
丽江站BOOTES-4综述*
2015-03-24 02:39范玉峰辛玉新白金明王传军易卫敏崔辰州CastroTiradoAlbertoJavierCunniffeRonanLaraGilOscarKubanekPetrGuziySergiy
天文研究与技术 2015年1期
范玉峰,辛玉新,白金明,王传军,易卫敏,崔辰州,Castro-Tirado Alberto Javier,Cunniffe Ronan,Lara-Gil Oscar,Kubanek Petr,Guziy Sergiy
(1. 中国科学院云南天文台,云南 昆明 650011; 2. 中国科学院大学,北京 100049;3. 中国科学院天体结构与演化重点实验室,云南 昆明 650011;4. 中国科学院国家天文台,北京 100012;5. 安达鲁西亚天体物理研究所 (IAA-CSIC),格拉纳达 18080 (西班牙);6. 马拉加大学,马拉加 29071 (西班牙);7. 物理研究所 (ASCR), 布拉格 18221 (捷克);8. 尼古拉耶夫州国立大学, 尼古拉耶夫 54030 (乌克兰)
丽江站BOOTES-4综述*
范玉峰1,2,3,辛玉新1,3,白金明1,3,王传军1,2,3,易卫敏1,2,3,崔辰州4,Castro-Tirado Alberto Javier5,6,Cunniffe Ronan5,Lara-Gil Oscar5,Kubanek Petr7,Guziy Sergiy8
(1. 中国科学院云南天文台,云南 昆明 650011; 2. 中国科学院大学,北京 100049;3. 中国科学院天体结构与演化重点实验室,云南 昆明 650011;4. 中国科学院国家天文台,北京 100012;5. 安达鲁西亚天体物理研究所 (IAA-CSIC),格拉纳达 18080 (西班牙);6. 马拉加大学,马拉加 29071 (西班牙);7. 物理研究所 (ASCR), 布拉格 18221 (捷克);8. 尼古拉耶夫州国立大学, 尼古拉耶夫 54030 (乌克兰)
伽马暴与光学暂现源观测系统 (Burst Optical Observer and Transient Exploring System, BOOTES) 旨在建设覆盖全球的多台软硬件配置相同的全自动望远镜网络,继而实现对γ射线暴和其他瞬变源的快速自动观测。BOOTES-4是该网络中的第4号站,安装在云南天文台丽江观测站。作为中国首个专业程控自主天文台,回顾了BOOTES-4的建设和安装历程,重点介绍其硬件组成和远程望远镜控制系统RTS2的技术特点和优势,最后介绍了该望远镜运行情况和观测成果。
BOOTES;RTS2;γ射线暴;程控自主天文台
随着天文技术的不断发展与进步,天文观测手段在不断丰富和完善,观测模式也正发生着日新月异的变化。在自动控制技术、计算机和信息技术发展的基础上,天文望远镜的自动观测技术取得了长足发展。根据自动观测的能力,可以把天文望远镜分为自动执行望远镜(Automated Telescope, AT)、远程操作望远镜(Remotely Operated Telescope, ROT)、程控自主天文台(Robotic Autonomous Observatory, RAO)和程控智能天文台 (Robotic Intelligent Observatory, RIO)[1-3]。
程控自主天文台是一架能够在没有任何人为协助的情况下自主适应各种变化(例如天气监测,各仪器状态监测)进行自动观测的望远镜[3]。目前,全世界已有100套以上此类自动观测系统[4],从小型望远镜到2 m口径的中型望远镜。20世纪末到21世纪初,这一成熟技术得到广泛应用,并进入程控自主天文台网络(RAON)时代。分布在地球不同地区的自动望远镜组成覆盖全球的网络,以接力方式对同一目标进行全天候观测,从而获得及时且连续的观测数据。
