
基于步态的下肢康复用外骨骼机器人运动分析
2015-03-30 06:11,,,2,
现代机械 2015年6期
,,,2 ,
(1.武汉理工大学,湖北 武汉 430070;2.中国科学院深圳先进技术研究院,广东 深圳 518055)
0 引言
本课题来源于中国科学院深圳先进技术研究院战略性研究:穿戴式下肢外骨骼机器人项目。
“外骨骼机器人”(Exoskeleton Robot)是指套在人体外面的机器人,也称“可穿戴的机器人”。外骨骼是指为生物提供保护和支持的坚硬外部结构[1],一般指昆虫或甲壳类动物身体外表的骨骼,具有支撑和保护作用。随着科技的进步以及仿生学的发展,人体外骨骼的研究开始受到学者们的广泛关注。人体下肢外骨骼机器人是一种可以穿戴,以人为主、机械为辅的人机一体化机械装置[2-3]。不仅具备保护人体和支持人体结构的功能,还大大增强了人体的力量、速度和耐力[4]。外骨骼机器人技术是融合传感、控制、信息、融合、移动计算,为作为操作者的人提供一种可穿戴的机械机构的综合技术。很早就有提及穿戴在人体外表、具备动力,借以帮助瘫痪者实现行走,这样的装备即被称作外骨骼机器人。理想的外骨骼机器人除了能够对使用者实行基本的走路,奔跑,及向前后任意弯曲,军用的还需提供防护并增强使用者的负重和运动能力,最好还可以飞行。
下肢康复用外骨骼机器人是针对下肢行走不便患者康复训练以及行走所设计的一种外骨骼机器人。它突破了由专门的康复训练师陪同训练等昂贵的传统康复治疗方法,依托于一种更加智能的、自主的、有效的以及无后遗症的康复训练方式,这无论是对患者自身来说,还是对社会都是一种福音,具有重要的现实意义[5]。有关研究表明,下肢康复用外骨骼机器人是目前最为有效、最为先进的康复训练方案[6]。在外骨骼机器人研制方面,国外主要是美国、日本颇见成效,国内清华大学、哈尔滨工业大学、中科院合肥智能机械研究所等在此领域也做了深入的研究。其中仿真大部分只对机器人的受力(如髋关节和膝关节的力矩等)进行仿真分析,仿真结果仅仅表明外骨骼能够满足人体运动以及其运动学分析和建模方法正确合理。然而针对残障人士而言,其步态与正常人还是有很大区别的,且步态特征对下肢残障人士运动有着重大的意义。
Adams软件是专门用于机械产品中虚拟产品开发方面的软件,通过建立多体动力学模型和虚拟试验,在产品开发阶段就可以帮助设计者发现设计缺陷,并提出改进方法。Adams研究复杂系统的运动学和动力学关系,它以计算多体动力学为理论基础,结合高性能计算机来对产品进行仿真计算,得到各种性能数据,帮助设计者发现问题并解决问题[6-7]。
本文着重通过对人体下肢运动机理研究,提出了残障人士的步态设计的特征,并用Adams软件对外骨骼机器人进行运动学和动力学仿真分析。
1 人体下肢运动机理研究
人体下肢可以实现多种多样的运动,这是由于人体下肢关节的基本运动组合而形成的[8]。正常人的行走主要是靠骨骼、关节以及肌肉三者之间互相作用实现的,其中骨骼起着杠杆的作用,关节起着杠杆之间运动副的作用,而肌肉则起着动力的作用。
人体行走行为必需的两个要素:一是双脚周期性的移动支撑位置;二是地面足够的反作用力支撑身体[9]。本文对人体下肢运动机理的研究主要是研究下肢步态特征。
(1)步态周期分析
人的行走具有周期性、协调性和左右腿对称的特点,并且运动基本是在矢状面内完成的。人在行走时,一侧足跟着地到该侧足跟再次着地的过程被称为一个步态周期[10],每一个步态周期分为支撑相和摆动相两个阶段[11]。图1是人体行走的一个右下肢步态周期图[12]。
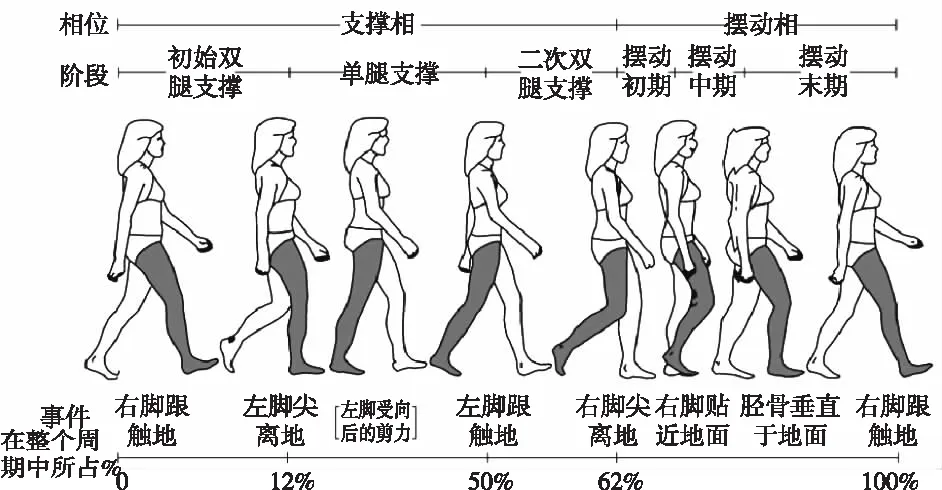
图1 人体行走的步态周期图
通过查阅相关资料:健康人行走的步长约为500 mm-800 mm,步宽约8±3.5,足角约6.75°[13]。
(2)基于OpenSim的人体下肢步态仿真
OpenSim是一款完全免费,技术完全开源的一款人体运动仿真软件。使用人员可以非常容易的在网上下载该软件,另外也可以在OpenSim的社区论坛上下载网友共享的大量研究数据以及模型。其步态的具体过程如图2所示。

