
基于次锚节点的无线传感器网络改进加权质心定位算法
2015-03-26 07:59:56张先超刘兴长张春园
传感器与微系统 2015年2期
张先超,刘兴长,张春园
(后勤工程学院 后勤信息与军事物流工程系,重庆401311)
0 引 言
无线传感器网络(wireless sensor networks,WSNs)是由随机部署在目标区域内的数量巨大的离散传感器节点组成,通过无线通信方式形成的一个多跳的自组织网络系统[1]。节点的位置信息对无线传感器网络十分重要,是其支撑技术,并且具有广泛的应用[2]。研究提高定位精度是当前无线传感器网络研究的热点[3~7]。
无线传感器网络的定位技术可分为两类:基于测距(range-based)的技术和无需测距(range-free)的技术[8]。到达时间差(time difference of arrival,TDOA)测距技术广泛应用于无线传感器网络定位,在不考虑非视距(NLOS)误差的情况下可取得较高的测距精度[9]。基于TDOA 测距的粒子群优化(PSO)无线传感器网络定位算法可比较准确地估计节点位置,但需要额外测距设备,增加了节点能耗。基于接收信号强度指示(RSSI)的加权质心算法通信开销小,算法简单[10],但定位覆盖率和定位精度受锚节点数目影响较大。
本文提出了一种基于次锚节点的改进加权质心定位算法(IWCLA-SAN),以克服加权质心定位算法(WCLA)对锚节点数量要求较高和定位精度较低的缺陷。
1 粒子群优化定位算法
文献[11,12]将粒子群优化算法应用于无线传感器网络定位中,验证了该定位算法的可靠性。粒子群优化算法的实现原理如下:
假设在D 维的搜索空间内,存在一个种群大小为M 的粒子群,即无线传感器网络中的锚节点;存在一个数量为N的搜索目标群,即无线传感器网络中的未知节点。每个粒子在空间中的位置坐标xi=(xi1,xi2,…,xid),搜索速度vi=(vi1,vi2,…,vid),搜索到的个体最优位置为pi=(pi1,pi2,…,pid),搜索到的全局最优位置为gb=(gb1,gb2,…,gbd),其中,i=1,2,…,M,d=1,2,…,D。该算法采用下列公式对粒子操作
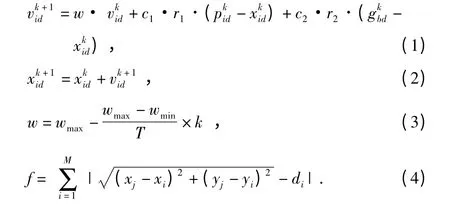
学习因子c1和c2是非负的常数,常设c1=c2=2;r1和r2是介于[0,1]的随机数;w 为惯性权重,用来保持局部搜索和全局搜索的平衡,较大的w 有利于算法的全局搜索能力,较小的w 有利于算法的局部搜索能力;vid∈[-vmax,vmax],vmax太大容易使粒子飞离最优解,vmax太小容易使粒子陷入局部最优,粒子的速度通常设为每维变换范围的10%~20%;k 为当前迭代次数,T 为终止迭代次数;f 为适应度函数,di为未知节点到各锚节点的距离;锚节点的坐标Ai(xi,yi),未知节点坐标Nj(xj,yj),其中,i=1,2,…,M,j=1,2,…,N。
2 测距原理与质心定位算法
2.1 RSSI 测距原理
节点在通信时可以直接获取RSSI 值,估计出未知节点与锚节点的距离。针对室外定位环境,文中采用自由空间传播模型(free space propagation model)和对数—常态分布(log-normal distribution)模型,用于分析和仿真[13]。自由空间模型无线信道的数学模型如下

对数—常态分布模型无线信道的数学模型如下

式中 PL(d0)为距离锚节点d0处的信号强度;PL(d)为距离锚节点d 处的信号强度;d 为未知节点与锚节点之间的距离;f 为频率;d0为参考距离,一般取为1 m,将d=1 m 代入式(6)得到Loss,即PL(d0)的值;n 为信道衰减指数,一般取值2~4;Xδ为均值为零、方差δ 的高斯随机噪声变量。
通常情况下,测距误差随着测量距离的增加而增大[14],即较大的RSSI 值计算得到的距离值误差较小,而较小的RSSI 值计算得到的距离值误差较大。
2.2 质心定位算法


图1 CLA 示意图Fig 1 Schematic diagram of centroid localization algorithm
2.3 WCLA
WCLA 通过对不同的锚节点赋予不同权值,达到了提高定位精度的目的。通常加权值是未知节点到锚节点距离的函数[15],一般将未知节点与锚节点距离的倒数作为加权值,得到加权质心定位算法,其计算公式为