无人干预的自主观测和全球组网的特点,使得程控自主天文台特别适合暂现事件的捕捉和观测,以及变源的长周期监测,例如掩食、超新星爆发、γ射线暴(Gamma-Ray Burst, GRB)及其余辉观测[5]。另外,程控自主天文台在台址条件监测、科普和远程教学等领域也有较为广泛的应用。虽然我国在程控自主天文台方面起步较晚,但在国际合作的基础上已有多个项目正在建设,有些已经投入运行[3]。除了科学观测,国内在南极和西部天文选址、台站观测条件监测等应用领域积极开展相关技术研究。
伽马暴与光学暂现源观测系统[6]是程控自主天文台网络的一个典型代表,在γ 射线暴光学余辉快速响应观测等领域发挥着重要作用。第4号观测站(BOOTES-4)于2012年在我国丽江建成并投入运行。作为一台完全自动观测的望远镜系统,它具备自主识别天气状况控制圆顶开合,自主选择观测目标进行科学观测,自主保存观测数据并进行数据处理和发布等功能。本文通过对BOOTES-4系统的具体介绍,详细展示了一台全自动望远镜的建造、硬件组成和软件控制实现过程,尤其是远程望远镜控制系统软件第二版(RTS2)在BOOTES-4上的具体应用,为我国在全自动望远镜技术领域的发展提供参考和借鉴。
1 全球伽马暴与光学暂现源观测系统—BOOTES
BOOTES**http://bootes.iaa.es源于1998年由安达鲁西亚天体物理研究所(IAA-CSIC)发起的一个西班牙-捷克合作项目,用于开展γ射线暴探测和光学余辉观测研究。γ 射线暴是BOOTES的首要科学目标,其暴发持续时标短且光学余辉衰减快,这就要求望远镜有非常快的响应速度,能在接收到爆发警告后,在尽量短的时间内指向目标并开始观测。γ 射线暴空间分布和发生时间的随机性,使得在全球不同地理经度上放置多台望远镜显得非常重要。
目前,BOOTES在国际合作基础上由单一站点扩展成具有多个站点的全球网络,其中3个站配备了60 cm口径快速望远镜和测光系统。第5号站预计于2014年在墨西哥完成建设,如图1。包括计划建于南非、南美的站点,BOOTES将覆盖南、北半球和不同经度,形成一个全球观测网,使得任何时间该网中至少有一台望远镜处于黑夜中,确保能对随时出现的γ 射线暴或其它光学暂现源进行观测。

图1 BOOTES全球站点位置示意图
Fig.1 Locations of the BOOTES sites
从BOOTES-3开始,新建站点采用几乎相同的软、硬件配置。BOOTES-2于2009年将原有设备进行升级,成为BOOTES的标准节点。在能判断气象条件自动开合的圆顶内,每个标准节点安装一个60 cm快速望远镜(及小视场相机)和一个自动全天相机系统。其中,快速望远镜和相机能够在较快的时间内指向目标开始观测,并使用一组不重叠的滤光片获取光学波段辐射的能谱分布。自动全天相机系统则连续不断对夜空进行记录,用来追溯较亮的γ 射线暴光学辐射和余辉。两套科学仪器的主要性能参数见表1。对于BOOTES-4,快速望远镜被命名为BOOTES-4/MET,全天相机被命名为CASANDRA-4。
虽然γ 射线暴观测是BOOTES的主要任务,但其发生和探测率不高,适合地面小型望远镜观测的更少。除了γ 射线暴观测外,BOOTES还用于其他瞬变源和特殊天文事件的记录和观测,微引力透镜效应研究,对一些重要变源(例如AGN)进行监测等。作为程控自主天文台网络,只要天气和观测条件允许,BOOTES可以在短周期内对同一目标进行不间断观测,也可以在较长时间跨度内对目标间隔观测。除了制定和修改观测计划、检查和处理数据,所有操作能自动完成,无需人工干预。截至2012年9月,
BOOTES网络总共进行了117个γ 射线暴源的余辉观测,其中有44个发布在GCN**http://gcn.gsfc.nasa.gov快报上[7]。

表1 BOOTES新站点主要科学仪器Table 1 A list of scientific instruments at each newly built BOOTES site
2 BOOTES-4的建设过程