支撑相摆动相双支撑单支撑双支撑初中末
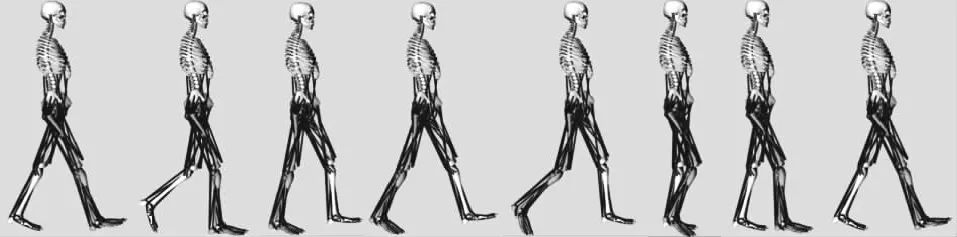
图2 仿真步态图
步态仿真结果分析,这里对正常步态的关节角位移进行结果分析,最终得到人体下肢各个关节的角位移范围。如图3人体下肢关节角位移—时间曲线图。

图3 人体下肢关节角位移—时间曲线图
从图中可以得到在正常步态状态下髋关节、膝关节以及踝关节的活动范围。其具体范围为:髋关节:-17°~25°;膝关节:0°~58°;踝关节:-12°~12°,并且左右腿关节是对称的。
(3)残障人士的步态特征设计
残障人士与正常人行走的步态是有所区别的,除了参照正常人行走的步态特征外,还要注意适合下肢残障人士的步态。为了使步态稳定,较容易适应,本文设计的步态具有以下三个特征。
1)步行速度慢,从而给穿戴者足够的时间来调整行走的重心平稳;
2)步长短,让重心尽可能的接近脚板平衡区域,易于调整重心平衡;
3)行走的单支撑相中有一个较短的平衡过程,然后再快速迈步,这主要是方便穿戴者找到步态的节奏。
2 外骨骼机器人三维建模与导入
(1)构建外骨骼机器人模型

图4 外骨骼机器人整机三维模型
查阅相关手册确定整体结构的一些基本参数,从而构建各模块的Pro/E三维模型;并各个模块模型装配起来,得到外骨骼机器人整机三维模型如图4 所示。
(2)将构建的模型导入到Admas

