
“嫦娥三号”软着陆最优降落位置及能量控制研究
2015-03-20 02:06赵美中朱家明
襄阳职业技术学院学报 2015年2期
赵美中,朱家明,李 哲,汪 晓
(安徽财经大学, 安徽 蚌埠 233030)
“嫦娥三号”于2013年12月14日成功实现月面着陆,根据我国的月球探测计划,共分“绕”、“落”、“回”三个阶段。在“落”这个阶段,共需750秒,分为6个过程:主减速、快速调整、粗避障、精避障、缓速下降和自由落体。本文旨在研究如何准确定位“嫦娥三号”的下落位置以及“嫦娥三号”下降过程中燃料消耗最小。本文利用图像的二值化法对落月位置进行了准确定位并创造性地定义了燃料能耗灵敏度表达式,以此建立了耗能最低的灵敏度分析模型。(1)
一、“嫦娥三号”近月点位置确定
(一)主下降阶段动力学仿真模型[1]
1.坐标系的建立
定义参考惯性坐标系OXrYrZr:原点O位于月球中心,Zr轴由月心指向初始软着陆点,Xr轴位于环月轨道平面内且指向前进方向,Yr轴与Xr,Zr轴构成坐标系。
定义下降轨道参考坐标系Ox0y0z0:原点O位于着陆探测器质心,z0轴由月心指向着陆探测器质心为正,x0轴位于当地水平面内且指向着陆器前进方向,y0轴与x0和z0轴构成直角坐标系。两个坐标系的示意以及着陆器在坐标系中的位置,如图1所示。
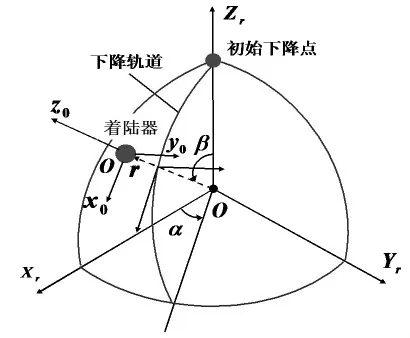
图1 软着陆坐标定义图
2.模型的构建
(1)定义推力方位角φ绕正轴z0旋转为正,推力仰角θ绕负y0轴旋转为正。分别用U,V,W表示着陆器的下降速度,在坐标系ox0y0z0三轴上的分量,即

(2)引入质量方程,可利用球坐标系与直角坐标系的关系,得到下降轨道参考坐标系下的主下阶段下落轨迹模型:
(二)近月点初始下降位置确定模型
1.着陆器位置的表示
由建立的主下降阶段动力学仿真模型,可将着陆器位置表示如下:

其中r为着陆探测器矢径;αL为着陆探测器在赤道坐标系的经向坐标;着陆探测器在赤道坐标系的纬向坐标为90-βL。
2.模型的构建
(1)建立 αL,βL的表达式:

3.结果的分析
综合以上两个模型,代入月球参数,可以得到着陆器在着陆准备轨道近月点的位置为:20.0464°W,31.9989°N,14.8 km。本文虽然只给出了近月点下落位置的确定方法,但我们可以利用主下降阶段动力学仿真模型和初始下降位置确定模型,求得着陆器在远月点的位置为:20.0464°E,31.9989°S,99.6 km。[2]
联立(2)、(3)式,求得:
赤道坐标系的经向、纬向坐标变化量为:

(2)代入经纬度表达式:
二、基于Matlab的落月点定位
经过主减速和快速调整两个阶段后,“嫦娥三号”将对落月位置进行精确定位。此时我们利用图像二值化方法对粗避障和精避障两个阶段进行分析。
(一)粗避障和精避障的三维成像
利用Matlab软件对给出的着陆探测器距离月球2 400 m和100 m时的数字高程图进行编程,所得三维成像图,如图2、图3所示。
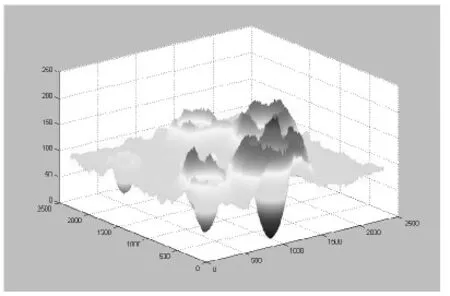
图2 距月球表面2 400 m的高程三维成像图
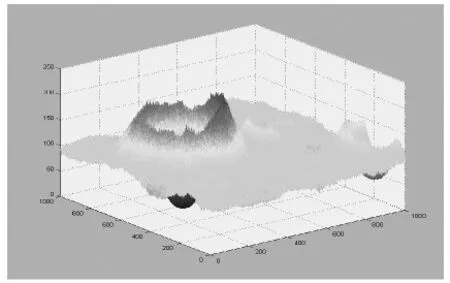
图3 距月球表面100 m的高程三维成像图
从图2中可以看到,图像中心所处地周围都被月球凸脊和凹坑所围绕,并非是最佳的着陆地点,因此如何对着陆探测器的下降位置进行调整控制就非常重要。
从图3中可以看到,距离着陆探测器下方有个比较大的凹坑,考虑到着陆探测器自身体积以及降落轨道的误差,因此着陆探测器在降落时应尽量避开此凹坑。
(二)粗避障阶段的二值化处理及准确定位
运用Matlab7软件对给出的距月球2 400 m时的数字高程图进行编程并对下落区域进行初步筛选。所得图像如图4、图5所示。