程控自主天文台技术与γ 射线暴研究的互相促进和发展,推动了BOOTES在广泛的国际合作基础上进行全球站点的部署和建设。2009年2月BOOTES-3在新西兰安装完成并开始工作。接下来的第4号站原计划安装在俄罗斯西伯利亚地区,但由于各种原因计划被搁置。2011年6月,在西班牙举行的第2届程控自主天文台研讨会上达成了将其在中国落户的意向,随后中国科学院云南天文台与西班牙安达鲁西亚天体物理研究所签署了在丽江天文观测站进行BOOTES建设和运行的合作协议。经双方共同努力,在半年多时间内完成了选址、运输、基础设施建设、圆顶建设、设备安装和调试,2月21日投入试运行。
一架望远镜的建设离不开很多基础性工作,包括站点勘察、电缆和光缆铺设、防雷(接地网)工程建设、基墩浇筑(图2(a))和道路疏通等。在丽江天文观测站已有的供电、互联网以及道路等设施基础上,BOOTES-4的建设相对容易,但依然需要付出很多艰辛。截至2011年11月6日,所有基建工作完成。
2011年11月2日,装载着BOOTES-4设备的集装箱抵达丽江站,安装工作开始。11月30日,圆顶安装(图2(b))以及望远镜等相关硬件设备的安装(图2(c))完成。参与望远镜及圆顶安装工作的有丽江站、国家天文台、IAA-CSIC、西班牙的圆顶承包商、德国ASTELCO望远镜公司的人员以及高美古本地村民。

图2 基墩浇筑和圆顶建设
Fig.2 Photos showing the construction of the cemented foundation pilar and the dome for the BOOTES-4
2012年2月,RTS2的软件主要开发者Petr Kubanek来到丽江站开始BOOTES-4的软件系统安装和调试工作[8],主要包括:RTS2软件系统在3台服务器上编译、安装和配置,硬件设备驱动的安装和配置,气象和观测条件阈值设置,自动调焦脚本测试及观测模式设置。最终BOOTES-4于2月21日凌晨实现初光(First Light)。3月20日BOOTES-4的落成典礼在丽江天文观测站举行,标志着国内首台专业级程控自主天文台正式投入观测。
3 BOOTES-4硬件系统
BOOTES的硬件选型是在多年运行、改进的基础上形成的,同时借鉴了同类程控自主天文台的经验。为满足快速响应的科学目标要求,系统采用全开放圆顶、超轻快速望远镜、快速相机。更重要的,作为一套无人值守的自动观测设备,整个硬件系统应能长期可靠运行,尽量减少维护需求。除了圆顶外,所有硬件均采用在天文观测和程控自主天文台领域应用广泛的成熟产品。
BOOTES-4系统包含的主要硬件设备和传感器在表2中列出,包括望远镜、相机、圆顶、视频监控、气象信息和供电等系统设备,图3展示了这些硬件设备的供电图和连接关系。

表2 BOOTES-4望远镜设备及其特点Table 2 A list of devices and components of the BOOTES-4

图3 BOOTES-4电气连接图
Fig.3 A block diagram illustrating the electric and electronic connections between devices of the BOOTES-4
4 BOOTES-4的控制系统
BOOTES-4(下文简称B4)的控制系统目前采用远程望远镜控制系统第二版(Remote Telescope System, 2nd Version, RTS2)[9]。RTS2作为成熟稳定且开源的观测控制管理软件(Observatory Manager)已应用于BOOTES全部站点和其他一些程控自主天文台项目中。RTS2系统设计的目标是实现天文台运行的完全自主化,包括望远镜的控制、天气等观测条件的监测、观测数据采集和后续处理等,并具备执行观测任务、保障正确指向、响应机会源(ToO)观测、持续跟踪、发送数据、协助科学研究等功能。
4.1 B4的控制计算机
B4的硬件设备较多,需要众多硬件接口与之连接;快速相机和全天相机每晚会产生大量的观测数据,占用可观的磁盘空间;一些实时处理进程(如WCS坐标匹配)需要很多内存和计算资源。因此,单独一台计算机或服务器难以胜任B4的全部功能。利用RTS2的模块化特点,B4的控制系统化整为零,部署在3台计算机上,分别是B4A、B4B和B4CAM,各自控制的设备和运行服务分配情况见表3。
