
水下便携式三维声纳实时成像系统设计*
2015-03-26 07:59陈加洋陈耀武
传感器与微系统 2015年2期
陈加洋,陈耀武
(浙江大学 数字技术及仪器研究所,浙江 杭州310027)
0 引 言
电磁波在水下衰减速率快,抗干扰能力差,而声纳信号传播性好,穿透性强,通过声纳系统来进行场景成像已成为水下探测的最有效手段[1]。利用三维声纳成像技术可以探测静止或运动目标的细节特征,并提供多视角观察,在多个领域都具备广泛的应用前景[2]。
目前,三维实时成像声纳装置主要被安装在船体上,如英国Coda Octopus 公司的Echoscope Mark Ⅱ型声纳系统[3],或者将换能器安装在能够旋转方位的水下机器人上,如美国RESON 公司开发的数字声纳设备Sea-Bat8128[4]。而此类声纳系统的阵元规模都比较大,设备笨重,在浅港、内河等水域难以胜任精确探测复杂水下环境和水下灵活作业的任务。
本文设计并实现了便携式三维声纳实时成像系统,以相互垂直的发射接收阵元,通过不同频率的声脉冲信号透射观察体积,经过实时图像处理和显示模块得到三维声纳图像[5],使得蛙人能够在水下实时获得目标的声学图像,可用于浅水水域的精确探测。
1 系统原理和结构
如图1 所示,假设在二维空间的远场有一个单频声波信号源B cos ωt,频率为f,波长λ,传播速度为c,距离为D,接收阵元等间距排列,距离为d。当信号源满足远场条件时(D≥d2/λ),回波信号可以被看为一个平面,信号的入射角为α,则相邻阵元的波程差l=d·sin α,由此可得出相邻阵元间的接收时延τ=d·sin α/c,相位差θ=2πfd·sin α/c,相应第p 个阵元接收到的回波信号为

将所有阵元的回波信号进行叠加,并经过几何级数求和后可得

由表达式(2)可以看出叠加信号的大小取决于各信号的相位差θ,当θ 为0 时,即回波信号垂直于线阵入射时,接收到的能量达到最大值。
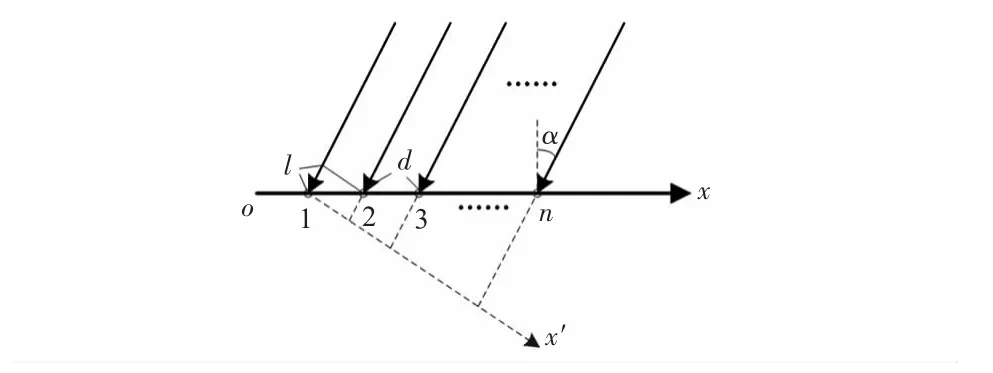
图1 线阵接收回波示意图Fig 1 Schematic diagram of echo receiving by line array
波束形成的基本原理是为了得到与直线阵元成某一角度α 方向上的波束信号,对n 个阵元接收到的回波信号进行不同的延时补偿和相位补偿,使这一方向上的信号在x'轴上同相叠加,而其他方向的回波信号则相互抵消衰减,从而达到基于方向的空间滤波效果[6]。
便携式三维声纳系统的结构如图2 所示,设备可与船体通过线缆相连或者离线工作。液晶显示屏安装在基板下方,与信号处理板连接,实时显示水下三维图像和多项系统参数。电源板可在线缆提供的外部电源和电池电源之间切换,为各板提供数字电和模拟电,基板负责板间互连和结构固定。