图4 处理后的2 400m高程图
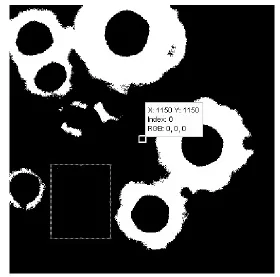
图5 2 400 m处理想落点示意图
针对图4中的每一个像素点定位一个坐标,建立一个X和Y轴均为2 400个单位的坐标系,每个像素的距离为1 m。其中白色部分的RGB值为1,1,1,表示该落月面不平滑。黑色部分的RGB值为0,0,0,表示该落月面平坦,为较优的降落位置。另外考虑到着陆探测器体积大小以及在下降过程中可能产生的轨道误差,认为降落地点应位于离着陆探测器最近且平坦面积相对较大的一片区域,如图5中蓝色边框区域所示。
结果分析:从图5中可以得到,着陆探测器此时所处的位置为(1 150,1 150),理想着落点矩形区域的中点坐标为(600,1 650),通过几何关系可得探测器距理想着陆点的直线距离为m,方向朝西南方向与X轴的夹角为42.274°。[3]
(三)精避障阶段的二值化处理及准确定位
同粗避障阶段的处理方式,利用Matlab7软件对给出的着陆探测器距离月球处时的数字高程图进行编程并对下落区域进行初步筛选。所得图像如图6、图7所示。
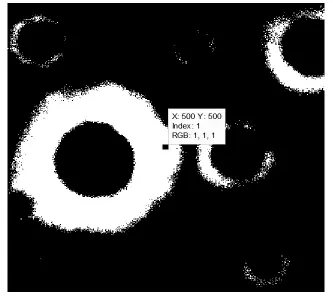
图6 处理后的100 m高程图
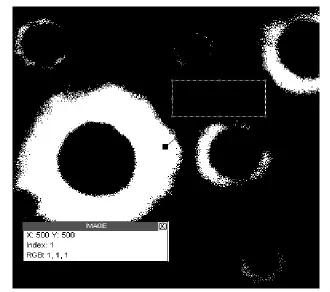
图7 理想落点区域示意图
同粗避障阶段的处理方式,针对图6中的每一个像素点定位一个坐标,建立一个X和Y轴均为1 000单位的坐标系,每个像素的距离为0.1 m。此时若假设坐标系中点(500,500)的位置即着陆探测器拍摄照片时所在的位置,如图6所示。由图6可看出,着陆探测器此时的位置位于凸脊的上方,无法进行降落,因此,综合考虑着陆探测器所在高度以及可移动的操作空间,认为距离此时着陆探测器位置最近的平坦空间即为着陆探测器的最佳降落区域,如图7所示。
结果分析:从图7中可看出,着陆探测器所处位置的坐标为(500,500),理想着陆点矩形区域的中点坐标为(650,300)。利用几何关系可求得着陆探测器所处位置与理想着陆区中心位置的直线距离为25 m,方向朝东北方向与X轴成53.13°。[4]
三、基于耗能最低的灵敏度分析模型
(一)问题的准备
积分法化分时间:将探测器软着陆时间分解为无数个极小的 Δt,取其中一段 Δt,使得任意 ε>0,均有Δt<ε。因此,在Δt时间内,探测器的质量、加速度和所受的推力均不变,且探测器的位移是一条直线。
(二)问题的求解
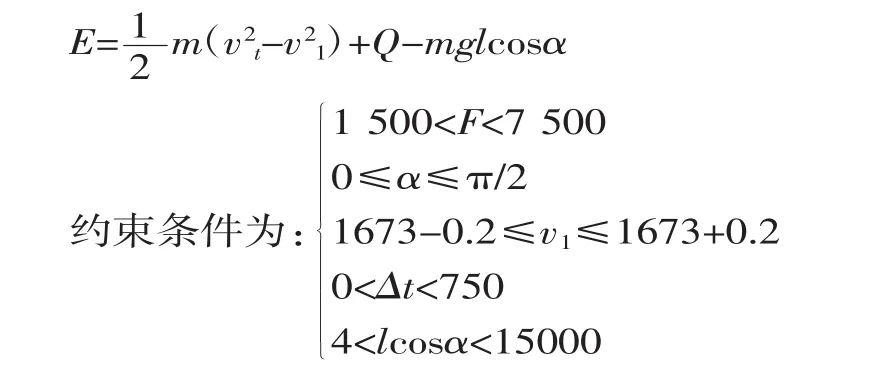
1.建立模型
要使软着陆全程燃料耗能最低,则只需使每一个Δt时间段内的燃料耗能最小即可。设在该Δt时间段内,探测器的初始速度为v1,末速度为vt,消耗的燃料能量为E,则由运动学和力学知识以及能量守恒的定理,可建立以下非线性模型:所要求的目标函数为:
2.定义燃料灵敏度表达式
在控制变量Δt、v1、α不变的条件下,增大或改变F的值对E产生的影响可通过定义燃料耗能的灵敏度,即:
上述定义式中,δ表示燃料耗能的灵敏度,ΔF表示推力F的该变量的绝对值大小,ΔE表示在改变推力的情况下燃料耗能的改变值。
(三)模型的结论
由灵敏度分析得,随推力F和探测器加速度的增大,在相同Δt内,通过的位移l也增大,因此产生更多的内能Q。由于所受月球的重力势能减少得更快,因此推力的增大会增加燃料的耗能。通过灵敏度的定义式计算可得,推力每增加一单位,燃料耗能就多增加个单位。
四、结论
本文将参考惯性坐标系、下降轨道参考坐标系两种参考坐标系相结合,使得近、远月点下降位置的确定更加准确可靠。另外还灵活借助积分的思想,将运动的全过程分解为无数个小阶段,简化了变量参数的计算,并且通过定义具体的灵敏度表达式将敏感性分析问题用定量的形式表达出来,简洁实用。文中所构建的近、远月点位置确定模型,基于Matlab7的精确定位模型以及基于燃料能耗最低的灵敏度分析模型,也适用于地球卫星和火星等星球的探测器的发射相关过程的求解,从而可以促进更好地利用环地卫星为人们服务,提高人们的生活质量,也可以为人类探索外太空提供可靠的参考思路。
注 释:
(1)2014年全国大学生数学建模竞赛A题(2014-09-22)[2014-09-12].http://www.mcm.edu.cn.
[1]蔡艳芳.月球探测器软着陆制导控制方法研究[D].西安:西北工业大学硕士论文,2006.
[2]卓金武.Matlab在数学建模中的应用[M].北京:北京航空航天大学出版社,2010.
[3]王鹏基,张熇,曲光吉.月球软着陆飞行动力学和制导控制建模与仿真[J].中国科学,2009(3):522-523.
[4]张洪华,梁俊,黄翔宇,等.“嫦娥三号”自主避障软着陆控制技术[J].中国科学,2014(6):559-561.
猜你喜欢
学与玩(2022年6期)2022-10-28
现代电力(2022年2期)2022-05-23
装备制造技术(2020年3期)2020-12-25
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
制造技术与机床(2018年12期)2018-12-23
北京航空航天大学学报(2017年4期)2017-11-23
探测与控制学报(2015年4期)2015-12-15
中学科技(2015年7期)2015-07-03
太空探索(2014年2期)2014-07-12