这3台计算机以及圆顶等设备在局域网内通过TCP/IP协议实现互访。所有网络上的设备只有B4A被分配了一个因特网IP地址,各种服务均通过B4A完成,包括观测管理、数据访问、远程维护、网络监控、邮件通知等。

表3 各计算机连接的硬件设备和运行的服务Table 3 Hardware devices connected to each BOOTES-4 computer and their services
4.2 RTS2的发展和特点
RTS2的前身RTS第1版是由布拉格查尔斯大学使用Python语言和Matlab语言开发的一套集望远镜控制和数据处理于一体的远程控制望远镜系统[10-11],该系统于2000年6月完成。但是由于Python语言在实时处理和设备驱动方面的先天不足,随后决定使用C语言对其重新编写,采用PostgreSQL数据库保存和获取观测目标信息。升级后的系统即RTS2被应用到BART全自动望远镜和FRAM全自动望远镜上[12]。之后,它又被改为C++语言编写,并沿用RTS2的名称。BOOTES-4目前使用最新版的RTS2。
使用C++语言的RTS2具备面向对象编程语言的3大特点:封装、继承、多态。RTS2系统内部通过多个命名空间避免程序名称之间的冲突,这些命名空间主要有:rts2bb、rts2camd、rts2core、rts2dome、rts2filterd、rts2focused、rts2script、rts2teld、rts2sensord等。图4列出了RTS2系统内命名空间rts2core内部定义的几个很重要的类,它们分别是:rts2core∷Client(客户端类),负责客户端设备和控制端中控程序之间的通信;rts2core∷Value(数据类),定义RTS2内部使用的数据类型;rts2core∷Command(命令类),定义RTS2系统内部设备之间的命令格式。
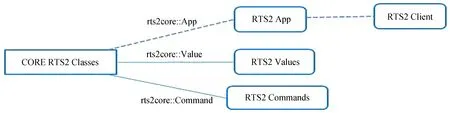
图4 RTS2系统的主要模块
Fig.4 Modules of an RTS2 system
RTS2系统有严格而清晰的类继承关系,每一个终端仪器的控制程序对应的类都继承自上一级的抽象类,层层追溯到系统的基类。以B4的Andor相机控制程序为例,RTS2的类继承关系如图5。Andor类实现对Andor相机的控制;Camera类是各种相机(Andor、SBIG、Apogee等)控制类的父类;Device类是所有设备(相机、望远镜、圆顶等)的父类;而设备类则继承自守护程序Daemon类……最终这些类都继承自RTS2的基类Object,但是这个基类中只有一个负责投递消息的函数。App类作为其子类,封装了很多成员函数(包括run函数)和成员参数,它是RTS2中百余个可执行程序的真正基类。
4.3 基于RTS2的程控自主天文台
RTS2目前已经包含150多个可执行程序,由于生成这些程序的源文件内部的类都是继承关系的,因此他们之间有很多参数可以共享。所有的RTS2可执行程序可以分为5大类[11]。

图5 RTS2系统相机程序的类继承关系
Fig.5 The inheritance from the Andor Camera Class in the RTS2
系统主控程序rts2-centrald:负责名称解析和自主天文台主控,具体查询设备设置信息,并监控天文台的状态。RTS2定义了3个状态(ON、STANDBY、OFF)以及5个时间段状态(Evening、Dusk、Night、Dawn、Morning)。ON状态表示望远镜正在进行观测;STANDBY状态下,圆顶处于关闭状态,但是其他设备均准备就绪;OFF状态主要用于检修,此时望远镜被锁定,相机停止制冷,圆顶关闭,整个系统停止工作。
设备守护程序:每个物理设备对应一个守护程序。这些守护进程使用统一规范响应指令并将设备信息注册到主控程序rts2-centrald。RTS2通过它们控制硬件设备,例如相机、赤道仪、圆顶等。
