
构造既不完全可控又不完全可观状态空间模型的方法
2015-03-31 02:34李锦慧王忠
电气自动化 2015年4期
李锦慧, 王忠
(四川大学 电气信息学院,四川 成都 610065)
构造既不完全可控又不完全可观状态空间模型的方法
李锦慧, 王忠
(四川大学 电气信息学院,四川 成都 610065)
简述了状态空间的起源及其相关概念,以及系统的可控性、可观性、线性变换和规范形的算法,提出了一种简易的构造既不完全可控又不完全可观状态空间模型的方法,并分析了方法可扩展性,简单论述其实际应用中的意义。
状态空间;可控性;可观性;线性变换;规范形
0 引 言
1960年前后,在计算机技术和航天技术的推动下,现代控制理论开始发展,在此期间,美国学者卡尔曼(Kalman)引入了状态空间的概念,因而以系统内部状态为基础分析系统的控制成为可能。状态空间模型是在时域条件下进行分析,隐含着时间的自变量。状态在控制工程中是指在系统中决定系统状态的最小数目的变量的有序集合,而状态空间则是指该系统的全部可能状态的集合[1]。即模拟一个空间坐标系,状态空间是以状态变量为坐标轴的空间,而系统的状态则是空间中的一个向量。研究线性系统的状态空间模型是对系统行为的一种完全描述,而可控性和可观测性则细化并直观的描述了系统的内部状态。
经典控制理论中用传递函数描述系统的输入输出特性,输出量总是可以被测量的,而输出量也是被控量,因而只要系统是因果系统并且稳定,输出量即为可控的,不需要判断可控性和可观性[2]。相比于经典控制理论,现代控制理论是以状态空间法为基础描述系统特性的,并引入了可控性和可观性的概念。在用状态空间法描述系统时通常采用状态空间表达式,状态空间表达式是对系统的一种完全的描述,是判断系统的可控性和可观性的主要依据。
1 系统的可控性和可观测性
1.1 系统的可控性
系统的可控性是指系统的状态在一定的输入作用下转移到指定状态的能力。可控性判据适用于线性系统,选取初始时刻t0∈J的非零初始状态x(t0)=x0,t1∈J(t1>t0)的无约束容许控制u(t)(t∈[t0,t1]),使系统在u(t)作用下可从x0状态转移到x(t1)=0状态,称状态x0为系统在t0时刻的一个可控状态[3]。
1.2 系统的可观测性
系统的可观测性是指系统的输出反映系统全部状态的程度[4]。可观性判据适用于线性连续时变系统,选取初始时刻t0∈J的非零初始状态x0,若t1∈J(t1>t0)使系统对所用的t∈[t0,t1]的输出y(t)恒不为零,称状态x0为系统在t0时刻的可观状态。
2 线性变换
线性变换是在状态空间中取定坐标系,坐标在有限维空间中变换的推广,本质上就是改变坐标系。通常定义线性定常系统为:
3 线性单变量系统的可控规范形和可观测规范形
规范形是系统状态空间表达式在特定的线性变换下得到的规范形式,而经线性变换能够得到最简单的状态方程的规范形式能表现为特征值分布于状态矩阵的对角线元素上[7],正是由于规范形能简单并集中地将系统的某些特性或结构清晰地在系数矩阵中表现出来,因而运用规范形设计便于分析计算。
3.1 线性单变量系统的可控规范形
线性单变量系统的第一可控规范形为:
而:
可以推证出可控规范形能在系数矩阵中反映状态的完全可控性。
3.2 线性单变量系统的可观测规范形
线性单变量系统的第一可观测规范形为:
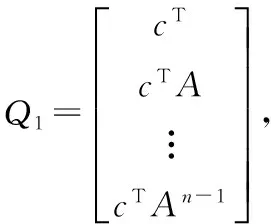
而:
可以推证出可观测规范形能在系数矩阵中反映状态的完全可观测性。
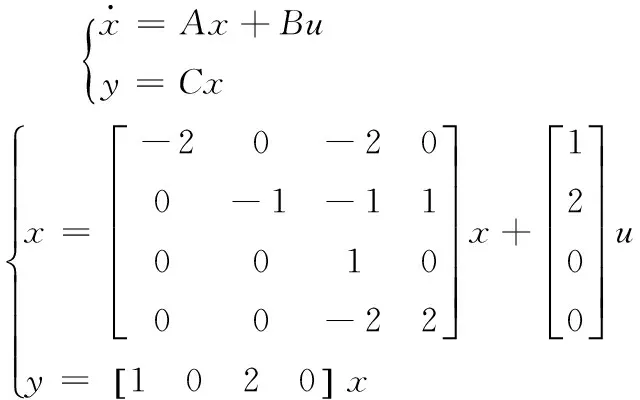
4 构造既不完全可控又不完全可观测系统
如果在实际中出现需要构造既不完全可控又不完全可观的状态空间模型,即同时具有可控可观极点、可控不可观极点、不可控可观极点、不可控不可观极点,则可使用采用下面一种较为简便的方式。
构造最为简单的四阶状态空间模型(即能够出现上述四种极点的最小阶状态空间模型),即:
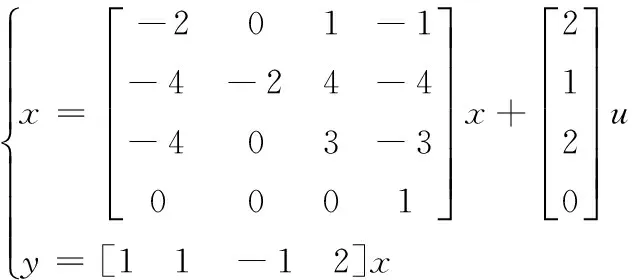
把四阶的状态空间模型同时按可控可观分解,得:
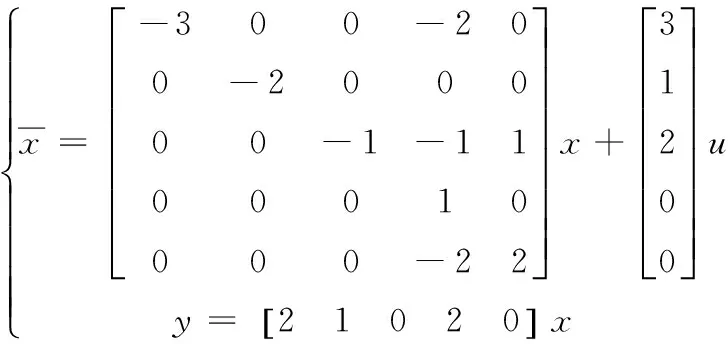
根据四阶规范性在原四阶状态空间模型的基础上添加极点(四种极点的任意一种均可),其余极点不变。以五阶系统为例,在基础的四阶状态空间模型基础上添加一个可控可观极点-3。根据所有极点,按系统结构规范分解的规范形式构造出五阶系统同时按可控可观分解的规范型为:
