
基于STM32的四旋翼无人飞行器控制系统
2015-03-27 12:11长江大学电子信息学院邓其龙朱耀钟
电子世界 2015年19期
长江大学电子信息学院 邓其龙 朱耀钟
前言
近年来,四旋翼无人飞行器日益受到了研究人员的关注。由于四旋翼无人飞行器具有垂直起降、可携带远程设备、控制灵活等优点,目前已广泛应用于影视、消防、农业、电力系统等领域。
本研究在当前的四旋翼无人飞行器控制理论与技术基础上,选用意法半导体的32位STM32系列微处理器,采用数字三轴陀螺仪MPU6050等传感器设计了硬件系统,利用仿真工具MATLAB设计了非线性控制器-模糊PID控制器,并在此基础上搭建了硬件实验平台,最终完成了预期设计目标。
1 系统工作原理和结构框架
1.1 四旋翼飞行器工作原理
四旋翼无人飞行器使用四个独立的无刷电机作为系统的动力系统,四个电机分别安装在十字机架的四个顶端位置,把同一对角线上的两个电机分为一组,当旋翼1和旋翼3逆时针旋转时,可以产生逆时针方向的扭矩;当旋翼2和旋翼4顺时针旋转时,产生的扭矩是顺时针方向,这样四个电机的反扭矩会被相互抵消,因此通过控制四个电机的转速就能控制四旋翼无人飞行器的飞行姿态。其结构模型如图1所示。四旋翼飞行器在三维空间内共有六个自由度,飞行器的飞行状态主要包括垂直运动、俯仰飞行、横滚飞行以及偏航飞行。
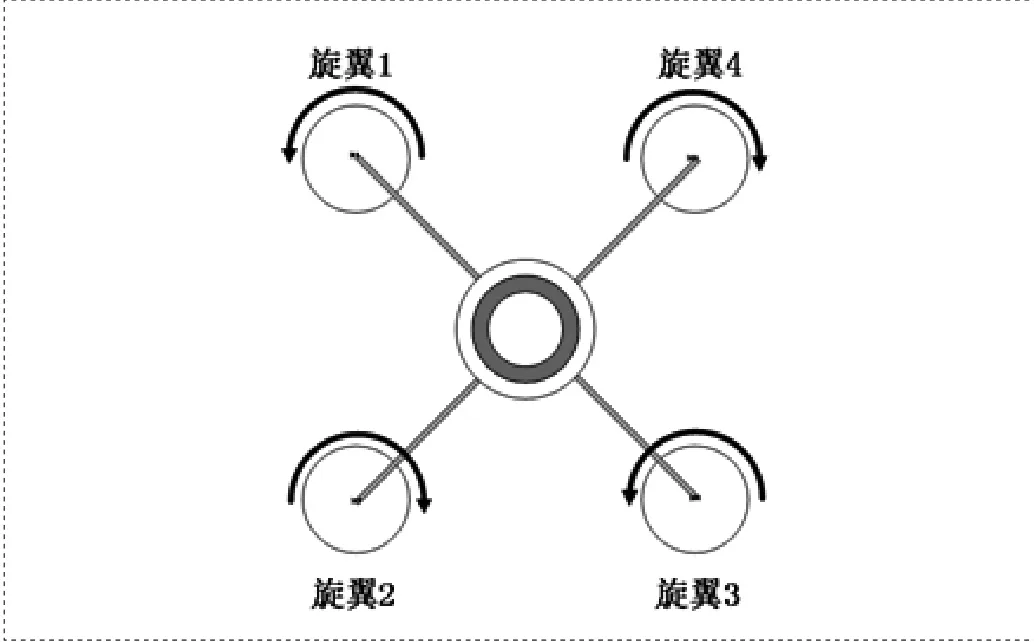
图1 四旋翼无人飞行器结构图
1.2 控制系统总体框架
四旋翼无人飞行器的飞行控制系统由传感器、MCU、电调和电源四大部分组成。传感器用来测量四旋翼无人飞行器飞行时与姿态有关的数据,主控制器根据这些数据、内置状态和地面遥控指令进行综合分析处理 ,然后输出4路 PWM脉冲控制电调从而改变电机转速,实现预期的飞行姿态。
2 系统硬件设计
本设计采用意法半导体的STM32F103ZET6作为系统的主控制器,高达72MHz主频,具备DMA单元,有多达24路的PWM输出和12位高精度ADC。它主要负责传感器数据采集,数据处理,姿态解算算法,PID算法以及遥控信号的解码用来接收和发送数据和命令。控制系统结构图如图2所示。

图2 控制系统结构
2.1 传感器模块
四旋翼无人飞行器的飞行姿态可以用6个物理量表示,即三维坐标中的3个位置量和沿3个轴的姿态量,称为六自由度。陀螺仪的作用是测量四旋翼飞行器的角速率,在惯性导航系统中非常重要,陀螺仪选型的依据是精度和稳定性。选用应美盛公司的MPU6050,MPU6050整合了3轴陀螺仪、3轴加速器计。MPU6050的角速度全格感测范围设定为±250/sec(dps),可准确追踪快、慢速动作,该传感器传输可透过最高至400kHz的I2C接口,可以精确采集四旋翼飞行器3个方向的角速率和线加速度。由于导航参数会随传感器的测量误差积累而发散,因此在惯性导航算法中不能长时间自主飞行,故选用霍尼韦尔公司的三轴式数字罗盘HMC5883校准惯性导航系统的姿态,HMC5883采用I2C通信协议,无需额外的转换电路即可和STM32的硬件I2C接口通信。
