
矿用管道液位传感器的改进
2015-03-27 12:11:20曲阜师范大学
电子世界 2015年19期
曲阜师范大学 高 原
山东省昌邑市环境保护局 陈雅妮
1 旧式管道液位传感器原理以及存在的问题
离心泵启动前需要判断的是其泵体内部是否灌满了水,而真空度只是一种间接反映指标,并不能准确无误的检测离心泵内部灌水情况,旧式管道液位传感器设计的目的就是准确检测泵体内是否有水。通过两电极之间的直流电压,在电解质中形成电场,使得电解液中离子做定向的运动形成电流,信号采集电路检测出电流信号,同时对该信号进行滤波放大后传给单片机。单片机进行运算处理,将结果发送至报警电路,同时能将开关量信号输出至其他设备,仪器总体框图如图1所示。
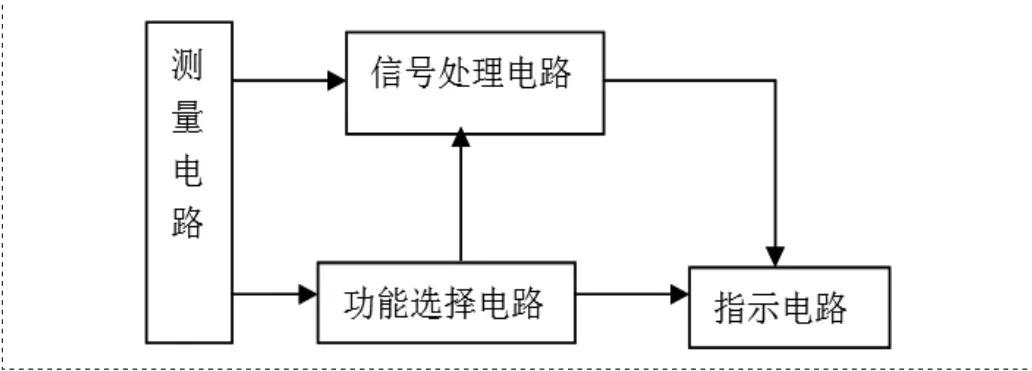
图1 仪器总体框图
使用过程中问题主要有:工作过程中,两电极持续供电,两电极一直产生的电化学反应,阴极会有金属的氧化物或者氢氧化物沉积膜,积累到一定阶段,会导致仪器灵敏度下降;被测液体中往往含有很多固体杂质、碱杂质等悬浮物,它们会在阴极进行囤积,导致电极与液体接触面积减小,甚至阻塞传感器。旧式管道液位传感器利用水的导电性这一特性来判断是否有水,但是由于存在了电化学和吸附效应,使其使用寿命缩短。
2 新式管道液位传感器工作原理
新式传感器考虑通过采用交流脉冲电源供电方式,以减弱电化学效应,传感器两电极采用分时上电的方式。具体原理如图2所示:通过单片机控制电路产生脉冲波形,在一个周期T的时间内,产生一个负脉冲,持续T1时间,在T1时间内采集离散信号;单片机控制电路电极处断电,持续T2时间;在T3时刻,产生一个正脉冲电压信号,且单片机采集离散信号;在T4时间内,单片机控制电路断电。
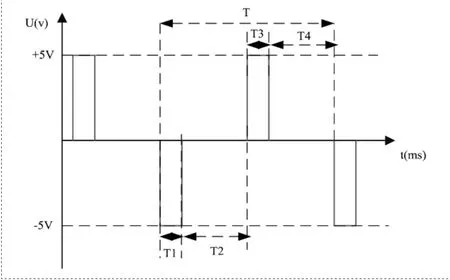
