
三维柔性触觉/热觉传感器设计与仿真
2015-03-26 07:59谢娜,秦岚
传感器与微系统 2015年2期
谢 娜,秦 岚
(重庆大学 光电工程学院,重庆400044)
0 引 言
触觉在机器人感觉系统中占有非常重要的地位,它具有视觉无法实现的功能。视觉借助光的作用完成,当光照受限制时,紧靠触觉也能完成识别功能。更为重要的是,触觉还能感知物体的表面特征和物理性能,如柔软性、硬度、弹性、粗糙度、材质等,因此,触觉传感器是机器人感觉系统中最重要的研究课题之一。
目前的触觉传感器主要有压阻式、电容式、光纤式、磁敏式和压电式。压阻式阵列触觉传感器[1,2]的体积较大,信号采集电路复杂,不易集成,并且力敏电阻器漏电流不稳定,易老化。电容式[3,4]触觉传感器的电容值随传感器单元物理尺寸的增加而增加,漂移信号影响传感器输出。光纤式传感器[5]在两向力以上共同作用时,很难保持好的线性关系,传感器的标定存在难度,精度难以提高。磁敏Z 元件[6]构成的触觉传感器,各个触觉传感点上较难做到一致性,磁铁的磁场分布不均匀,分辨率也很难提高,后续的电路处理也较麻烦。目前,压电式[7~10]应用最广,也能同时检测触觉和滑觉信号,但触觉信号和滑觉信号的分离存在一定困难。
本文提出了基于聚偏氟乙烯(PVDF)的触觉/热觉传感器,该传感器具有结构简单、柔韧性好、体积小、易集成等特点,适合嫁接于智能机器人系统。针对PVDF 具有压电效应和热释电效应的双重敏感特性,在传感器的结构设计上采用分离的两个物理检测空间:触觉检测区和触觉、热觉检测区,很好地解决了用PVDF 做敏感材料易发生的触觉和热觉信号的混淆问题。
1 触觉检测
PVDF 薄膜是一种压电高聚合物材料,具有耐磨、量轻、灵敏度高、声学阻抗低、容易固定在复杂的表面、频带宽等特点。传感器结构及其受力如图1 所示。
由传感器结构的对称性可得:当沿X 方向施加载荷时,PVDF-A(或是PVDF-B)压电薄膜的一端被拉伸,另一端被压缩,由PVDF 薄膜的压电特性,在薄膜拉伸端和压缩端产生电荷量近似相等、符号相反的电荷,从而使得薄膜两侧的响应电荷相互抵消,整片薄膜对外显示电荷几乎为零,其两侧的电势也为零。在外力的作用下,PVDF 薄膜两侧产生的电荷与施加的载荷呈正比,进而可认为FAX和FBX为零,即X 方向的受力时,其对A,B 面上的电压响应无影响;同理可得Y 方向的受力对C,D 面上的电压响应无影响,FCY,FDY的值为零;X 方向的受力对C 片和D 片的电压响应值大小相等,符号相反;Y 方向的受力对A 片和B 片的电压响应值大小相等,符号相反;Z 方向的受力对A,B,C,D 各片上的电压响应相同,即可得到如下式子