图2 系统结构3D 示意图Fig 2 3D schematic diagram of system structure
声纳发射阵和接收阵被安装在前面板上,探测水平方向120°,垂直方向75°范围内的物体。利用波束形成原理,垂直发射线阵的阵元通过不同的相位差向探测空间的各个方向发射多路声纳脉冲信号,每个方向采用一种频率,用于定位垂直方向,如图3 所示,发射阵元材料选用PZT—4 型压电陶瓷,具有较高的机电耦合系数。水平接收阵材料选用PZT—5 压电陶瓷,具有良好的响应特性,获取的回波信号经过带通滤波后同样利用波束形成原理添加相位和延时补偿,将各路阵元结果叠加后得到所需水平方向上的最强信号。经过多轮的发射和接收循环最终在显示屏上刷新出成像结果,实现水下三维探测。

图3 波束发射示意图Fig 3 Schematic diagram of beam transmission
2 系统实现
2.1 硬件设计
如图4 所示,系统硬件主要由信号处理板、接收板和发射板组成。信号处理板完成75 路发射信号的产生和二级波束信号处理,实现与液晶屏之间的命令和数据通信,并将采集到的数据上传到上位机。接收板连接水平接收阵的120 路换能器,完成信号调理和一级波束形成。发射板用于驱动垂直发射线阵工作。
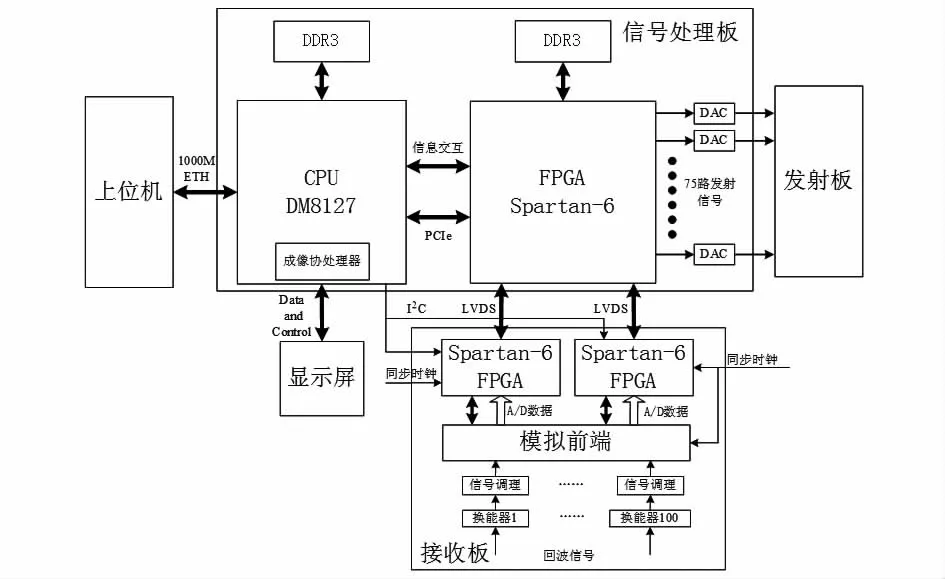
图4 系统总体框架图Fig 4 System overall frame diagram
接收板首先对从换能器接收到的微弱电信号进行调理,将信号通过一个放大电路和300~600 kHz 的带通滤波器,有效信号的衰减小于3 dB,使信号满足A/D 转换要求。然后模拟前端对声纳信号进行增益控制和同步采样,增益范围20~60 dB。采用Xilinx 公司的Spartan—6 系列FPGA完成第一级的波束形成,其内部集成大量的数字信号处理器(DSP),可高效完成波束形成运算。两片FPGA 各负责60 路信号,通过I2C 获取当前量程等参数,到处理板的数据传输通过LVDS 接口完成。AFE5851 是TI 公司推出的面向高密度低功耗设备的新型集成模拟前端,集成了16 个可变增益放大器和8 个12 位64MSPS A/D 转换器,系统的采样速率为3 MSPS,每通道功耗小于20 mW。
信号处理板的FPGA 扩展1 GB 内存,从DDR 中获取正弦波数字信号,采用查找表的方式生成75 路发射信号,最后经过D/A 转换器生成模拟信号,同时FPGA 接收经过预处理的波束信号,实现二级波束形成,通过PCIe 总线将结果传输到处理器,用于实时成像。DM8127 是基于低功耗的数字媒体处理器,拥有强大的图形处理能力和丰富的外围接口,平均功耗小于3 W,可保证系统在电池供电时保持较长的续航时间。
2.2 FPGA 设计
接收板的FPGA 主要完成模拟前端的控制、数据的采集、120 路信号的DFT 运算、一级波束形成与上传数据等功能。
由于随着阵元数量的增长,波束形成算法对硬件系统的性能要求也显著提高,在有限的成本下难以实时完成波束形成运算。为此,采用分级波束形成算法,以30 个阵元为一组子阵并行完成-60°~60°范围内31 个方向的一级波束形成,再将4 个子阵作为4 个阵元完成全阵120 个方向的二级波束形成,相比直接获取波束结果可减少90%的运算量[7]。
接收板的一级波束形成过程如图5 所示,首先对各个阵元的150 个离散采样点x1[n]做DFT 处理,并根据当前所处的频带k 提取频域信号X1(k),再参照各阵元的相移参数θ 进行相位补偿[8],最后将所有结果求和则可得到一级波束信号Rα。