图5 导入的机器人模型和穿戴模型图
首先在Adams软件环境下构建起一个虚拟样机,将Pro/E中的模型另存为Parasolid格式(扩展名为*.X_T)。其次为了使仿真更接近实际情况,构建的虚拟样机除了从Pro/E中导入外骨骼机器人三维模型外,还需要在Adams中构建外骨骼机器人的“穿戴者”模型。外骨骼机器人导入模型和外骨骼机器人“穿戴”模型如图5所示。
3 外骨骼机器人运动副和驱动设置
根据人体下肢运动机理研究,外骨骼机器人的运动副和驱动设置如图6(a)所示,髋关节和膝关节的驱动结构的运动副和驱动设置是一致的,在螺杆上设置螺旋副和转动副,其中转动副设置为虚拟驱动,与螺杆配合的螺母设置移动副,连杆两头设置转动副,其详细设置情况如图6(b)所示。另外,踝关节上设置转动副,且转动副设置为虚拟驱动,详细设置如图6(c)所示。

图6 详细的运动副和驱动设置
4 外穿戴行走仿真分析
(1)仿真准备工作
行走仿真分析准备工作,主要有构建大地模型添加机器人模型与大地之间的约束和作用力,添加驱动函数两个方面。
在仿真分析前,可以添加身躯与大地以及脚板与大地之间的平行副,其中身躯与大地之间的平行副约束可以保证模型在行走的过程中,人的身躯始终垂直于地面,从而避免仿真过程中因为重心不稳而摔倒;而脚板与大地之间的平行副约束可以保证在行走的过程中,脚板始终与大地之间平行,从而避免了脚板拖在地面上,影响行走仿真的可靠性。仿真时一些基本的前提参数如表1所示。

表1 基本的前提参数
穿戴行走有4个关节的虚拟驱动,即左右髋关节和膝关节有主动驱动,踝关节为被动驱动。可以使用Adams中的AKISPL样条函数作为驱动函数。如图7至10所示,其中X坐标代表时间,单位是s,Y坐标代表角位移,单位是度。
(2)穿戴行走运动学仿真分析

图7 右髋关节的驱动函数样条曲线图
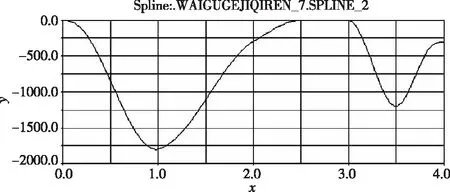
图8 左膝关节的驱动函数样条曲线图
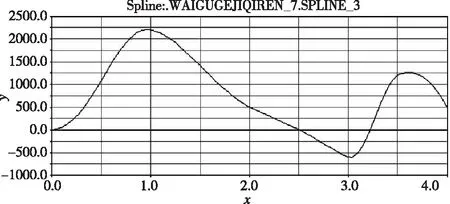
图9 左髋关节的驱动函数样条曲线图

图10 右膝关节的驱动函数样条曲线图
设置仿真时长为4 s,仿真步数是5000,具体的行走运动学仿真过程如图11所示。
对所仿真得到的运动学曲线进行分析,研究相关的步态参数信息,从而得到左右髋关节和左右膝关节的角位移时间曲线分别如图12和图13所示。

初始单支撑相双支撑相单支撑相双支撑相摆动相

图11 穿戴行走运动学仿真过程
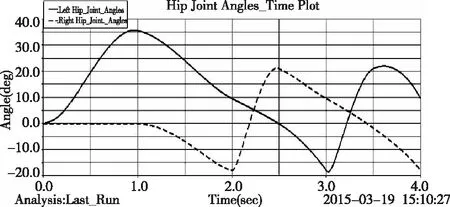
图12 左右髋关节的角位移时间曲线
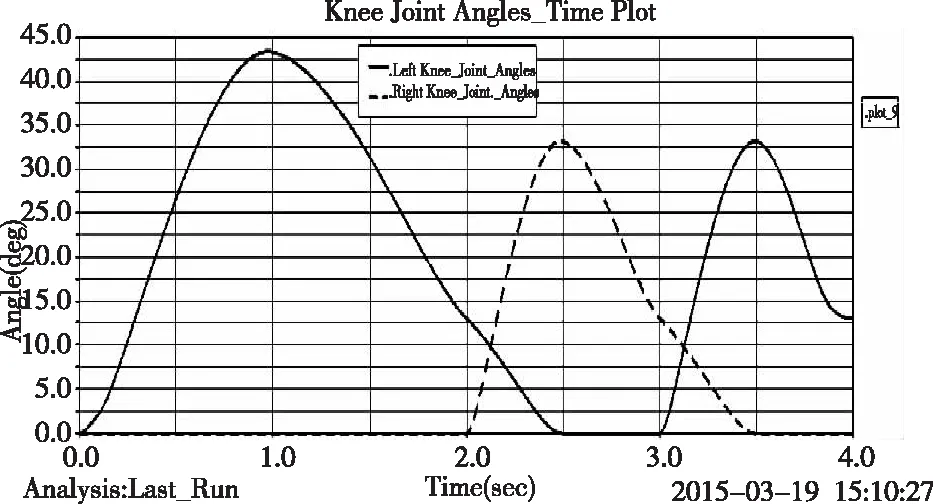
图13 左右膝关节的角位移时间曲线
可以很明显的看出,在2 s-4 s的一个步态周期里,左右膝关节和左右髋关节的角位移是呈现左右对称的特征。髋关节的角位移范围和Opensim仿真正常人行走步态的角位移范围一致,但膝关节角位移范围则偏小,这主要是考虑到实际穿戴者为残障人士,为了步态的稳定性,通过使膝关节角位移范围的缩小从而减小步长。
左右髋关节和膝关节的角速度时间曲线如图14和图15所示。
从图中可以看出这个速度比正常人的速度稍慢一些,满足残障人士步态特征一。

