息与触觉信息的分离存在一定难度,且压电式滑触觉传感器同时存在压电响应与热电响应,此外,压电式滑触觉传感器无法实现对静态触觉信息的感知。
本文提出的电容式滑觉传感器因具有动态范围广,良好的线性响应,动态响应快、结构简单等显著优点而得到广泛应用。
1 滑觉传感器设计
1.1 结构设计与感知机理
电容式滑觉传感单元结构示意图如图1 所示,每只电容式滑觉传感器可等效为由四对互成直角排列的差分式电容器构成,从而提高了滑觉传感的灵敏度。本文选用美国道康宁产生的PDMS 为滑觉传感器的柔性基体,YC—2型有机硅导电银胶(南京喜力特胶粘剂有限公司)作为差分式电容的两端固定极板和中间可动极板,同时,在滑觉传感器上表面附有半球形触头以利于滑觉感知。YC—2 型有机硅导电银胶常温下固化后具有良好的延展性、成膜性好等优点,使得电容式滑觉传感单元整体具有柔性,为“软”抓取功能的实现提供了可能性。

图1 滑觉传感单元结构示意图Fig 1 Structure diagram of slip sensing cell
电容式滑觉传感器实现滑觉检测机理如图2 所示,未受摩擦力作用时,4 对差分式电容器输出值相等(C11=C12,C21=C22,C31=C32,C41=C42),当受摩擦力作用时,防滑橡胶触头在摩擦力带动下发生倾斜,从而联动4 对差分式电容器的可动极板发生倾斜,导致4 对差分式电容器输出发生变化,根据4 个电容值的变化特点可以判断滑动的方向和滑觉信息,且其检测方向不再是单一方向。图2(a)为沿X 轴正方向发生滑动时各电容变化示意图,可以看出此时C12-C11和C32-C31输出增加,C42-C41和C22-C21几乎不变(随着位移增加,会有减小趋势),沿Y 轴时原理类似;图2(b)为沿与X 轴正方成45°向发生滑动时各电容变化示意图,此时C12-C11,C42-C41,C32-C31和C22-C21(均表示绝对值)输出均增加,根据每个电容值的变化可以判断滑动产生的方向性。

图2 触觉感知机理Fig 2 Mechanism of tactile perception
为进一步验证文中提出电容式滑觉传感器检测机理的可行性,使用ANSYS 有限元仿真软件进行验证,分别对其沿X 轴正方向和沿与X 轴正方成45°方向发生滑动,其仿真结果如图3 所示,可以看出ANSYS 对4 个差分式电容的变化仿真结果与上述感知机理分析结果保持一致。
1.2 滑觉传感器制备

图3 电容式滑觉传感器受摩擦力作用时仿真结果Fig 3 Simulation results of capacitive slip sensor under frictional force
电容式滑觉传感器制作工艺主要是基于3D 打印技术与硅橡胶流体成型技术,利用SolidWorks 或AutoCAD 等三维建模软件设计出电容式滑觉传感器结构所需各部分模具,设计中使用XLFDM211515 型3D 打印机设计传感器模具,并将硅橡胶注入模具成型,待材料固化后脱模取出即得电容式滑觉传感器各部分组件,最后将各个器件组装到一起即可。图4 为本文3D 打印机实物图和制备电容式滑觉传感器所需(部分)模具,具备传感结构与制备工艺简单、成本低等优势。

图4 3D 打印机与滑觉传感器模具Fig 4 3D printer and moulds of slip sensor
2 触觉感知系统
2.1 系统整体结构
文中使用AD7147—1 型电容/数字转换器(CDC)对电容式滑觉传感器输出电容信息进行采集,其具有多路容性转换通道、16 位转换精度,片内采用有源交流屏蔽技术有效地降低杂质电容,可灵活构建电容式滑觉信息感知系统。系统框图如图5 所示,选用低功耗CC2530 为微控制器,终端节点与滑觉传感单元构成一体化便携结构,采集滑觉传感器输出的容性触觉信息并以无线方式发送至协调器,协调器接收滑觉信息后通过串口于LabVIEW 上位机进行滑觉力信息的实时显示。
2.2 容性滑觉感知
电容式滑觉阵列传感器信号采集系统软件负责采集容性滑觉信息并以无线方式发送至协调器,协调器接收下位机数据包后通过串口于LabVIEW 上位机进行力信息的实时显示。主要包括下位机对电容信号的提取、发送和上位机接收数据并实时图形化显示两部分。其中,上位机开发选取NI(National Instruments)公司的图形化编程开发平台,LabVIEW 具备强大的实时数据处理功能与显示功能,其内部自带的函数库能较方便对数据进行更高级的运算和处理,很大程度上提高了测试效率[11]。

