
基于Parylene 封装的宽频带MEMS 矢量水听器*
2015-03-30 05:54王任鑫张国军薛晨阳张文栋
传感器与微系统 2015年8期
王任鑫,刘 源,张国军,刘 俊,薛晨阳,张文栋
(1.仪器科学与动态测试教育部重点实验室 中北大学,山西 太原030051;2.电子测试技术重点实验室 中北大学,山西 太原030051)
0 引 言
海洋环境信息的准确获取是科学制定海洋发展战略的重要保障。获取海洋环境信息主要依靠各种声纳系统,而水听器作为声纳的核心器件,其性能直接影响声纳的探测距离与定位精度。国内外研究小组提出了多种基于仿生纤毛的传感器,如压阻式三维力传感器[1]、光电式触觉传感器[2],由于不涉及水下应用,所以,对封装要求相对简单,采用聚氨酯封装传导压力;还有高灵敏气流传感器[3]、宽频带气流传感器[4],可以直接和被测媒介接触。An T C 提出一种基于多壁碳纳米管—聚吡咯涂敷的不锈钢网格,由于其超疏水性(接触角可达163°),可以作为水下传感器的防水绝缘材料[5]。但是,这种封装方式会形成一个水—空气界面,使得声波透射系数极低,即使封装能耐得住水压,也不适用于水听器。Asadnia M 等人提出一种水下柔性压电传感器,利用聚甲基丙烯酸甲酯(PMMA)和压电陶瓷(PZT)薄膜形成敏感空腔,下层采用液晶聚合物,上层采用聚二甲基硅氧烷(poly-dimethylsiloxane,PDMS)封装方式[6];Yaul F M 同样利用PDMS 空腔和弹性应力计制备了一种水下柔性压力传感器,外层为PDMS 封装[7]。然而,由于PDMS 抗渗透性能不佳,不适合长期水下工作,且PDMS 只能采用旋涂方式,不适合封装有大台阶的器件。
南京理工大学Wang Hua 提出一种水下手指式力传感器,采用一个小圆柱体作为力感知外层,应力膜置于绝缘油中,通过圆柱体将压力传导至应力膜[8];文献[9]中提出的MEMS 仿生矢量水听器封装结构,即将声—电转换结构封装在聚氨酯透声帽内,并在透声帽中灌满硅油。这种封装方式基本解决了声信号从水中传递到纤毛的难题,但也存在声波能量损失较大的缺点,因为声音信号从水中传递给纤毛要经过水—透声帽—硅油3 层介质。虽然在原则上尽量保证透声帽、硅油与水的特性阻抗匹配,但由于透声帽本身存在一个共振峰,位于5 Hz ~1 kHz 目标频带范围内,导致水听器频响失真,影响水听器的工作频带。
综上所述,对于仿生纤毛式MEMS 矢量水听器,目前尚无理想适用的封装方式,亟需研究和改进。另一方面,Parylene 薄膜在传感器封装中有应用潜力,然而,针对振动式微传感器的Parylene 薄膜封装应用研究很少,需深入探究。针对水下应用的振动式敏感结构的绝缘封装,本文提出一种新的高疏水Parylene 薄膜无透声帽封装矢量水听器,即利用Parylene 薄膜的淀积高保形性、低渗透性和高绝缘性,实现无透声帽封装,解决透声帽带来的声信号衰减和共振峰引入问题,提高水听器灵敏度和工作频率。
1 水听器原理
