
机械式旋转脉冲水深水位测量装置的设计与应用*
2015-04-01 12:18:28张业明李智国李中凯王昆鹏
传感器与微系统 2015年10期
张业明,李智国,王 耿,李中凯,刘 旭,王昆鹏
(1.河南理工大学 机械与动力工程学院,河南 焦作454000;2.中国矿业大学 机电工程学院,江苏 徐州221116;3.厦门大学 物理与机电工程学院,福建 厦门361005)
0 引 言
在化工、煤炭等生产企业大量存在蓄水池、水仓等设施,这些设施的水深和水位信息对于企业的安全生产非常重要。目前,水位的检测有直读式液位仪表、差压式液位仪表[1~3]、浮力式液位仪表、光电或光纤液位仪表[4,5]、超声波液位仪表[6~9]和电容式液位仪表[10,11]等。常规的检测方法存在以下问题:接触式传感器一旦浸入水中,容易导致传感器遇水短路、腐蚀等检测问题,最终导致检测信号异常,无法实现液位和水深的同时检测;非接触式传感器因为蓄水池内有悬浮物、颗粒等物料,无法准确测量出水深。当前还没有一种传感器能够同时检测水深和水位。
为解决准确测量蓄水池水深和水位的问题,本文设计了一种带增量式编码器的滚筒提升重锤的测量装置,实现了蓄水池水深和水位的可靠测量。
1 测量装置的系统构成
图1 为新型机械式旋转脉冲水深水位测量装置的剖视图。图2 为测量装置的俯视图与电气接线。图3 为测量装置的测量原理图,其中,重锤直径为D2,外壳距离蓄水池底面的高度为L0,蓄水池高度为H,蓄水池水深为h1,蓄水池沉淀物料厚度为h2,蓄水池水面处为x,固液界面处为y。

图1 水深水位测量装置的剖视图Fig 1 Sectional view of water depth and water level measurement device

图2 水深水位测量装置的俯视图与电气接线Fig 2 Top view of water depth and water level measurement device and its electrical wiring

图3 水深水位测量装置的测量原理图Fig 3 Measuring principle diagram of water depth and water level measurement device
新型机械式旋转脉冲水深水位测量装置由滚筒提升装置、夹紧装置和控制装置三部分组成。
1)在滚筒提升装置中,滚筒电动机通过右联轴器与滚筒轴相连,滚筒上缠绕着钢丝绳,钢丝绳末端连接重锤,滚筒轴通过左联轴器与光电编码器相连;滚筒电动机转动带动滚筒旋转,实现钢丝绳收绳的动作,将重锤提起。
2)夹紧装置由丝杠、夹紧电动机、光轴和夹紧挡板组成;夹紧电动机的轴与丝杠连接在一起,丝杠的另一端连接带有螺纹孔夹紧挡板,同时夹紧挡板的光孔与光轴来连接;当夹紧挡板紧压在滚筒表面时,由于滚筒表面摩擦力,阻止滚筒旋转,从而使重锤停止自由下落。
3)控制装置由可编程序控制器、光电编码器、光电开关、电源、滚筒电动机和夹紧电动机组成。可编程序控制器型号为西门子S7—200 SMART SR20,光电编码器型号为HN3806—600—AB,光电开关型号为E3S—GS15N。滚筒电动机和夹紧电动机采用37GB528 型12 V 供电减速马达。
2 测量装置的测量原理与测量步骤
2.1 测量原理
由于重锤的自身重力大于滚筒电动机的减速器的机械阻力,当夹紧装置松开以后,重锤会因为重力作用下加速下落。在重锤自由下降的过程中,通过实时检测光电编码器输出的旋转脉冲数,可以得到重锤下降的位移、速度、加速度,找出重锤下降的加速度突变点,由此判断出蓄水池的水面和固液界面两个临界点,进而计算出蓄水池的水深和水位。
从测量装置外壳底部重锤开始自由下落起,至下落到蓄水池的固液界面处y 的整个过程中,以时间间隔Δt 为采样周期,实时采集重锤下降的位移L0,L1,…,Ln。设光电编码器旋转一圈输出脉冲数为M,滚筒直径为D1,重锤直径为D2;设在某一时刻t,可编程序控制器采集到光电编码器输出的脉冲数为N,则重锤下降位移L 为

根据采样周期Δt 和位移序列,计算出各采样点间的平均速度序列V0,V1,…,Vn-1,其中,Vi为

根据采样周期Δt 和速度序列V0,V1,…,Vn-1,计算出加速度序列a0,a1,…,an-2和相邻加速度差序列b0,b1,…,bn-3;其中,ai,bi分别为

假设:1)当i=x1(0≤x1≤n-3),相邻加速度差bi由零变为负值,则此时重锤开始进入蓄水池水面,由于受到水的阻力作用,导致相邻加速度差bi由零变为负值。由此确定出蓄水池x 处的临界采样点x1(0≤x1≤n-3),此时重锤下落的位移Lx1+1;2)当i=y1(0≤y1≤n-3),相邻加速度差取负值中的最小值,则此时重锤达到蓄水池固液界面交界处,由于受到蓄水池固态物料的阻力作用,导致相邻加速度差bi为负值的最小值。由此确定出蓄水池y 处的临界采样点y1(0≤y1≤n-3),此时重锤下落的位移Ly1+1。于是,有:
1)蓄水池水深h1为