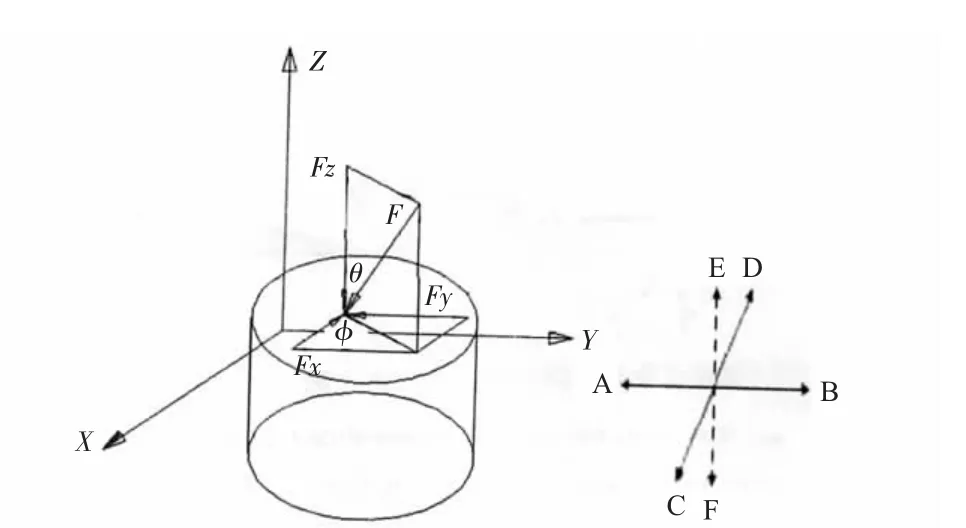
图1 触觉传感器结构及其受力分析Fig 1 Structure of tactile sensor and stress analysis
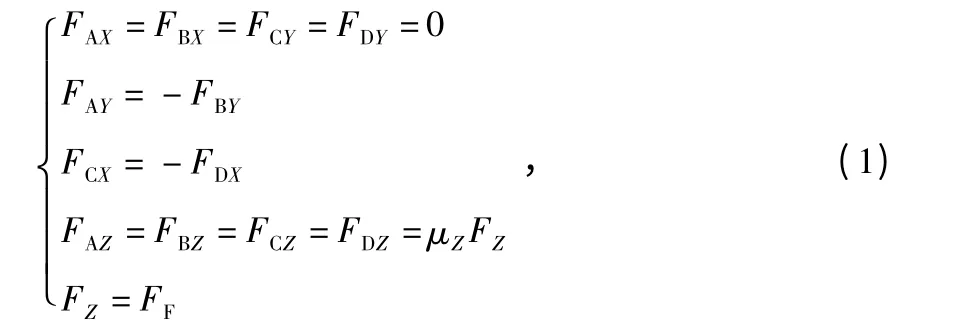
式中 FA,FB,FC,FD分别代表PVDF 薄膜A,B,C,D 所受的三维力,FAX,FBX,FCX,FDX分别代表A,B,C,D 薄膜X 方向的受力,FAY,FBY,FCY,FDY分别代表A,B,C,D 薄膜Y 方向的受力,FAZ,FBZ,FCZ,FDZ分别代表A,B,C,D 薄膜Z 方向的受力,从而
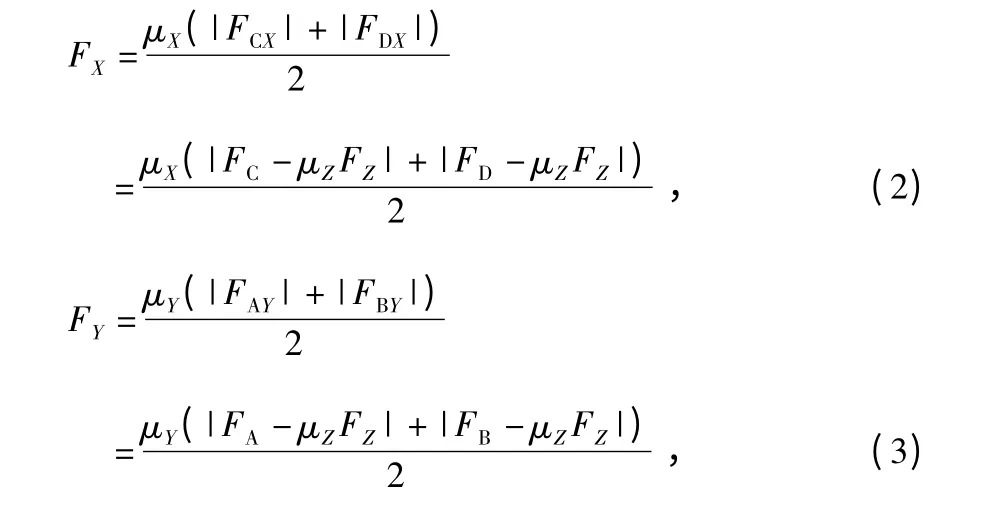
式中 μX,μY,μZ分别为力沿X,Y,Z 方向力的传递因素,可通过实验测出。通过力的合成可得

PVDF 薄膜的响应电压与施加的外力呈正比从而通过A,B,C,D,F 膜上的电压值即可求出FA,FB,FC,FD,FF,进而可以求出未知量φ,F,θ,即实现三维力的检测功能。
2 热觉检测
PVDF 不仅具有压电性,还具有强热释电效应。触/热觉传感器的结构剖面图如图2 所示。
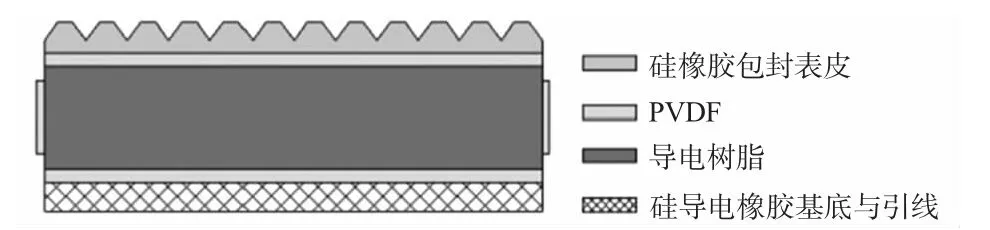
图2 触/热觉传感器的结构剖面图Fig 2 Structure profile of tactile/thermal sensor
传感器表面是一层柔软的带有圆锥体小齿的橡胶包封,敏感层为上、下、侧面PVDF 层。柔软的硅橡胶营造三个测试空间,即上层触觉/热觉测试,侧面三维力测试与下层PVDF 触压信号的检测。此种结构使触觉信号基本不受传感器接触物体后热传导的影响。
当传感器接触目标物体后,由于传感器表面温度高于/低于物体温度,发生热传导现象,传感器表面温度下降/上升,即上层PVDF 有触压、热混合信号输出。由于物体仅与传感器的上表面接触,又有隔热层(硅橡胶)的保护,热信号作用对下层和侧面PVDF 几乎无影响,即下层和侧面PVDF 只有触压信号。下层PVDF 信号和上层PVDF 信号综合处理后可彻底区分热觉和触觉信号。
3 信号特征和提取