现有国内研制的压阻式仿生MEMS 矢量水听器,具有较高的灵敏度、良好的低频效应和良好的“8”字余弦指向性[10],芯片如图1(a),芯片结构包括两部分:高精度四梁—中心连接体微结构和刚硬塑料柱体。将刚硬塑料柱体和力敏电阻器分别模仿成鱼类侧线器官的可动纤毛与感觉细胞。其中,刚硬塑料柱体固定于四梁—中心连接体的中央,力敏单元分别设置于四梁的边缘处。在水下声音信号的作用下,刚硬塑料柱体将随其周围的水介质质点振动。柱体将会将振动信号传递给敏感结构,使梁产生应力变化,弹性梁上敏感结构的应变能由力敏电阻器的阻值变化来反应,从而实现水下平面内声信号的矢量探测。
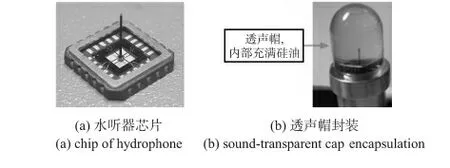
图1 MEMS 矢量水听器Fig 1 MEMS vector hydrophone
本文提出一种新的Parylene 薄膜无透声帽封装的矢量水听器,利用Parylene 薄膜的淀积,实现无透声帽封装,改善水听器工作频率性能,如图2 所示。Parylene 无透声帽的封装可以实现水听器敏感结构直接在水中的影响,避免水听器透声帽的共振峰引入,从而改善频响性能。
2 实验测试
为了验证Parylene 封装能够提高频带,将进行以下测试:振动台测共振峰,接收衰减曲线测共振峰,以及矢量水听器校准装置测频率响应曲线。
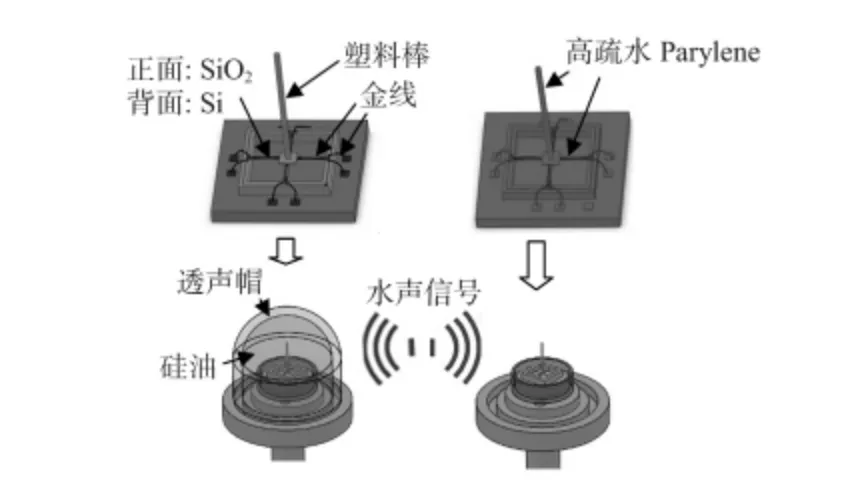
图2 透声帽封装与Parylene 薄膜封装对比示意图Fig 2 Comparison diagram of sound-transparent cap and parylene thin film encapsulations
2.1 振动台测试
基于压阻效应的MEMS 矢量水听器本质上是检测声场的振动信号,并且基于惯性器件的原理。利用振动台可以测试MEMS 矢量水听器进行频率响应曲线。实验中采用丹麦的B&K 公司生产的8305 标准加速度计,测试中将水听器的最大输出方向垂直于振动台,如图3 所示。测试曲线如图4 所示。
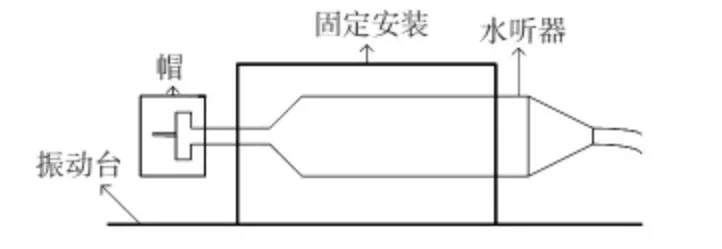
图3 振动台测试示意图Fig 3 Diagram of vibration platform test
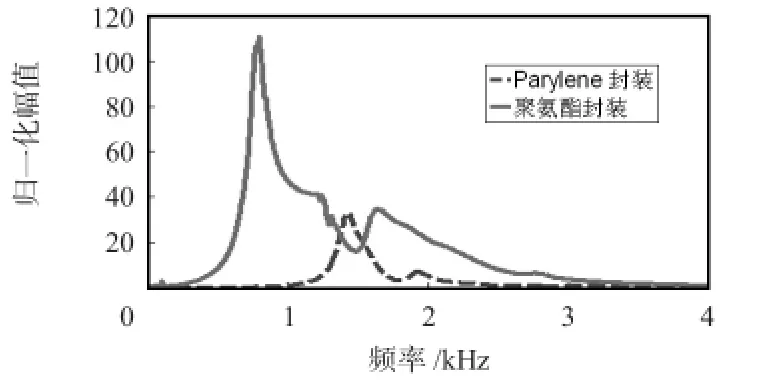
图4 频率响应曲线Fig 4 Frequency response curve
从图中可以看出:聚氨酯透声帽的共振峰为790 Hz,而改进后的Parylene 的共振峰为1 400 Hz。测试中由于透声帽的共振峰测试时,透声帽的外部为空气,根据流固耦合原理,其峰值比实际应用中大一些。实验中Parylene 无透声帽的水听器的频带得到了拓宽。
2.2 阻尼法测试共振峰
为了进一步验证水听器频带的拓宽,可以通过分析水听器衰减信号得到敏感结构的共振峰。当声源发送一个正弦波,水听器接收到的衰减信号如图5 所示。
阻尼曲线可以得到衰减信号的周期T=700 μs,从而求出敏感结构的共振频率:f=1/T=1 428.57 Hz。从而进一步验证了Parylene 薄膜封装的MEMS 矢量水听器的共振峰提高到了约1 400 Hz。
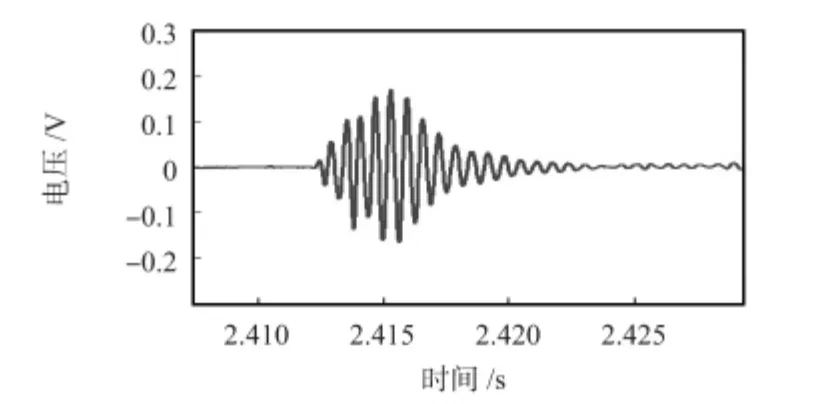
图5 阻尼曲线Fig 5 Damping curve