自主观测程序:负责与观测目标数据库的信息交互,挑选观测目标(rts2-selector),执行观测(rts2-executor),处理图像数据(rts2-imgproc),并随时响应GCN通过因特网推送来的警报,开启γ射线暴观测(rts2-grbd)。
系统监控程序:包括基于Ncurses**http://www.gnu.org/software/ncurses/的系统监控程序(rts2_mon),基于控制台的系统监控程序(rts2-cmon),基于X-windows的图像获取程序(rts2-xfocusc),控制台下的图像获取程序(rts2-focusc)。
数据库相关程序:观测相关数据库的查询和更新程序,有各种编辑程序(rts2-newtarget、rts2-target、
rts2-plan),模型程序(rts2-tpm、 rts2-telmodeltest)以及报告程序(rts2-targetlist、rts2-nightreport、 rts2-seltest)等。
以上5大类应用程序再加上XML-RPC协议(rts2-xmlrpcd)就构成了一个程控自主天文台节点的基本架构(图6)。
4.4 基于RTS2的程控自主天文台网络
BOOTES通过分布在全球的各站点组成观测网,实现接力式不间断观测和多站同步观测。RTS2为了实现程控自主天文台网络,设置了一个中心控制节点,命名为BB(“Big Brother”),它是观测网络中的主控单元和服务器,接收来自各(天文台)节点发送的XML-RPC消息,包括新节点接入请求、节点状态、状态更新等[13],并将相关信息记录到数据库。各节点作为客户端响应来自BB的命令,完成观测。结构如图7的例子,网络中有3个观测站节点,节点之间、节点和BB之间通过XML-RPC通信。目前,BOOTES在全球只覆盖了3个区域,其他站点仍在建设中,因此各节点尚未组网运行,仍保持独立运行模式。

图6 基于RTS2系统的程控自主天文台架构
Fig.6 The architecture of a RAO based on the RTS2

图7 基于RTS2系统实现程控自主天文台网络架构[13]
Fig.7 A configuration of a network of three RAOs based on the RTS2 (with the observatory nodes marked as A, B, and C[13], respectively)
5 BOOTES-4 的观测与运行
5.1 BOOTES的观测模式
BOOTES望远镜的大部分观测是在RTS2的目标调度机制下自动完成的,期间穿插着随机发生的γ 射线暴观测。无人值守的全自动观测正是程控自主天文台的特点。对观测的管理是观测者通过修改观测目标列表和观测模式完成的。
RTS2定义了一个广义的“观测目标(target)”,除了类型、坐标等基本信息,还包括所使用的滤光片及顺序、曝光时间、执行脚本等参数。每个目标就是一个预先定义好的观测流程片段。所有目标被保存在目标列表数据库中,通过RTS2的Selector程序挑选最合适的目标进行观测。
目标源的选择有两种调度规则(即观测模式):自动调度观测和队列观测。自动调度观测模式下,根据目标当前高度、月距、月相、观测历史等参数计算可观测目标队列里每一个目标的权值,然后按照权值由大到小依次观测。这种观测模式的优点是自主驱动,无需人工干预。它的缺点是无法提前预知哪些目标将被观测。队列观测模式下,所有的目标被排在独立的队列中,包含目标源信息和对应的观测起止时间、循环方式。特定时间段内的观测是提前计划和安排好的,可以通过模拟器预览观测计划,保证重要目标如期观测。队列同样具有优先级,其观测可被具有非常高优先级的目标(通常是γ 射线暴)中断。
γ 射线暴余辉观测是完全自动进行的。BOOTES-4向NASA注册了γ 射线暴警告的GCN网络推送服务。RTS2的GRBD服务一旦收到来自GCN网络的γ 射线暴警告触发,就会立即根据报告的位置等参数生成一个具有非常高优先级的新目标,随即中止其他观测,控制望远镜、滤光片、相机迅速进行随动观测。