图5 一级波束形成流程Fig 5 Process of level-1 beamforming
在信号处理板,信号发射模块通过DDR 控制器获取当前方向的75 路数据,将发射信号发送到D/A 转换器。FPGA 进行二级波束形成时,将每个子阵作为一个阵元,阵元的位置是子阵的中心点。在-60°~60°的范围内均分120 个方向,形成某个方向的波束时,从各个子阵元选取方向最接近的一级波束信号,经过角度差调整后与一级波束形成类似,进行相位补偿求和,最终获得以接收基阵中心为原点的120 个方向波束信息。
2.3 软件设计
系统的软件功能主要由4 个部分组成,如图6 所示。通信部分完成处理器与上位机、FPGA 和显示屏的数据传输。数据管理部分实现一些重要图像和数据的本地存储和回放。参数控制需要配置发射脉宽、探测距离档位、TVG控制等参数,同时传递人机交互的信息。
系统软件的主体是三维建模,处理器从FPGA 接收到的波束信号无法直接用于三维成像,需要先将声纳信息解析为三维坐标平面的点阵信息[9]。处理器接收到的声纳信息包括:波束信号在水平方向的角度α,信号频率k,目标点到阵元的距离D,信号强度B。数据解析过程需要将这些信息转换到以水平接收阵为x 轴,垂直阵为y 轴,垂直于换能器平面的方向为z 轴的三维坐标系(x,y,z)中。转换公式如下[10]

图6 便携式三维声纳系统软件功能Fig 6 Software function of portable 3D sonar system

其中,β 是目标在垂直方向上的角度,发射扇面的每个方向波束采用不同的频率,通过信号频带k 可以得到目标在垂直方向的角度β。由于发射波束和接收波束的方向是固定的,为提高转换效率,避免冗余的耗时运算,处理器预先计算出所有方向的正切值存入数组中,进行坐标转换时可利用查找到的正切值直接完成转换。
采用三角网格构建将分散的数据点结合成可显示的图像片段。网格构建的方式选用欧氏距离最近邻原则,首先设定一个阈值,若两点间的距离小于此阈值,则可认为这两点间有相邻关系[11]。声纳系统的探测量程是可调的,使用固定的阈值会导致不同量程下出现大量的连接错误,成像效果不理想。为此,采用动态阈值,每当量程改变时,阈值将根据该量程的最大距离进行调整[12]。
3 测试结果
为验证分级波束形成算法的可行性,利用Matlab 软件对两种算法进行仿真,设定在线阵中心0°方向有一个声波信号源且满足远场条件。仿真得到的各方向波束结果如图7和图8 所示,采用分级算法的主瓣宽度在1°左右,具有和直接算法同样高的分辨率,其旁瓣峰值的增量也小于0.5 dB,由此证明:分级波束形成算法既能够取得与直接波束形成算法相同的效果,又可以大幅度减少系统资源占用,提高运行效率。
为实际测试系统的水下成像效果,在千岛湖实验基地进行试验。图9 为10~40 m 量程下探测到的湖底地形,通过颜色和纹理的变化可以清楚地看出湖底地形状况。图10为放置了圆筒障碍物后探测到的湖底地形。