2.3 矢量水听器校准系统测试
为了验证Parylene 薄膜封装MEMS 水听器的性能,采用矢量水听器校准装置来测试MEMS 矢量水听器。灵敏度校准测试采用比较法校准,如图6,即将测得信号和标准水听器的输出进行比较,得到被测MEMS 矢量水听器的声压灵敏度。桶中为驻波声场,被测水听器的灵敏度S为

其中,UM与US分别为待校准水听器和标准水听器的开路电压有效值,d 与d0为待校准水听器与标准水听器到液面距离,k 为波数。
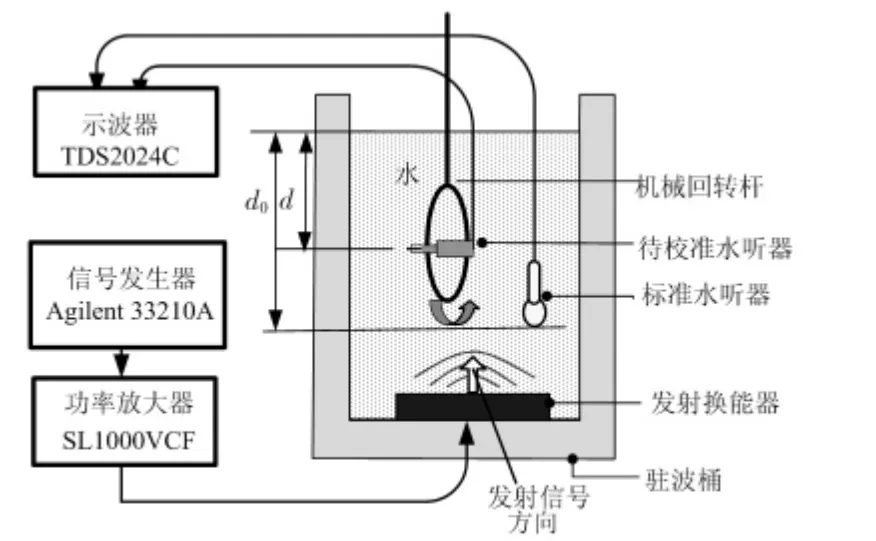
图6 灵敏度校准测试示意图Fig 6 Diagram of sensitivity calibrating test
灵敏度测试曲线如图7 所示,水听器的频带上限低于共振峰的2/3 频程,从频率响应曲线上可以得出:聚氨酯封装水听器工作频带上限约为300 Hz,而Parylene 封装水听器工作频带上限超过了1000 Hz。结论和以上的实验一致。
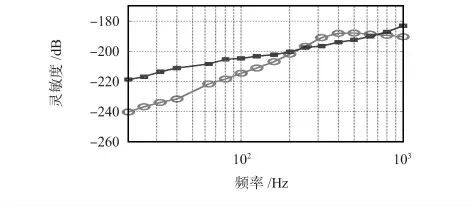
图7 灵敏度曲线Fig 7 Sensitivity curve
3 结 论
水听器的透声帽对封装水听器的性能影响很大,透声帽共振峰严重影响水听器信号的接收。因此,本文提出了Parylene 薄膜封装MEMS 矢量水听器,实现无透声帽封装,消除了透声帽对水声信号接收的影响,实验证实:Parylene 薄膜封装水听器的灵敏度与工作频率得到了有效提高,其共振峰提高到了1400 Hz,频带可达1000 Hz。
[1] Alcheikh N,Coutier C,Giroud S,et al.Characterization and modeling of a piezoresistive three-axial force micro sensor[J].Sensors and Actuators A:Physical,2013,201(10):188-192.
[2] Ascari L,Corradi P,Beccai L,et al.A miniaturized and flexible optoelectronic sensing system for tactile skin[J].Journal of Micromechanics and Microengineering,2007,17(11):2288 -2298.
[3] Chen N,Tucker C,Engel J M,et al.Design and characterization of artificial haircell sensor for flow sensing with ultrahigh velocity and angular sensitivity[J].Journal of Microelectromechanical Systems,2007,16(5):999-1014.
