
基于FPGA 的导流叶片角度数字化测量系统
2015-04-01 12:18杨纪明周章文
传感器与微系统 2015年10期
潘 瑨,杨纪明,周章文
(空军工程大学 航空航天工程学院,陕西 西安710038)
0 引 言
发动机可调导流叶片角度是航空发动机控制系统的重要参数,测量方法和系统的设计对控制系统的数字化和其他参数测量的移植性有着很大的影响[1,2]。由于自整角机能在较为苛刻的环境条件下工作,而且具有很高的准确度,所以,在军事角度测量中得到了广泛应用,如火炮、雷达以及发动机等角度测量及控制系统中[3]。对自整角机进行信号采集的方法主要有格雷码法和A/D 变换的采集法。前者跟踪速度快、成本低,但是精度较差;后者是目前研究的热点,本文采用两相法进行测量[4]。
现有的利用自整角机测量角度的系统多数使用单片机技术[5]、数字信号处理器(DSP)或者是模拟式转换电路[6],这些测量方法或者装置功能单一,不适合对航空发动机控制系统其它参数数字化测量的扩展,从而造成控制器单元的冗余、功耗增高和硬件电路的复杂化。
针对某型航空发动机控制系统参数数字化测量的要求,本文使用自整角机作为角度测量装置,并利用现场可编程门阵列(FPGA)技术和等精度测频的方法进行数据测量,以提高测量精度和方便其他数据端口的扩展,加快发动机控制器的更新换代。
1 系统原理与总体设计
航空发动机可调叶片角度测量系统设计框图如图1 所示。系统由自整角机、信号采集与处理电路、FPGA 处理器、主控制器和显示及监控窗口组成。自整角机主要是将发动机可调叶片的角度信号转变为电压信号;信号处理电路主要进行信号的交流/直流转换和电压/频率转换。此外,利用FPGA 芯片作为主处理器,可以方便对其他发动机信号的扩展,并且测量速度快,采用其内部自带的UART 模块可以有效与发动机主控制器进行数据交换,同时,经FPGA 处理过的数据可以在数码管上显示或者传输给上位机进行系统测试与监控。

图1 系统总体框图Fig 1 Overall block diagram of system
2 系统硬件电路设计
2.1 自整角机及其测量原理
本系统采用自整角机作为转角传感器,其发送机为整步绕组。基于A/D 变换的采集方法为两相法。图2 中三相绕组中的感应电势表示如下

其中,u10,u20,u30分别为线圈三相电压,ωt 为叶片的转角α。将3 角接地,则有以下结果

其中,A 为电压系数,与传感器结构和负载有关;u1和u2分别为所测得的传感器相间的线电压。由式(2)可得

通过测量1 点和2 点电压,计算可得到可调叶片转角。
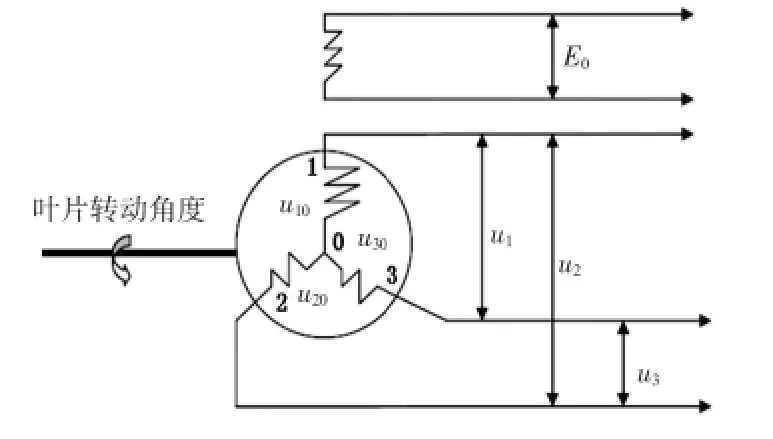
图2 角度测量原理图Fig 2 Measuring principle of angle
2.2 信号处理电路
信号处理电路的主要作用是将来自自整角机的电压信号进行处理,使之与接口电路电气上相匹配,便于处理器的接收。经处理后的形式一般是处理器能直接接口的电压、频率或者符合一定通信协议的数字信号。信号处理电路框图如图3 所示。
导流叶片角度测量范围0°~120°,由式(2)和三角函数有关知识可得,为消除两个角度对应一个计算结果的影响,在后续的计算中需要判断角度是大于90°还是小于90°,测量原理图如图3 所示。来自自整角机的电压信号经过相同的降压缓冲电路后,将u1和u2信号(来自自整角机交流信号)经交流/直流转换器芯片AD637 转换为直流信号,然后再经过电压/频率转换器AD652SA 转换为频率信号后输入到FPGA 控制芯片中。其中,交流/直流转换电路和电压/频率转换电路分别如图4 和图5 所示。