一般的触压信号响应和衰减较快(频率高),热觉信号为缓变的低频信号。当传感器表面触压目标物时,上层PVDF 产生触觉和热觉混合信号FE,下层PVDF 产生单一的触觉信号FF,其幅值略小于上层PVDF 的信号。如图3所示。将两个信号间做比例减法运算,从而彻底区分触觉和热觉信号。
4 仿真结果分析
Ansys 通用后处理器(POST1)和时间历程后处理器(POST26)具有丰富的后处理功能,可以通过很多方式进行分析:从简单的图形显示和列表,到复杂的数据操作等。通过实验可得如下数据:
1)X 轴施加-10~10 N 力时各压电薄膜的电压响应如图4 所示。
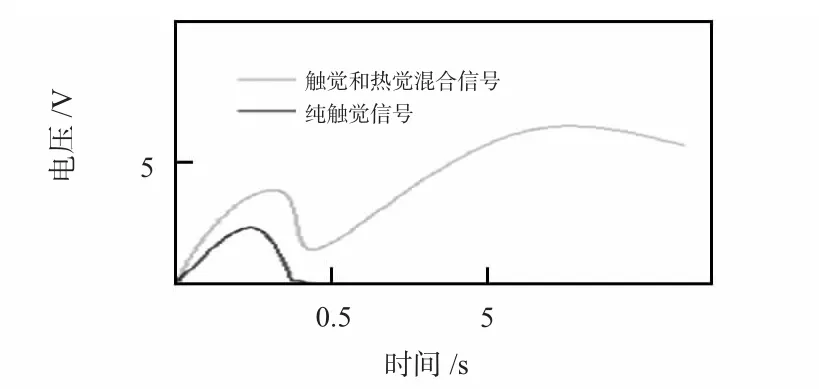
图3 传感器的响应信号特征Fig 3 Characteristics of response signal of sensor
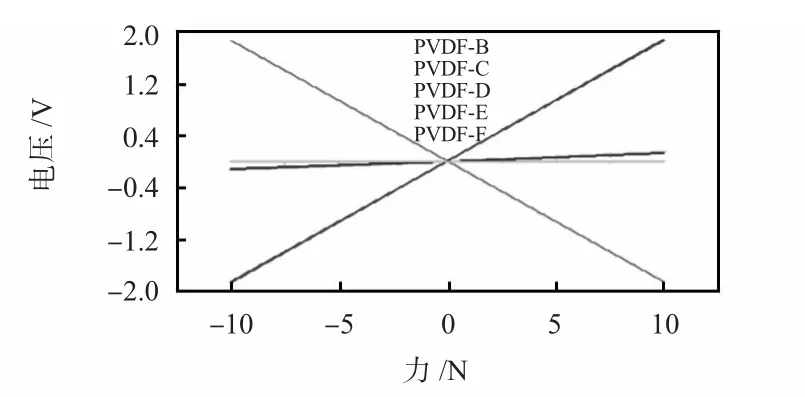
图4 X 轴施加-10~10 N 力时各压电薄膜的电压响应Fig 4 Voltage response of each piezoelectric film force while X axis is applied -10~10 N
从图可以看出,FX对A,B,E,F 面上的电压几乎无影响,从而通过检测C,D 薄膜的响应电压值即可求出力FX,与公式(1)和式(2)的推导相吻合。
2)Y 轴施加-10~10 N 力时各压电薄膜的电压响应如图5 所示。
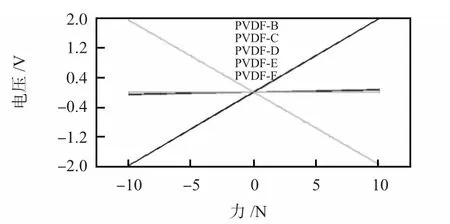
图5 Y 轴施加-10~10 N 力时各压电薄膜的电压响应Fig 5 Voltage response of each piezoelectric film force while Y axis is applied -10~10 N
从图可以看出:Fy对C,D,E,F 面上的电压几乎无影响,通过检测A,B 电压即可求得力Fy,满足公式(1)和式(3)的推导。
3)Z 轴施加-10~10 N 时各压电薄膜的电压响应如图6所示。
图6(a)是沿Z 轴施加-10~10 N 时,薄膜A,B,C,D各压电薄膜的电压响应,可以看出Fz对A,B,C,D 面上的电压影响几乎相同;图6(b)是PVDF 薄膜E,F 沿Z 轴施加-10~10 N 时各压电薄膜的电压响应,Fz对E,F 面上的电压影响相同,通过检测F 电压即可求得力Fz,与公式(1)推导吻合。