除了有对应天体的目标外,还有一些特殊目标,用于晨昏天光平场、望远镜自动调焦等。这样的目标一般都包含一个专门编写的数据处理脚本,完成稍复杂的分析和控制。例如平场目标,在傍晚或清晨根据太阳高度开闭圆顶后,负责在适当时刻为不同滤光片选择合适的曝光时间获取天光平场,并通过电子邮件发送其结果。
5.2 使用BOOTES-4观测
在BOOTES望远镜上安排观测实际是定义和添加观测目标和相应的运行脚本。对需要进行长期重复观测的目标,可先进行试观测,通过远程操作,添加新目标到列表前,找出最佳观测流程和参数。在添加目标时要格外注意优先级的设定,避免因设置过高影响其他目标和设置过低而长期得不到观测的情况。
BOOTES还提供了一个网页管理服务平台(Web Interface)[14],通过它可更直观地查看设备运行状态,管理观测目标和脚本,浏览和下载观测数据等,便于不熟悉命令行操作的观测者使用和安排观测。
根据BOOTES-4的建设和运行合作协议,云南天文台拥有BOOTES-4丽江站以及BOOTES网络其他站点的一部分可观测时间。国内外研究人员可以通过合作,利用这些时间自主安排γ 射线暴以外领域的观测,并拥有这些数据的优先使用权;同时还可以开展程控自主天文台方面的技术研究。丽江天文观测站的BOOTES-4运行小组**bootes4yn@ynao.ac.cn负责安排分配观测时间,添加观测目标和制定观测脚本,转发观测数据。
5.3 BOOTES-4运行
丽江站BOOTES-4由中国科学院云南天文台依托丽江天文观测站负责具体运行和维护。观测站除提供供电和网络以外,还为日常维护、故障维修提供本地技术支持。
程控自主天文台虽然可自动执行观测任务而不依赖任何干预,但并不意味着它完全无需维护和管理。定期设备检查、光学元件清洗、排除各种外界干扰(如昆虫)等维护必不可少。B4运行过程中,还遇到过各种故障,包括圆顶传动副机械损坏、控制计算机硬件故障、系统软件问题、气象传感器元件老化、UPS电池失效等。在运行小组以及丽江站的机械、软件、电子电气、光学工程师共同努力下,这些问题均被及时解决。
为了观测数据的安全,历史观测数据还通过中国天文数据中心**http://casdc.china-vo.org/进行备份和发布,向国内外用户提供更快捷的下载。
自落成以来BOOTES-4已运行两年有余,共进行了十几个γ 射线暴余辉观测,其中有7个发布了GCN快报。有些观测显示出BOOTES的快速相应优势,例如GCN快报第15685号报告BOOTES-4在GRB140102A爆发后30 s就获得了观测数据。除γ 射线暴观测,BOOTES-4还承担了一些变源的长期光变监测,已逐渐积累了一定的观测数据。
6 总结与展望
BOOTES-4作为中国与西班牙在程控自主天文台网络的合作项目,在丽江天文观测站建成并投入运行,主要用于γ射线暴及其光学余辉的观测及变源长周期光变监测等研究。此项目的实施和不断完善不仅取得了观测数据和科学成果,还积累了建造和运行全自动望远镜的经验,形成国内在此领域的天文技术研究力量。
RTS2系统作为较为成熟而被广泛应用的程控自主天文台控制软件,已经被越来越多的天文技术人员所了解。目前国内外很多研究所或高校正在开展基于RTS2的研究和开发工作[15-16],应用到各种控制系统中。这无疑将促进我国在程控自主天文台和程控自主天文台网络领域的发展,同时提升了我国在时域天文学和天文信息学方面的研究实力。
致谢:感谢丽江天文观测站以及IAA-CSIC的工作人员和学生的长期协助和支持,特别是伦宝利、张瑞龙的帮助。感谢国家天文台的李建、曹子皇,云南天文台的金振宇、何佳佳等人在建造和运行过程提供的帮助。
[1] Castro-Tirado A J. Robotic autonomous observatories: a historical perspective[J]. Advances in Astronomy, 2010, 2010: 1-9.