式中 (xi,yi)为锚节点的坐标,wi为加权因子,di为未知节点到锚节点的距离,i=1,2,…,n。
2.4 IWCLA
为了更加体现未知节点到通信范围各锚节点距离对定位精度的影响,提出一种修正系数不固定的IWCLA。该算法对加权因子进行改进,设其为

其中,k 为修正系数,设定为

其中,D 为未知节点到通信范围内锚节点距离集合元素方差的归一化值,D 值的大小反映了未知节点通信范围内各锚节点分布的均匀程度,分布越均匀D 值越小。根据D 值的不同设定k 的值,使得计算不同未知节点的坐标时,修正系数k 的值不同。如图2 所示,对于锚节点分布均匀程度不同的两种情况,图2(a)的k 值大于图2(b)的。本文根据通信范围内各锚节点分布的均匀程度设定k 值,这样更能增加距离未知节点较近的锚节点的权重,减少距离较远的锚节点的权重。因此,与WCLA 相比,定位精度进一步提高。
2.5 IWCLA 描述
IWCLA 的定位步骤如下:
1)锚节点周期性发送自身节点ID 和自身节点位置信息,与邻居节点进行通信。
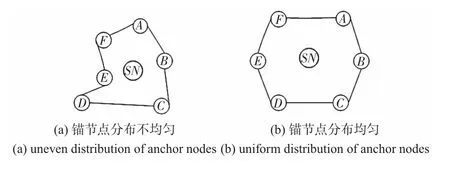
图2 锚节点分布图Fig 2 Diagram of anchor nodes distribution
2)未知节点收到锚节点信息后,分别记录同一个锚节点的RSSI 均值。
3)根据公式(6)计算出未知节点到各锚节点的距离di。
4)当未知节点接收到的锚节点信息达到阈值N 时,建立以下3 个集合:
锚节点集合Sbeacon={a1,a2,…,an};锚节点位置集合Sposition={(x1,y1),(x2,y2),…,(xn,yn)};未知节点到锚节点的距离集合Sd={d1,d2,…,dn}。
5)对未知节点到锚节点的距离集合中的各元素按从小到大依次排序,组成新的集合;对应的新的锚节点位置集合。由2.1 节分析可知,距离值越小,测距越准确,故优选距离值较小的锚节点估计未知节点坐标,以提高定位精度。
7)根据公式(7)计算出未知节点的坐标(X,Y)。
2.6 仿真与分析
利用Matlab 软件进行仿真。设锚节点数量为M,未知节点数量为N,锚节点和未知节点均随机分布在室外100 m×100 m 的区域内;通信半径r=30 m;信道衰减指数n=3.2,高斯随机噪声变量Xδ的标准差取为4,不考虑NLOS 误差对定位结果的影响。
设锚节点数目为50,未知节点数目为20。图3 为三种算法的定位误差,对于大多数未知节点,IWCLA 的定位误差明显低于其它两种CLA。
设定不同的锚节点个数,在每种锚节点个数情况下,独立进行30 次实验求出平均定位误差。图4 反映了三种定位算法平均定位误差与锚节点数目关系。锚节点数目越多,三种定位算法的平均定位误差越小,且IWCLA 定位效果始终优于另外二种定位算法。
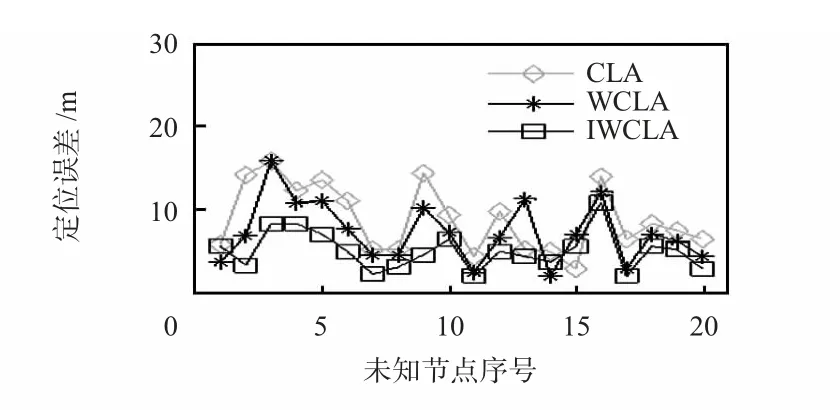
图3 各未知节点的定位误差Fig 3 Positioning error of each unknown node