图14 左右髋关节的角速度时间曲线
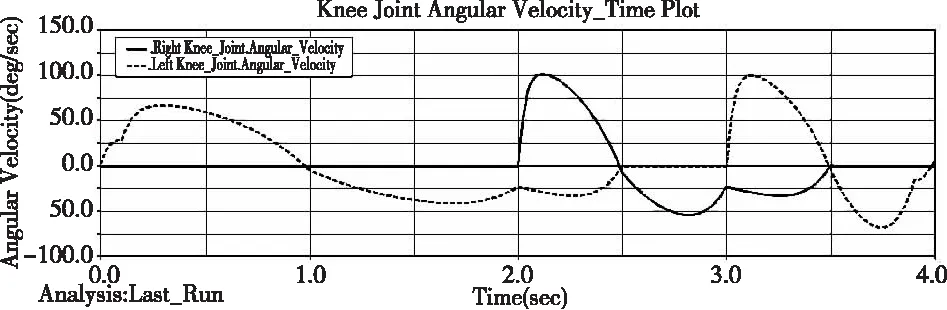
图15 左右膝关节的角速度时间曲线
机器人左右足的重心位移时间曲线和机器人前进速度时间曲线分别如图16和图17所示。
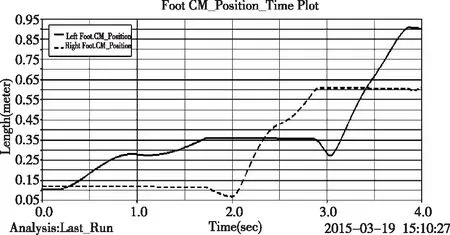
图16 左右足的重心位移时间曲线

图17 机器人前进速度时间曲线
从这个图中可以看出行走的一个步长比健康人步长小,符合残障人士步态特征二。
从图可以得到,机器人前行的时候就和正常人一样是有节奏的,这样便于穿戴者找到行走的节奏,从而适应步态也符合特征三。综上可以看出,外骨骼机器人结构可以完成穿戴行走运动,是合理的。
(3)穿戴行走动力学仿真分析
穿戴行走的动力学分析主要是为了研究整个穿戴行走的过程中受力的特点,从而更改机械结构的材料以及指导电机等部件的选型。下面对相关动力学参数曲线分析时,会对这两个方面进行阐述。
腿的电机减速器输出扭矩曲线图以及输出功率曲线图。分别如图18和图19所示。
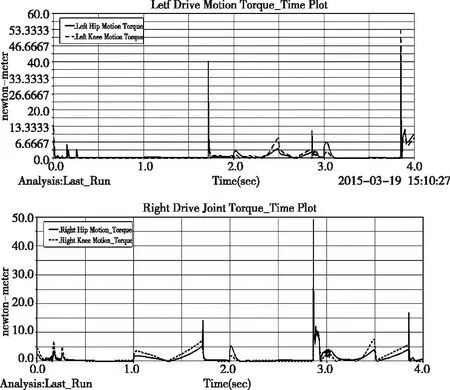
图18 腿电机减速器输出扭矩时间曲线