[2] 赵永恒. 天文望远镜的自动观测技术[J]. 科研信息化技术与应用, 2012, 3(4): 11-16. Zhao Yongheng. Technology of automatic observation of astronomical telescope[J]. E-Science Technology & Application, 2012, 3(4): 11-16.
[3] 崔辰州, 李建, 蔡栩, 等. 程控自主天文台网络的发展[J].天文学进展, 2013, 31(2): 141-159. Cui Chenzhou, LiJian, Cai Xu, et al. Robotic autonomous observatory network review[J]. Progress in Astronomy, 2013, 31(2): 141-159.
[4] Castro-Tirado A J. Robotic astronomy and the BOOTES network of robotic telescopes[J]. Acta Polytechnica, 2010, 51(2): 1-16.
[5] 徐明, 黄永锋. 伽玛射线暴及其余辉研究进展[J]. 天文学进展, 2012, 30(1): 17-34. Xu Ming, Huang Yongfeng. Progresses in the researches of gamma-ray bursts and their afterglows[J]. Progress in Astronomy, 2012, 30(1): 17-34.
[6] Castro-Tirado A J, Jelínek M, Gorosabel J, et al. Building the BOOTES world-wide network of robotic telescopes[C]// Guziy S, Pandey S B, Tellow J C, et al. Astronomical Society of India Conference Series. 2012: 313-320.
[7] Guziy S, Castro-Tirado A J, Jelínek M, et al. GRBs followed-up by the BOOTES network[J]. European Astronomical Society Publications Series, 2013, 61: 251-254.
[8] 李建国, 范玉峰. 国内第一台专业级程控自主望远镜BOOTES-4[J]. 天文爱好者, 2012(5): 45-47.
[9] Kubánek P. RTS2-The Remote Telescope System[J]. Advances in Astronomy, 2010: 1-9.
[10]Kubánek P, Jelínek M, French J. The RTS2 protocol[C]// Proceedings of the SPIE: Advanced Software and Control for Astronomy II. 2008.
[11]Kubánek P, Jelínek M, Stanislav V, et al. RTS2: a powerful robotic observatory manager[C]// Hilton L, Alan B. Proceedings of the SPIE: Advanced Software and Control for Astronomy. 2006.
[12]Kubanek P, Jelínek M, Vitek S, et al. Status of robotics telescopes driven by RTS2(BART, BOOTES, FRAM and Watcher) [J]. Ⅱ Nuovo Cimento B, 2006, 121(12): 1501-1502.
[13]Kubánek P, Castro-Tirado A J, de Ugarte Postigo A, et al. Operating a global network of autonomous observatories[C]// Radziwill N M, Bridger A. Proceedings of the SPIE: Software and Cyberinfrastructure for Astronomy. 2010.
[14]Lasa-Gil O, Kubánek P, Castro-Tirado A J, et al. The RTS2 web interfaces[C]// Telescopes from Afar, Proceedings of the conference held 28 February-3 March, 2011 at Waikoloa Beach, Hawai′i. 2011.
[15]李建, 崔辰州, 赵永恒, 等. 基于RTS2的RAO管理系统二次开发[J]. 天文研究与技术——国家天文台台刊, 2013, 10(3): 264-272. Li Jian, Cui Chenzhou, Zhao Yongheng, et al. A secondary development of an RAO management system based on the Remote Telescope System-2ndversion[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2013, 10(3): 264-272.