图5 电容式滑觉传感器滑觉感知系统框图Fig 5 Block diagram of slip perception system of capacitive slip sensor
微控制器程序流程图如图6(a)所示,控制器完成一次阵列扫描后按预定通信协议格式将数据打包发送至上位机。上位机程序流程图如图6(b)所示,LabVIEW 接到下位机发送的数据包,解析数据包并判断无误后显示实验结果。
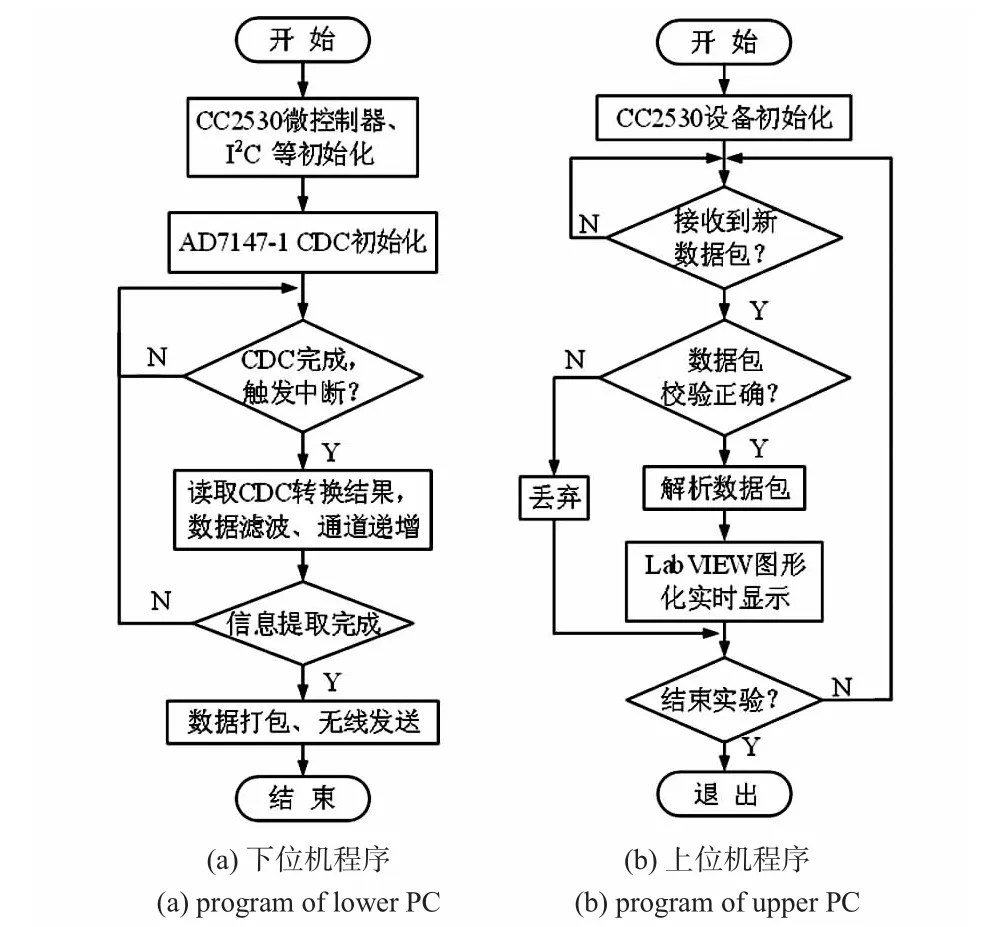
图6 程序流程图Fig 6 Flow chart of program
3 实验与讨论
3.1 传感器输出特性
图7 和图8 分别为沿X 轴正方向与Y 轴正方向进行切向加载测试时,各差分电容器的输出与切向力之间的特性关系。
为验证其滑觉检测的多方向性,当沿与X 轴正方向呈45°斜向上施加切向力,其差分电容器输出曲线如图9,通过上述输出特性曲线,可以看出,差分电容器在不同方向的输出电容具有良好的线性度,且与滑觉感知机理分析保持较好的一致性。
3.2 标定与误差分析

图7 X 轴方向滑觉传感器输出特性Fig 7 Output characteristics of slip sensor in X axis

图8 Y 轴方向滑觉传感器输出特性Fig 8 Output characteristic of slip sensor in Y axis

图9 与X 轴方向呈45°滑觉传感器输出特性Fig 9 Output characteristic of slip sensor in 45°direction with X axis
依据电容式滑觉传感器的输出与滑动力之间的关系便可反演出所受压力值,对电容式滑觉传感器进行标定实验其误差如图10 所示。