2)蓄水池沉淀物料厚度h2为

3)蓄水池水位h 为

2.2 测量步骤
1)寻找检测零位
光电开关输入信号,夹紧电动机正转解除滚筒闭锁,启动滚筒电动机正转,驱动重锤下降0.5 m,然后滚筒电动机反转,驱动重锤上升到测量装置的外壳的表面,此刻滚筒电动机反转堵转,可认为重锤位于初始检测零位。
2)检测蓄水池水面x
滚筒电动机断电(此时夹紧电动机通电,滚筒闭锁已经解除),重锤在自身重力作用下,克服减速机阻力、空气阻力等向下运动。重锤进入水面x 的瞬间,加速度发生突变。通过编码器测到的数据,可算出重锤自初始检测零位到蓄水池水面x 的位移量Lx1+1。
3)检测蓄水池固液界面y
重锤进入水中后,继续往下运动。当接触到蓄水池固液界面y 时,重锤受到蓄水池固体物料的阻力,加速度发生突变为负值的最小值,记下此时编码器的脉冲数,即得到初始零位到固液界面y 的距离Ly1+1。
测量出初始检测零位到蓄水池底板的高度L0,根据公式(5)、式(6)、式(7),计算出蓄水池水深h1、蓄水池沉淀物料厚度h2和蓄水池水位h。
4)重锤返回初始检测零位
当检测到重锤运动加速度发生突变为负值的最小值时,延迟0.1 s,启动滚筒电动机反转,通过钢丝绳将重锤提升上去,当重锤回到初始检测零位时,夹紧电动机反转,使滚筒闭锁,滚筒电动机断电。本次测试结束。
5)计算平均值
多次重复步骤(1)~(4)过程,计算蓄水池水深、沉淀物料厚度和水位的平均值,并存储。
3 测量装置的控制程序设计
新型机械式旋转脉冲水深水位测量装置的PLC 控制程序的总流程图如图4 所示,PLC 控制程序的运行时序图如图5 所示。

图4 测量装置的PLC 控制程序的流程图Fig 4 Flow chart of PLC control program of measurement device
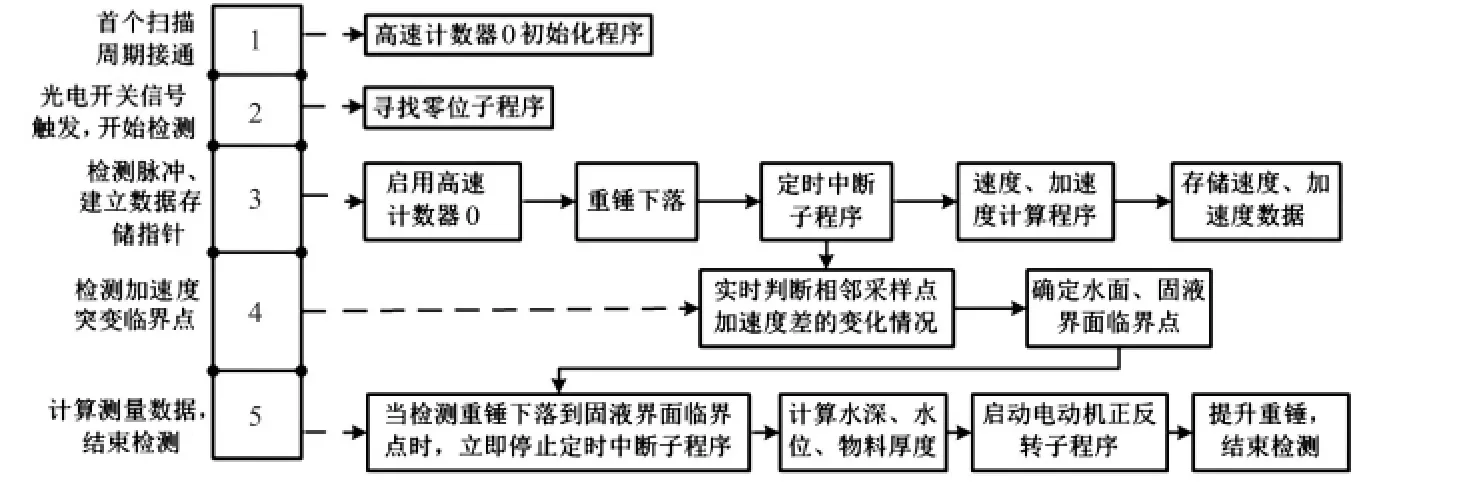
图5 测量装置的PLC 控制程序的运行时序图Fig 5 Running sequence diagram of PLC control program for measuring device
4 具体应用与数据处理
重锤质量取360,510 g 两种情况,采样时间间隔取0.2,0.15,0.12,0.10 s 四种情况,分别在实验室进行测量实验。表1 和表2 分别为360,510 g 重锤在不同采样时间下的测量数据。