图19 腿电机减速器输出功率时间曲线
从这几个曲线图可以得出,在穿戴行走的过程中有如下动力学特点:
①当行走腿踏上地面的瞬间,电机减速器会输出较大的扭矩和功率。
②当处于单支撑相时,离地腿的髋关节和膝关节减速器输出扭矩和功率都很小,且髋关节的扭矩大于膝关节,而踩地腿的髋关节和膝关节减速器输出扭矩和功率较大,其膝关节的扭矩大于髋关节。
该行走仿真属于多刚体的动力学仿真,行走时由于瞬间的碰撞会使扭矩和功率偏大。从扭矩曲线图和功率曲线图中可以看出该电机是足以带动该外骨骼机器人完成行走的。另外减小冲击可以采取以下改进措施:将外骨骼机器人的鞋底换成塑料等能缓冲的材料;实际的行走过程可以辅助拐杖来进行;也可以通过不断优化步态来减小冲击。
5 总结与展望
本文结合人体下肢运动机理,提出了残障人士步态特征,主要通过Adams进行仿真分析,根据运动学和动力学仿真结果曲线,得出了行走步态的运动学特征以及受力特征,一一论证了所提出的步态特征,说明所设计的步态特征是合理的,符合残障人士步态特征。同时根据Adams仿真的角速度与角加速度等参数,为电机和减速器的选型提供了重要依据,为进一步设计出一种新型穿戴式下肢助行外骨骼机器人样机提供参考。
总体来说,采用虚拟样机技术避免了物理样机的建造,在设计阶段就可以分析优化各种性能参数和指导零部件的选型,同时也能预测其在实际条件下的整体性能,从而有利于缩短研发周期降低成本。本文主要是结合人体步态研究,并在Adams中建立外骨骼机器人的虚拟样机,通过虚拟样机行走仿真来分析步态特征和步态设计,为步态研究提供一个新的思路,同时也对以后步态规划以及行走的合理性提供依据。
[1] 王一吉, 李建军. 一种可提高和改善步行功能的装置: 动力下肢外骨骼系统的设计及应用[J] . 中国康复理论与实践,2011, 17(7): 628-631
[2] 杨灿军, 陈鹰, 路雨祥. 人机一体化智能系统理论及应用研究探索[J] . 机械工程学报, 2000, 36(6): 42-47
[3] 陈鹰, 杨灿军. 人体智能系统理论与方法[M] . 杭州: 浙江大学出版社, 2006
[4] Kazerooni H, Racine J L, Huang L H, et al. On the control of Berkeley Lower Extremity Exoskeleton (BLEEX)[C]//Proceedings of the 2005 IEEE International Conference on Robotics and Automation. Barcelona: IEEE, 2005: 4353-4360
[5] 张晓超. 下肢康复训练机器人关键技术研究[D].哈尔滨:哈尔滨工程大学,2009
[6] 郑建荣. ADAMS虚拟样机技术入门与提高[M].北京:机械工业出版社,2001
[7] 李增刚. ADAMS入门详解与实例[M].北京:国防工业出版社,2014
[8] 陈占伏,杨秀霞,顾文锦. 下肢外骨骼机械结构的分析与设计[J].计算机仿真,2008,25(8):238-242
[9] 孔祥战. 仿生外骨骼式下肢康复机器人研究[D].天津:河北工业大学,2010
[10] 孙磊. 基于张量判别分析的步态识别算法研究[D].哈尔滨:哈尔滨工业大学,2013
[11] 蔡聪. 基于视频的动物运动跟踪分析系统及应用研究[D].武汉:华中科技大学,2011
[12] Ungerboeck G. Fractional tap-spacing equalizer and consequences for clock recovery in data modems[J]. IEEE Trans on Commun, 1976, 24(8): 856-864
[13] 张博. 正常青年人步态的分析研究[J]. 体育时空,2012(1)24
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
矿山安全信息(2021年21期)2021-07-04
机电信息(2021年17期)2021-07-01
小哥白尼(野生动物)(2021年12期)2021-03-29
矿山安全信息(2020年37期)2020-12-26
内燃机与配件(2020年22期)2020-09-10
矿山安全信息(2020年2期)2020-03-05
矿山安全信息(2020年3期)2020-03-04
西南交通大学学报(2018年6期)2018-12-18
课程教育研究·学法教法研究(2018年14期)2018-08-11