图3 信号处理电路Fig 3 Signal conditioning circuit

图4 交流/直流转换电路Fig 4 AC/DC conversion circuit

图5 电压/频率转换电路Fig 5 V/F conversion circuit
2.3 FPGA 主控芯片模块设计
FPGA 主控芯片处理器采用ACTEL 公司的芯片A3P1000 作为控制核心,负责待测数据信号的测量、控制系统各部分控制信号的产生以及与主控制器、上位机的通信等功能。片内各个功能模块通过VHDL 语言进行编写生成,同时利用UART 模块将计算数据传输给主控制器或者与上位机进行串行通信。与上位机通信串口为RS—232,波特率设为115 200 bps。
RS—232 通信时,串口要求为负逻辑电平,而处理器为数字信号,这就使得电平不兼容,无法正常通信。因此,采用MAX3232 电平转换芯片来实现电平的过渡。该芯片左边直接与FPGA 引脚相连,进行3.3 V 数字通信,右边直接与计算机串口相连。
3 系统软件设计
3.1 等精度测频模块
系统测量频率时采用等精度测频法,因为这种方法对高频信号和低频信号的测量精确度较高,其原理图如图6所示。一次完整的测量过程如下:当预置闸门信号上升沿到来时,计数器未开始计数,而是当被测信号也到了上升沿(即实际闸门信号上升沿)才开始计数;而当预置闸门下降沿到来时,计数器也不会立即开始计数,而是等到被测信号下一个上升沿到来(即实际闸门下降沿)时才停止计数[7]。
若令实际闸门时间为T,计数器A 计数结果为Nx,计数器B 计数结果为Nc,基准信号频率为f,则被测信号的频率值为

图6 等精度测量原理Fig 6 Equal precision frequency measurement principle
3.2 控制信号发生模块
频率发生模块的作用是产生FPGA 芯片中各个模块所需的频率,该模块设计中最主要的是产生UART 控制模块中数据选择开关的时序信号(CLK)和串行通信模块的写使能信号(WEN)。根据系统每隔20 ms 测量一次数据、与上位机进行通信的一帧数据为64 字节、波特率为115 200 bps这些要求,CLK 信号和WEN 信号在一次测量过程内只出现64 个高电平,正好传输64 个字节,其余时间则不进行传输。其中,该模块的主要控制信号产生电路设计如图7 所示。

图7 频率发生电路Fig 7 Frequency generation circuit
3.3 UART 控制模块
该模块包括三个部分:锁存器、数据选择开关以及UART 串行通信模块。锁存器的作用是在等精度测频模块计数器停止计数时将计数结果进行锁存。数据选择开关的作用是将多路来的频率计数结果按一定的时序发送给UART 模块。UART 模块的作用是将并行数据按一定时序串行输出到上位机。
4 实 验
本测量系统在实验室和飞机上都进行了相关测试,在实验室主要是针对等精度测频法和电压与频率的对应关系进行校准与调试,机上测试主要是对导流叶片实际角度与测量角度进行结果比对,检测系统的可靠性。
4.1 等精度测频测试结果
利用串行助手对等精度测频结果进行数据接收,测量结果如表1 所示。

表1 测量系统实验室测试结果Tab 1 Laboratory test results of measuring system
由以上实验数据可知,本测量系统能够实现对频率信号的精确测量,测量误差在允许范围之内,不超过0.15%,误差极小。同时,可以利用上述数据对电压/频率转换电路进行线性校准。
4.2 角度测量与结果
在飞机上试验,通过用加压系统给飞机加压,利用模拟电调测得导流叶片角度和相对应的传感器输出电压。同时将本系统与飞机转角传感器相连,测得相应角度,测量结果如表2 所示。

表2 测量系统机上试验结果Tab 2 Airplane test results of measuring system
由以上数据可知,本测量系统能够实现对发动机导流叶片角度的精确测量,而且系统测量速度快,测量误差不超过0.2%,证明了该系统的测量方法和软硬件设计是可行的。
5 结 论
该导流叶片角度测量装置经过检验,系统硬件电路稳定,改变了以往测量装置印刷电路板面积大、可维护性低、维修成本高等缺点,并且经过实验和现场测试证明:系统可靠,方法正确。将FPGA 技术应用于导流叶片角度测量,大大提高了测量速度与精度,方便了发动机其他参数测量功能的扩展,为以后航空发动机的数字化设计和地面综合检测台的研制提供了指导。
[1] 王 兢.军用发动机控制系统技术分析及改进研究[J].国防科技,2014,35(3):36-39.
[2] Sanjay G.Controls and health management technologies for intelligent aerospace propulsion systems[C]∥42nd AIAA Aerospace Sciences Meeting and Exhibit,2004:5-8.
[3] 谈振藩,周洪宇,袁赣南.导航系统信息转换[M].北京:国防工业出版社,1992:52-53.
[4] 何秀然,李天亮,谢寿生.航空发动机自整角机的数字化设计[J].电机与控制学报,2006,10(1):14-17.
[5] 李友毅,李小奇,雷文生,等.基于单片机的自整角机转角测量研究[J].传感器与微系统,2006,25(3):15-17.
[6] 王海涛,谢寿生.基于DSP 的自整角机的设计[J].传感器技术,2005,24(12):66-68.
[7] 陈学英,李 颖.FPGA 应用实验教程[M].北京:国防工业出版社,2013:157-158.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
作文小学高年级(2022年3期)2022-04-20
装备制造技术(2020年1期)2020-12-25
中学生数理化·中考版(2019年10期)2019-11-25
电子制作(2019年24期)2019-02-23
福建中学数学(2018年1期)2018-11-29
中成药(2018年11期)2018-11-24
电子制作(2018年17期)2018-09-28
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