图7 直接波束形成算法仿真结果Fig 7 Simulation result of direct beamforming algorithm

图8 分级波束形成算法仿真结果Fig 8 Simulation result of multistage beamforming algorithm

图9 湖底地形成像结果Fig 9 Result of bottom of lake topography imaging

图10 湖底地形与障碍物成像结果Fig 10 Result of bottom of lake topography and obstacle imaging
英国Coda Octopus 公司开发的Echoscope Mark 系列三维声纳采用大规模的平面阵换能器进行波束信号的发射和接收,与本系统样机的技术指标对比如表1 所示。本系统样机与Mark II 相比,大幅度减少了接收阵的阵元数量,仅仅牺牲了小部分的系统性能,而离线续航时间可达3 h以上,更是将水下重量减轻到了0 kgf,总体上仍然能够满足水下精确探测和灵活作业的需求。

表1 三维声纳系统技术指标Tab 1 Technical indexes of 3D sonar system
4 结束语
本文设计并实现了一种水下便携式三维声纳实时成像系统。系统基于低功耗设计,采用优化后的分级波束形成算法高效完成声纳信号处理,通过自适应阈值的网格构建算法实现三维建模。测试结果表明:系统的水下三维实时成像效果良好,并且功耗低,重量轻,能够适应多种复杂的水下工作环境,在港口探测、堤坝巡查、小型湖泊地形绘制、河道工程等方面具有广泛的应用前景。
[1] Murino V,Trucco A.Three-dimensional image generation and processing in underwater acoustic vision[C]∥Proceedings of the IEEE,2000:1903-1948.
[2] 袁龙涛.相控阵三维摄像声纳系统信号处理关键技术研究[D].杭州:浙江大学,2013:1-8.
[3] Ferguson B G,Wyber R J.Generalized framework for real aperture,synthetic aperture,and tomographic sonar imaging[J].IEEE Journal of Oceanic Engineering,2009,34(3):225-238.
[4] Li W,Huang Xinping,Leung H.Performance evaluation of digital beamforming strategies for satellite communications[J].IEEE Transactions on Aerospace and Electronic Systems,2004,40(1):12-26.
[5] 毛 盾,刘 忠,程远国,等.基于蛙人探测声纳序列图像的水下小目标检测算法[J].传感技术学报,2011,24(7):1027-1032.
[6] Johnson J A,Karaman M,Khuri-Yakub B T.Phased subarray processing for underwater 3D acoustic imaging[C]∥MTS/IEEE OCEANS’02,IEEE,2002:2145-2151.
[7] 李长辉,陈耀武,刘清文,等.相控阵三维声纳数据离线可视化处理系统[J].计算机工程,2011,37(17):239-241.
[8] 张小平.高分辨率多波束成像声纳关键技术研究[D].哈尔滨:哈尔滨工程大学,2005.
[9] 赵 鑫.水下环境和声纳处理数据的三维可视化技术研究[D].北京:北京工业大学,2009.
[10]Khronos.OpenGL ES-The standard for embedded accelerated 3D graphics[EB/OL].[2014—03—01].http:∥www.khronos.org/opengles/2_X.
[11]张亚萍.大型三维网格模型多分辨率构建与绘制[D].杭州:浙江大学,2010.
[12]Castellani U,Fusiello A,Murino V.Statistical 3D shape analysis by local generative descriptors[J].IEEE Transaction on Pattern Analysis and Machine Intelligence,2011,33(12):25505-25510.
猜你喜欢
潍坊学院学报(2021年2期)2021-07-22
成都信息工程大学学报(2021年6期)2021-02-12
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
信号处理(2018年5期)2018-08-20
信号处理(2018年5期)2018-08-20
信号处理(2018年8期)2018-07-25
信号处理(2018年8期)2018-07-25