图10 电容式滑觉传感器的误差Fig 10 Error of capacitive slip sensor
从图10 可知:本文提出的电容式滑觉传感器相对误差均低于8%(均在8%误差带内),该电容式滑觉传感器具有较好的检测准确度,具备良好的滑觉感知能力。
图11 为电容式滑觉传感器应用于滑觉检测时输出结果,通过差分电容的输出特性曲线可以看出:滑动发生于X轴正方向。
通过对电容式滑觉传感器的输出特性实验和滑觉检测感知等说明了电容式滑觉传感器具有线性度好、滑觉检测灵敏等特点,可穿戴于智能机器人实现“软”抓取功能,为安全人机交互提供了一种可行性方案。
4 结 论
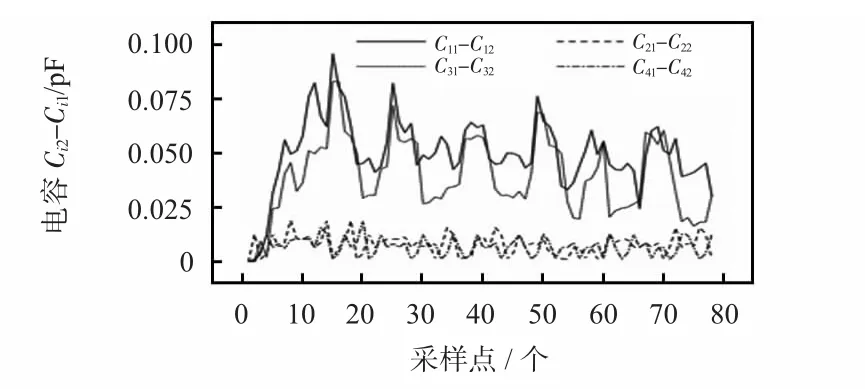
图11 电容式滑觉传感器检测滑动信号时实验结果Fig 11 Experimental result of sliding signal detected by capacitive slip sensor
本文提出了一种可以用智能机器人仿生皮肤的电容式滑觉传感器,阐述了电容式滑觉传感器的结构设计、滑觉感知机理以及构建容性滑觉感知系统,并借助ANSYS 有限元仿真软件进行滑觉感知机理验证。本电容式滑觉传感器可等效为4 只差分式电容器,提高了其检测灵敏度。其滑觉检测方向不再局限于单一方向,根据差分电容式滑觉传感器输出电容值变化的特点可以判断滑觉发生的方向。同时,电容式滑觉传感器极板引线可引至柔性基体面,易于构成电容式滑觉传感器阵列,实现大面积、高分辨率滑觉感知功能。
[1] Hammock M L,Chortos A,Tee B C K,et al.The evolution of electronic skin(E-Skin):A brief history,design considerations,and recent progress[J].Advanced Materials,2013,25(42):5997-6038.
[2] 黄 英,郭小辉,刘家俊,等.可拼接式全柔性电容触觉阵列传感器设计与实验[J].机器人,2015,37(2):136-141,151.
[3] 胡燕清,陈进军,胡国清.一种声电式滑觉传感器的实现与测试[J].传感器与微系统,2011,30(3):128-131.
[4] Park J,Lee Y,Hong J,et al.Tactile-direction-sensitive and stretchable electronic skins based on human-skin-inspired interlocked microstructures[J].ACS Nano,2014,8(12):12020-12029.
[5] 郭小辉,黄 英,袁海涛,等.柔性复合传感器阵列信号采集及温度补偿系统[J].电子测量与仪器学报,2014,28(11):1254-1261.
[6] 田合雷,刘 平,郭小辉,等.基于导电橡胶的柔性压力/温度复合感知系统[J].传感器与微系统,2015,34(10):100-103.
[7] 许德成,高永慧,郭小辉.一种全柔性电容式触觉传感器设计与试验[J].江苏大学学报:自然科学版,2015,36(3):337-342.
[8] 郭小辉,黄 英,腾 珂,等.柔性温度压力仿生皮肤的模块化设计与实现[J].机器人,2015,38(5):1-6.
[9] White M S,Kaltenbrunner M,Głowacki E D,et al.Ultrathin,highly flexible and stretchable PLEDs[J].Nature Photonics,2013,7(10):811-816.
[10]Schoepfer M,Schuermann C,Pardowitz M,et al.Using a piezoresistive tactile sensor for detection of incipient slippage[C]∥2010 41st International Symposium on Robotics(ISR),and 2010 The 6th German Conference on Robotics(ROB),2010:1-7.
[11]刘 亚,罗志会,徐校明,等.基于LabVIEW 的三轴微弱磁场检测系统[J].传感器与微系统,2015,34(7):73-75,78.
猜你喜欢
海外星云(2021年6期)2021-10-14 07:20:42
电子制作(2019年10期)2019-06-17 11:44:58
电子测试(2018年18期)2018-11-14 02:30:28
传感器与微系统(2018年7期)2018-08-29 00:44:40
特别健康(2018年3期)2018-07-04 00:40:20
工业设计(2016年4期)2016-05-04 04:00:20
电测与仪表(2016年24期)2016-04-12 00:21:06
中国光学(2015年5期)2015-12-09 09:00:42
电测与仪表(2015年20期)2015-04-09 11:53:54
中外健康文摘B版(2014年8期)2014-06-27 06:33:03