研究的对象为半径为2 mm,厚度为100 μm 的PVDF 薄膜圆盘,此薄膜的电容C=10 pF,选用的PVDF 薄膜的热释电系数为4 μC/cm2·K,其等效赛贝克系数为5 V/K,即当温度变化1 ℃时,PVDF 薄膜两侧将会产生5 V 的电压。
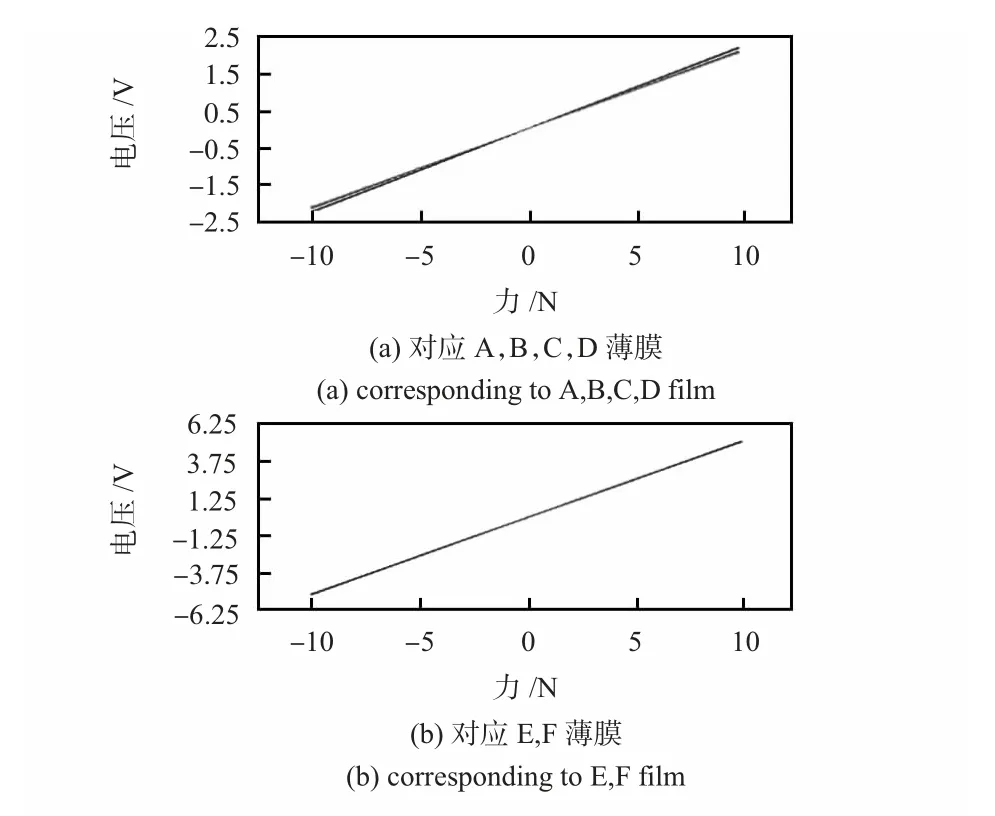
图6 Z 轴施加-10~10 N 时各压电薄膜的电压响应Fig 6 Voltage response of each piezoelectric film force while Z axis is applied -10~10 N
当温度变化1 ℃时,触觉/热觉传感器的电势如图7 所示。从图中可以看出,只有PVDF 薄膜E 有电压产生,当其它的PVDF 薄膜温度未发生变化时,不会因热释电效应产生电压响应,可以利用PVDF 薄膜E,F 的两个信号间做比例减法运算,彻底地区分触觉和热觉信号。利用热释电效应产生的电压信号,从而可以求解与触觉/热觉传感器接触的目标物体的热觉信息。
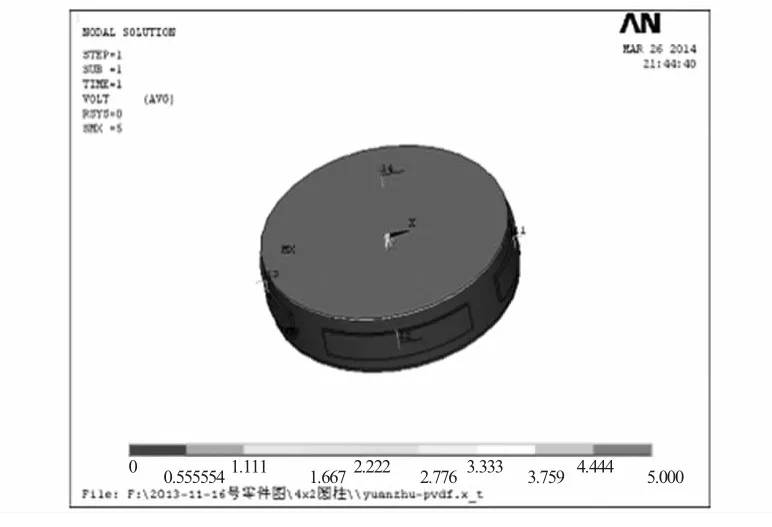
图7 温度变化1 ℃时传感器的电势图Fig 7 Potential diagram of sensor while 1 ℃change in temperature
5 结 论
通过仿真结果的分析可以看出:数据的分布与推导的公式具有较好的一致性,说明所设计的三维力触觉/热觉传感器具有可行性,对机器人触觉传感器的研究具有一定的推动作用。
[1] Noda K,Hoshino K,Matsumoto K,et al.A shear stress sensor for tactile sensing with the piezore-sistive cantilever standing in elastic material[J].Sensors and Actuators A:Physical,2006,127:295-301.
[2] Wisitsoraat A,Patthanasetakul V,Lomas T,et al.Low cost thin film based piezoresistive MEMS tactile sensor[J].Sensors and Actuators A,2007,139:17-22.