图2 新式管道液位传感器工作原理图
其中测量电路采用电压比较器,当两电极间被测量达到阀值时,发生电平转换,输出动作输出。阀值选择通过电位器调整,以适合不同的应用工况。为方便现场对不同工况条件的调整,设计了功能选择电路,用于现场调整,当选择为调整模式时,将传感器置于工作环境中,调节阀值调节电位器,使指示电路动作,完成调节后,选择到测试模式。信号处理电路核心选择PIC单片机作为主控器,控制传感器延时、灵敏度调节及动作输出等功能。
3 硬件电路具体设计
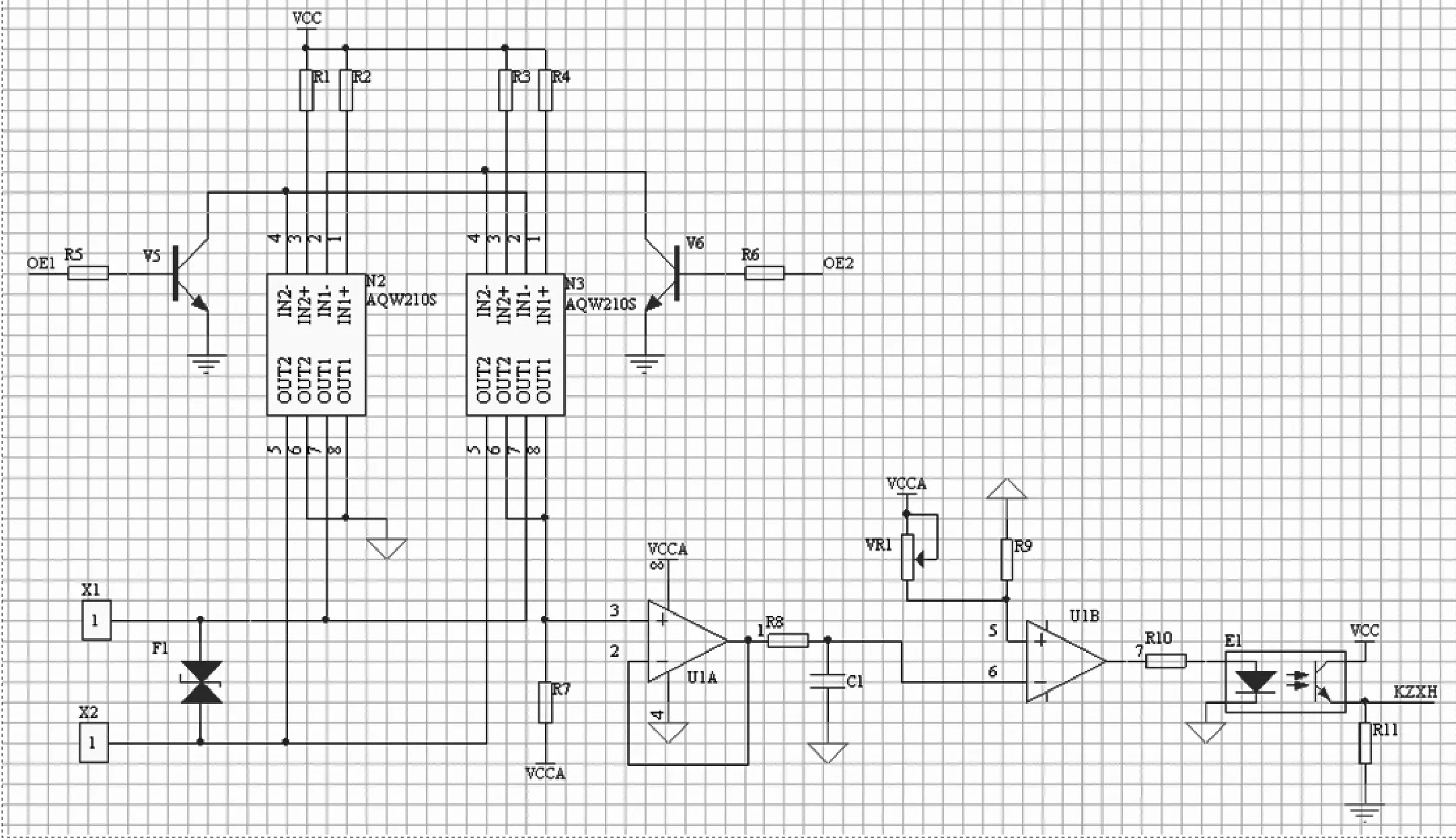
图3 信号采集部分电路具体设计图
信号采集部分电路具体设计如图3所示,X1、X2为两电极,F1为瞬态抑制二极管,避免了来自电极的瞬态高能量冲击。N2、N3为光耦继电器,有效的将控制电路与外部电路实现完全隔离。U1A、U1B为集成运算放大器,U1A用作电压跟随器以提高电路输入阻抗,U1B用作电压比较器,VR1为电位器,用来调节测量的灵敏度。E1为TLP系列光耦,将采集信号与输出信号进行隔离,并把信号传送至单片机端。
单片机通过控制OE1以及OE2两端的电平状态来控制电极的状态,具体控制方式如表1所示。
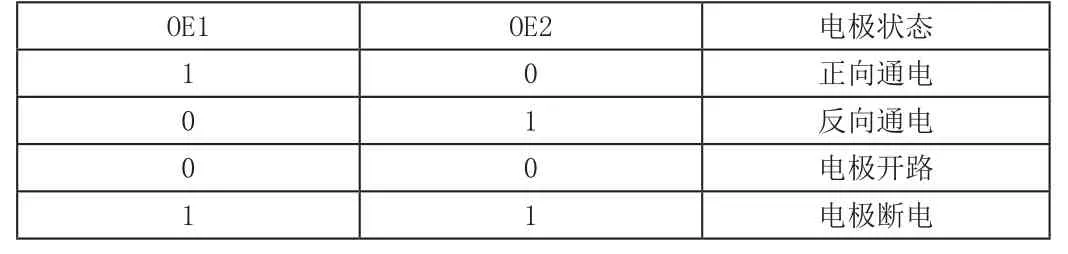
表1 单片机控制方式
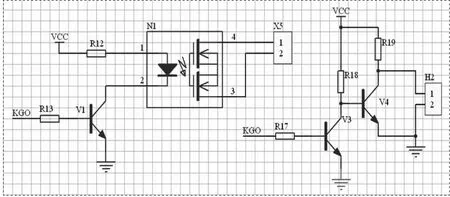
图4 信号输出部分电路图
信号输出电路实现的功能为单片机输出控制信号灯的亮灭,同时将信号传送至其他设备。信号输出部分电路如图4所示,其中N1为光继电器,与三极管等组成信号输出电路,可以产生无源信号。通过两个NPN三极管级联,由单片机控制实现LED灯的亮灭。