图4 锚节点数目对定位精度的影响Fig 4 Influence of number of anchor node on positioning precision
3 IWCLA-SAN
3.1 算法描述
锚节点的数量对IWCLA 的定位精度和定位覆盖率有很大影响,但带有GPS 的锚节点造价是普通节点的10 倍,不适宜大规模部署。为了提高IWCLA 的定位精度和定位覆盖率,本文将基于TDOA 测距的粒子群优化定位算法的未知节点升级为次锚节点(SAN),再采用IWCLA 对其它未知节点进行定位。
3.2 仿真与分析
设锚节点数量为M,SAN 数为R,未知节点数量为N,锚节点、SAN 和未知节点均随机分布在室外100 m×100 m的区域内;通信半径r=30 m;信道衰减指数n=3.2,高斯随机噪声变量Xδ的标准差取为4,不考虑NLOS 误差对定位结果的影响。
在锚节点数目有限的情况下,研究加入SAN 对定位精度的影响。设锚节点数目依次为10,20,30,40,50;SAN 数目为20;未知节点数目为20。分别独立进行30 次实验,求出平均定位误差和定位覆盖率。由图5、图6 可知,IWCLASAN 与IWCLA 相比可以一定程度上提高定位精度和定位覆盖率。尽管将未知节点升级为SAN 会带来一定的误差累积,但基于TDOA 测距的粒子群优化无线传感器网络定位算法具有较高定位精度,将其作为SAN 具有一定可靠度。
4 结束语

图5 锚节点数目对定位精度的影响Fig 5 Influence of number of anchor node on positioning precision

图6 锚节点数目对定位覆盖率的影响Fig 6 Influence of number of anchor node on localization coverage rate
本文针对定位精度较低的缺陷,在加权因子中引入了修正系数;针对CLA 对锚节点数量要求较高的缺陷,为减少锚节点数量,降低成本,将基于TDOA 测距的粒子群优化无线传感器网络定位算法的未知节点升级为SAN。本文提出的IWCLA 定位精度相较于WCLA 有较大提高;在锚节点数目有限的情况下,加入SAN 可以提高定位精度和定位覆盖率。但本文并未考虑NLOS 误差对定位精度的影响,这需进一步研究该算法在NLOS 环境中的可靠性。
[1] 宋 文,王 兵,周应兵,等.无线传感器网络技术与应用[M].北京:电子工业出版社,2007:1-10.
[2] 孙利民,李建中.无线传感器网络[M].北京:清华大学出版社,2005:135-154.
[3] Li F F,Luo F,Wang J X,et al.An effective self-adapting localization algorithm in wireless sensor networks[J].J of Applied Mechanics and Materials,2011,58-60:1013-1017.
[4] Jian L R,Zheng Y,Liu Y H.Beyond triangle inequality:Sifting noisy and outlier distance measurements for localization[C]∥Proc of IEEE INFOCOM 2010,San Diego:IEEE,2010:1-9.
[5] Kung H T,Lin C K,Lin T H,et al.Localization with snap-inducing shaped residuals:Coping with errors in measurement[C]∥Proc of MobiCom 2009,Beijing:ACM,2009:333-344.
[6] Li Z,Trappe W,Zhang Y,et al.Robust statistical methods for securing wireless localization in sensor networks[C]∥Proc of IPSN 2005,Los Angeles:IEEE,2005:91-98.
[7] Zhang Q X,Di Q L,Xu G Y,et al.A RSSI-based localization algorithm for multiple mobile robots[C]∥Proc of CMCE 10,Changchun:IEEE,2010:190-193.
[8] 李晓维,徐勇军,任丰原.无线传感器网络技术[M].北京:北京理工大学出版社,2007:191-199.
[9] 彭 宇,王 丹.无线传感器网络定位技术综述[J].电子测量与仪器学报,2011,25(5):389-399.
[10]方 震,赵 湛,郭 鹏,等.基于RSSI 测距分析[J].传感技术学报,2007,20(11):2526-2530.
[11]王晓乐,徐家品.基于粒子群优化算法的WSNs 节点定位研究定位[J].计算机应用,2009,29(2):494-499.
[12]邢明彦,李腊元.粒子群优化算法在无线传感器网络中的应用[J].计算机工程与应用,2009,45(32):72-74.
[13]陈维克,李文锋,首 珩,等.基于RSSI 的无线传感器网络加权质心算法定位[J].武汉理工大学学报,2006,30(2):265-268.
[14]Chen W,Mei T,Sun L,et al.Error analyzing for RSSI-based localization in wireless sensor networks[C]∥7th World Congress on Intelligent Control and Automation,WCICA 2008,IEEE,2008:2701-2706.
[15]杨新宇,孔庆茹,戴湘军.一种改进的加权质心定位算法[J].西安交通大学学报,2010,44(8):1-4.
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
科学(2020年3期)2020-01-06 04:02:51
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
测控技术(2018年10期)2018-11-25 09:35:54
浙江工业大学学报(2017年5期)2018-01-22 02:03:46
电子制作(2017年7期)2017-06-05 09:36:13
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
物理与工程(2014年4期)2014-02-27 11:23:08