表1 360 g 重锤时测量数据Tab 1 Measurement datas when hammer weight is 360g
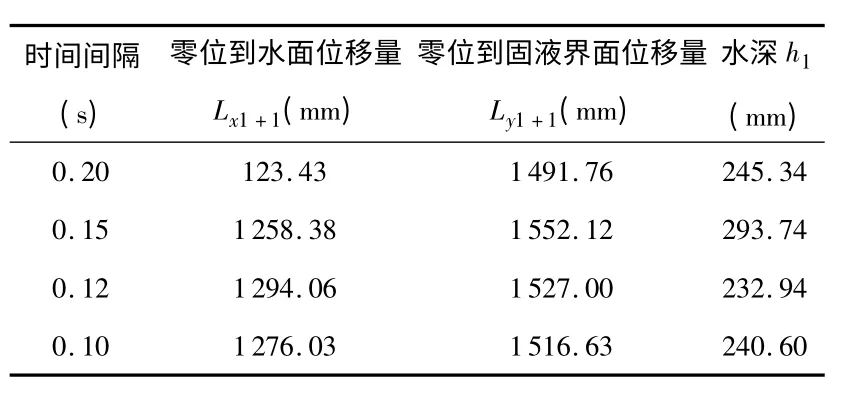
表2 510 g 重锤时的测量数据Tab 2 Measurement datas when hammer weight is 510 g
图6 为重锤510 g 采样间隔0.10 s 时的采样数据曲线。
经过大量实验数据对比可知,采样时间越短其在临界位置的判断越为清晰,但当采样时间过短时其脉冲间的数据波动较大而不利于水面和固液界面两个临界点的界定。综合分析,确定出重锤为510 g、采样时间间隔为0.10 s 时测量效果最佳,实验数据结果最为理想,其水深测量误差小于1%。

图6 重锤510 g 采样间隔0.10 s 时的数据曲线Fig 6 Data curve when hammer weight is 510 g and sampling interval is 0.10 s
5 结束语
机械式旋转脉冲水深水位测量装置采用S7—200 SMART SR20 为控制器,通过对重锤自由下降过程中光电编码器输出旋转脉冲数的实时检测,完成蓄水池水深、水位、物料厚度的自动测量,有助于实现蓄水池的可靠自动检测和状态监视。该测量装置抗污染能力强,误差较小,能同时检测水深、水位和沉淀物料厚度,作为煤矿水仓自动控制系统的组成部分,已经成功应用于企业生产。
[1] 郭凤仪,李 斌,马文龙,等.深水水位检测用压力传感器补偿方法研究[J].仪表技术与传感器,2010(6):6-8.
[2] 李加念,洪添胜,倪慧娜.基于太阳能的微灌系统恒压供水自动控制装置研制[J].农业工程学报,2013,29(12):86-93.
[3] 徐 磊,时维铎,邢玉秀.基于DZ—H 扩散硅液位变送器的水位测量系统设计[J].传感器与微系统,2014,33(6):104-110.
[4] 朱高中.基于单片机远程水位检测系统的研究[J].光电子技术,2012,32(4):246-250.
[5] 张 玉,孙 旋,刘电霆.光纤传感器在液位检测中的应用[J].传感器与微系统,2011,30(6):123-125.
[6] 刘小平,苏真伟,王 珩.CNG 储气井检测中的水位自适应控制系统[J].计算机测量与控制,2011,19(6):1348-1350.
[7] 张 文.无线超声波液位测量仪的设计[J].仪表技术与传感器,2014(11):41-43.
[8] 刘 赟,王 波,刘智超.一种基于超声测距技术的超声液位仪设计[J].传感器与微系统,2014,33(9):91-93.
[9] 卢 伟,王 杨,赵红东,等.高精度超声波液位测量系统的设计与实现[J].仪表技术与传感器,2013(7):46-48.
[10]符欲梅,张巧娥,昝昕武,等.微分法实现与介质无关的电容式液位测量[J].传感器与微系统,2011,30(5):139-145.
[11]赵远鹏,靳宝全,程 珩.基于变介质感测的液位传感器研究[J].自动化与仪表,2012(7):20-23.
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
建材发展导向(2022年4期)2022-03-16 06:12:12
英语文摘(2021年7期)2021-08-14 02:36:40
考试与评价·高二版(2020年4期)2020-09-10 07:22:44
江西建材(2018年1期)2018-04-04 05:26:08
河北电力技术(2015年2期)2015-11-21 02:45:50
橡塑技术与装备(2015年7期)2015-07-03 12:17:56
浙江国土资源(2015年4期)2015-05-09 08:43:59
机械制造与自动化(2014年1期)2014-03-01 04:22:04