由此可得新构造的五阶规范型的可控可观极点为-2、-3;可控不可观极点为-1;不可控可观极点为1;不可控不可观极点为2。
用相同的方法构造B1,C1,得:
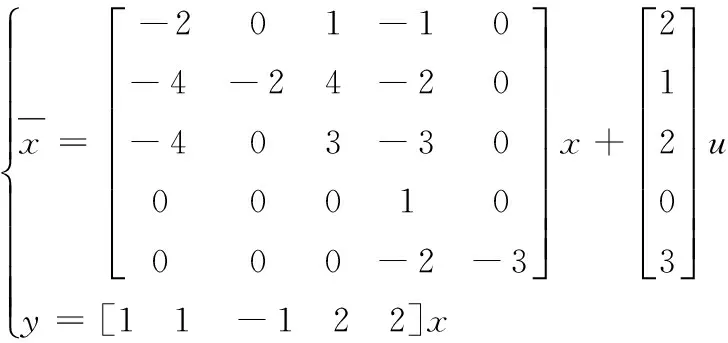
则新构造的五阶状态空间模型为:
由基础的四阶状态空间模型所得变换矩阵扩展一行一列得五阶系统的变换矩阵

即构造的五阶既不完全可控又不完全可观状态空间模型为:
5 结束语
在现实生活中很少需要构造不完全可控不完全可观的状态空间模型,实际应用意义不大,然而在研究系统性能时,可以通过构造系统,分析系统的相关功能更好地理解系统的性能,这种构造系统的方法还可以拓展到其他应用领域。若只需要构造可控可观状态模型,从其最简形式无论构造多少阶系统都具有可行性,并且为MATLAB构造类似的状态空间模型提供了思路,具有一定的便捷性。
[1] 戴忠达.自动控制理论基础[M] .北京:清华大学出版社,2005.
[2] 王建辉,顾树生.自动控制原理[M].北京:清华大学出版社,2007.
[3] 胡寿松.自动控制原理.第四版[M].北京:科学出版社,2001.
[4] 黄家英.自动控制原理[M].北京:高等教育出版社,2010.
[5] 段广仁. 线性系统理论[M].哈尔滨:哈尔滨工业大学出版社,2004.
[6] 郑大钟. 线性系统理论[M].2版.北京:清华大学出版社,2002.
[7] 吴麒,王诗宓.Principles of Automatic Control.下册[M].2版.北京:清华大学出版社,2006.
A Method for Constructing an Incompletely Controllable and Observable State Space Model
LI Jin-hui, WANG Zhong
(Electrical Information College, Sichuan University, Chengdu Sichuan 610065, China)
This paper briefly describes the origin and related concepts of the state space, and narrates the controllability, observability and linear transformation of the system as well as the algorithm of normal form. it presents a simple method for constructing an incompletely controllable and observable state space model, analyzes its extensibility and briefly discusses its significance in practical application.
state space; controllability; observability; linear transformation; normal form
航空科学基金项目(20100119004),国家级大学生创新创业训练计划项目(201310610109)
10.3969/j·issn.1000-3886.2015.04.007
TP271
A
1000-3886(2015)04-0019-03
定稿日期: 2014-09-30
猜你喜欢
数学物理学报(2022年4期)2022-08-22
哈尔滨工程大学学报(2022年2期)2022-03-11
中学生数理化·高一版(2021年2期)2021-03-19
数学物理学报(2020年4期)2020-09-07
华东师范大学学报(自然科学版)(2020年6期)2020-01-11
数学物理学报(2019年1期)2019-03-21
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
汽车文摘(2016年11期)2016-12-08
小雪花·成长指南(2016年11期)2016-12-07
哈尔滨师范大学自然科学学报(2015年6期)2015-04-23