[16]冉凡辉, 邓辉, 梁波, 等. 基于XML-RPC的RTS2自主观测系统远程访问技术[J]. 天文研究与技术——国家天文台台刊, 2013, 10(4): 372-377. Ran Fanhui, Deng Hui, Liang Bo, et al. A study of remote access techniques for an RTS2 Autonomous observation software system based on the XML-RPC[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2013, 10(4): 372-377.
CN 53-1189/P ISSN 1672-7673
An Overview of the BOOTES-4 at the Lijiang Observatory
Fan Yufeng1,2,3, Xin Yuxin1,3, Bai Jinming1,3, Wang Chuanjun1,2,3, Yi Weimin1,2,3,Cui Chenzhou4, Castro-Tirado Alberto Javier5,6, Cunniffe Ronan5,Lara-Gil Oscar5, Kubanek Petr7, Guziy Sergiy8
(1. Yunnan Observatories,Chinese Academy of Sciences,Kunming 650011, China, Email: fanyf@ynao.ac.cn; 2. University of Chinese Academy of Sciences, Beijing 100049, China; 3. Key Laboratory for the Structure and Evolution of Celestial Objects, Chinese Academy of Sciences, Kunming 650011, China; 4. National Observatories, Chinese Academy of Sciences, Beijing 100012, China; 5. Instituto de Astrofisica de Andalucia (IAA-CSIC), 18080 Granada, Spain;6. Unidad Asociada Departamento de Ingenieria de Sistemasy Automatica,Universidad de Malaga, 29071 Malaga, Spain; 7. Institute of Physics (ASCR), 18221 Prague, Czech Republic;8. Mykolaiv National University, 54030 Nikolaev, Ukraine)
The BOOTES (Burst Optical Observer and Transient Exploring System, http://bootes.iaa.es), is a global network of Robotic Autonomous Observatories (RAOs). It was initiated in 1998 under the leadership of Spain and the collaboration of many other countries. It is dedicated to observation of optical emissions from Gamma-Ray Bursts (GRBs) in the Universe. The fourth station of the BOOTES, BOOTES-4, is located at the Lijiang Observatory (of the Yunnan Observatories) in the southwest of China. As the first Chinese RAO the BOOTES-4 has been in full robotic operation since February 2012. It has a set of instruments identical to those of the BOOTES-2, BOOTES-3 , and upcoming BOOTES stations; these include an EMCCD camera on its 0.6m fast-slewing telescope (BOOTES-4/MET) and an all-sky camera (CASANDRA-4). In this paper we present the site construction of the BOOTES-4 and details of its hardware/software systems. The hardware systems have been built to meet the scientific requirements and the needed reliability for robotic operation. The Observatory Manager for the BOOTES-4 is the RTS2 (Remote Telescope System, 2nd version), which is an open-source software system that has been extensively used on many robotic telescopes including all BOOTES ones. We finally describe operational experiences and scientific results obtained with the BOOTES-4 since 2012. With the BOOTES-4 included, the BOOTES now has a larger sky coverage and a more significant role in designated observational tasks than before. The tasks include quick follow-up observation of GRB events, non-stop monitoring of some celestial targets, and acquisition of more precise light curves of GRBs/transient sources.
BOOTES; Robotic telescope; Gamma-Ray Bursts; Robotic Autonomous Observatory
国家自然科学基金 (11203073, 10978026, 10903028, 11303092) 资助.
2014-03-04;修定日期:2014-03-16
范玉峰,男,高级工程师. 研究方向:天文仪器与方法. Email: fanyf@ynao.ac.cn
P111.2; TP393.1
A
1672-7673(2015)01-0078-11
猜你喜欢
环球市场(2021年34期)2021-12-16
科技创新导报(2021年33期)2021-04-17
小哥白尼(趣味科学)(2021年12期)2021-03-16
检察风云(2020年15期)2020-09-26
湖北教育·科学课(2020年2期)2020-05-26
小猕猴智力画刊(2020年3期)2020-04-08
军事文摘(2020年24期)2020-02-06
电子制作(2019年19期)2019-11-23
电子制作(2018年19期)2018-11-14
电子制作(2016年1期)2016-11-07