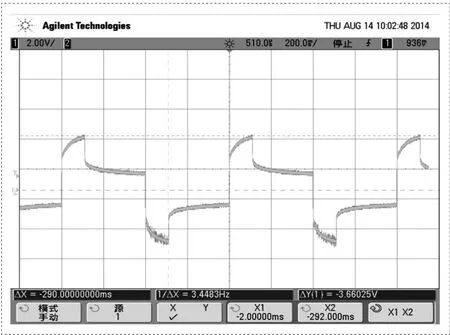
图5
4 实验过程
通过示波器观察记录仪器在被测液体中的充放电情况:如图5所示,在水中时,信号波形为一弧线,上电过程电阻值逐渐增大;当上电时间达到50ms后,被测信号基本稳定;当脉冲发送结束后,电极两端信号维持一段时间且强度逐渐减弱。
通过实测,确定脉冲幅值与宽度,并确定在有脉冲时采样最佳时刻:脉冲发送后50ms采样,脉冲幅值5V,实测最佳。
如图2所示,数据记录如表2所示。

表2 数据记录表
改进前后两电极连续运行两个月效果图如图6所示:
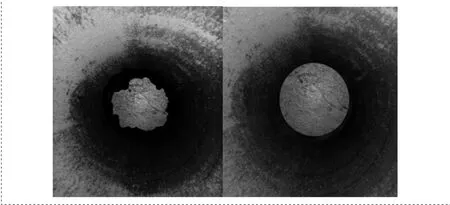
图6 改进前后两电极连续运行两个月效果图
5 改进结论
改进后的传感器比改进前两电极之间的电解吸附明显减弱,使用寿命明显增长,达到了预期效果。
[1]淮文博,高宗海,李大成.霍尔式液位传感器设计与实现[J].机械制造与自动化,2010(03).
[2]谢红,冀少威.液位传感器检测系统的设计[J].应用科技,2009(11).
[3]段辉伟.液位测控技术研究[J].自动化与仪器仪表,2010(01).
猜你喜欢
汽车维护与修理(2019年3期)2019-08-08 02:29:10
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
汽车维护与修理(2017年5期)2017-11-17 01:54:49
中国信息技术教育(2016年23期)2017-01-03 22:24:15
汽车维护与修理(2015年2期)2015-02-28 12:15:41
机械工程师(2014年4期)2014-07-01 23:36:27
中国医疗设备(2013年7期)2013-11-19 03:45:32