2.2 无线通信模块
无线通信模块是四旋翼无人飞行器和地面遥控通信的桥梁。本研究要求的无线传输距离小于100m。利用nRF24L01+进行无线通信,它是一款工作在2.4~2.5GHz世界通用ISM 频段的单片无线收发器芯片。通过SPI接口与MCU连接,速率0~8Mbps,支持2Mbps、1Mbps和250kbps传输速率,支持自动应答及自动重发,内置地址及CRC数据校验模功能。使用方便,在100m之内传输稳定可靠。最终可实现遥控装置与飞行控制器的通信要求。
2.3 电机控制模块
本研究采用自主开发的电调控制无刷电机。STM32输出PWM脉冲信号控制电调,对电机转速进行调整,从而控制飞行姿态。控制方式为调整输出PWM周期为10ms,停车为1ms高电平,最大油门值为2ms高电平。
3 系统软件设计
四旋翼无人飞行器是一个欠驱动系统,它具有4输入6输出。由于四旋翼无人飞行器对称的结构设计,使得四轴在俯仰角的控制与横滚角的控制上有着近乎相同的控制特性,且两者相对独立。四轴飞行器的俯仰,横滚,偏航,升降可以通过四个输入量来控制。飞行控制系统微处理器主要完成各个模块的初始化、系统自检、解算传感器数据、遥控信息解算、执行控制算法、计算并输出控制量等功能。通过信号量和消息队列实现了各任务间数据的相互交换和同步。
4 结束语
本研究用STM32单片机作为系统的控制器,利用Mat l ab模糊工具箱设计了模糊PID控制器,并给出了基于STM32单片机的四旋翼无人飞行器控制系统的硬、软件设计方案,通过实际搭建硬件测试平台,达到了预期的设计目标。
[1]聂博文.四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-117.
[2]朱君.四旋翼无人飞行器控制系统设计及控制方法研究[D].内蒙古科技大学硕士学位论文,2012.
[3]孙怡.基于模糊PID控制的多电机同步控制[D].华南理工大学硕士学位论文,2012.
[4]李俊,李运堂.四旋翼飞行器的动力学建模与PID控制[J].辽宁工程技术大学学报,2012,31(1):114-117.
[5]黄溪流.四旋翼无人直升机飞行控制器的设计[D].南京:南京理工大学,2010.
[6]齐书浩.四旋翼飞行器总体设计及其运动控制[D].上海: 上海交通大学,2013.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
学生天地(2020年3期)2020-08-25
电子制作(2019年9期)2019-05-30
汽车观察(2018年9期)2018-10-23
中国自行车(2018年8期)2018-09-26
电子制作(2018年2期)2018-04-18
北京航空航天大学学报(2016年8期)2016-11-16
小朋友·快乐手工(2015年5期)2015-06-06