[4] Chen N,Tucker C,Engel J M,et al.Design and characterization of artificial haircell sensor for flow sensing with ultrahigh velocity and angular sensitivity[J].Journal of Microelectromechanical Systems,2007,16(5):999-1014.
[5] An T C.Fabrication of a superhydrophobic water-repellent mesh for underwater sensors[J].Journal of Sensor Science and Technology,2013,22(2):100-104.
[6] Asadnia M,Kottapalli A G P,Shen Z,et al.Flexible and surfacemountable piezoelectric sensor arrays for underwater sensing in marine vehicles[J].IEEE Sensors Journal,2013,13(10):3918-3925.
[7] Yaul F M,Bulovic'V,Lang J H.A flexible underwater pressure sensor array using a conductive elastomer strain gauge[J].Journal of Microelectromechanical Systems,2012,21(4):897-907.
[8] Wang Hua.A fingertip force sensor for underwater dexterous hand[J].Journal of Mechanical Science and Technology,2012,26(2):627-633.
[9] Liu L X,Zhang W D,Zhang G J,et al.Package optimization of the cilium-type MEMS bionic vector hydrophone[J].IEEE Sensors Journal,2014,14(4):1185-1192.
[10]Zhang G J,Wang P P,Guan L G,et al.Improvement of the MEMS bionic vector hydrophone[J].Microelectronics Journal,2011,42(5):815-819.
猜你喜欢
电声技术(2022年3期)2022-04-28
装备制造技术(2020年4期)2020-12-25
合肥工业大学学报(自然科学版)(2020年11期)2020-12-05
电脑知识与技术·经验技巧(2020年5期)2020-06-22
应用科技(2020年1期)2020-06-18
中国医学物理学杂志(2020年3期)2020-04-06
压电与声光(2019年4期)2019-08-29
航天电子对抗(2019年4期)2019-06-02
知识经济·中国直销(2018年12期)2018-12-29
当代陕西(2018年12期)2018-08-04