[3] 沈国伟.电容式触觉阵列传感器原理与设计[J].传感器世界,2007(3):13-15.
[4] Schmidt P A,Mael E,Wurtz R P.A sensor for dynamic tactile information with applications in human-robot interaction and object exploration[J].Robotics and Autonomous Systems,2006,54:1005-1014.
[5] Heo J S,Chung J H,Lee J J.Tactile sensor arrays using fiber Bragg grating sensors[J].Sensors and Actuators A,2006,126:312-327.
[6] 王福君,刘 莉.基于磁敏Z 元件触觉传感器的研制[J].电测与仪表,2000,37(3):37-38.
[7] 姜明文,王人成,罗志增,等.具有触滑觉功能的肌电假手[J].清华大学学报:自然科学版,2004,44(8):1051-1053.
[8] Wen C C,Fang Weileun.Tuning the sensing range-land sensitivity of three-axis tactile sensors using the polymer composite membrane[J].Sensors and Actuators A,2008,145:14-22.
[9] 赵东斌,张文增,都 东,等.机器人用PVDF 触觉传感器的国内外研究现状[J].压电与声光,2001,23(6):428-432.
[10]潘英俊,刘嘉敏,乔生仁.新型三维力觉传感器的设计与分析[J].压电与声光,2001,23(5):349-350.
猜你喜欢
海外星云(2021年6期)2021-10-14
压电与声光(2019年1期)2019-02-22
中南民族大学学报(自然科学版)(2018年4期)2018-12-29
铜仁学院学报(2018年6期)2018-07-05
特别健康(2018年3期)2018-07-04
工业设计(2016年4期)2016-05-04
工业设计(2016年10期)2016-04-16
中国塑料(2015年3期)2015-11-27
中国塑料(2015年9期)2015-10-14
中国塑料(2015年5期)2015-10-14
