
高温气冷堆PD输出反馈功率控制的镇定性能分析
2015-03-20 08:20:18黄晓津
原子能科学技术 2015年1期
董 哲,黄晓津
(清华大学 核能与新能源技术研究院,先进核能技术协同创新中心,先进反应堆工程与安全教育部重点实验室,北京 100084)
由于具有固有安全性,高温气冷堆(HTGR)已被世界核能界公认为下一代核能系统的首选堆型之一,它以氦气为冷却剂,以石墨为慢化剂和结构材料,其固有安全性能由低功率密度和瘦长型堆芯来保证[1]。清华大学核能与新能源技术研究院于20世纪70年代末开展高温气冷堆技术的研究,1995年开始了我国首座高温气冷堆HTR-10的设计和建造,并于2000年12月首次临界,2003年1 月实现满功率运行[2]。通过在满功率条件下的主氦风机停止运转等安全性实验,证明了高温气冷堆具有在任何事故工况下不采取任何人为或外围设备的干预就能实现自动停堆并维持安全状态的能力,即验证了 其 固 有 安 全 特 性[3]。此 外,2003 年1 月—2006年9月期间,HTR-10实现了超过480d的满功率运行,充分验证了球床式高温气冷堆具有良好的自稳定性[3]。在成功设计、建造和运行HTR-10的基础上,清华大学核能与新能源技术研究院在国家科技重大专项的支持下正在设计、建造球床式高温气冷堆核电站示范工程电站HTR-PM,该电站采用两套核蒸汽供应系统带动1台汽轮发电机组的多反应堆模块式核电厂技术方案[4],且每套蒸汽供应系统由1座球床式高温气冷堆和1台直通式蒸汽发生器组成。HTR-PM 的建成和运行将全面验证模块式高温气冷堆核电站的技术可行性、安全可靠性和经济竞争力[4]。
反应堆功率调节是保证高温气冷堆安全、稳定和高效运行的关键技术手段。所谓功率调节,就是通过调节控制棒棒位使核功率和堆芯出口热氦温度的暂态特性满足工程需求。功率调节对于实现高温气冷堆的安全、稳定和高效运行具有非常重要的意义。反应堆功率控制一直是核能科学与工程领域的研究热点之一,虽已有很多学者[5-8]提出了各具特色的反应堆先进功率控制方法,但在工程实践中比例积分微分(PID)控制仍占主导地位。一个很自然的问题是为何简单的PID控制就可满足工程需要。
本文拟基于反应堆控制与稳定性分析的物理方法[9-10],得到比例微分(PD)输出反馈功率控制器保证闭环全局渐近稳定的充分条件,并通过数值仿真验证该充分条件的正确性。
1 问题的提出
1.1 非线性状态空间模型
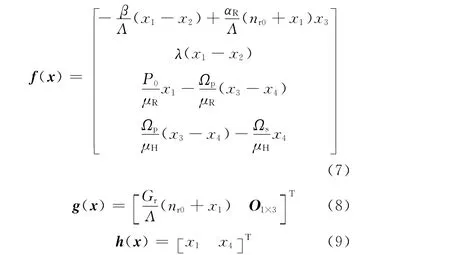
HTR-PM 电站核蒸汽供应系统结构示意图如图1所示。由图1可见,冷氦经过主氦风机加压后从底部进入反应堆,沿反射层中的管道由底至顶冷却反射层和控制棒,并进而由顶至底通过球床,通过与燃料元件换热使氦气温度大幅升高,并通过热氦导管进入蒸汽发生器一次侧,将热传递给二回路气液两相流。基于此能量转换流程可得到如图2所示的节块划分方案,并进而基于具有等效单组缓发中子的点堆模型和温度反应性反馈效应,得到如下的用于功率控制设计的动态方程:
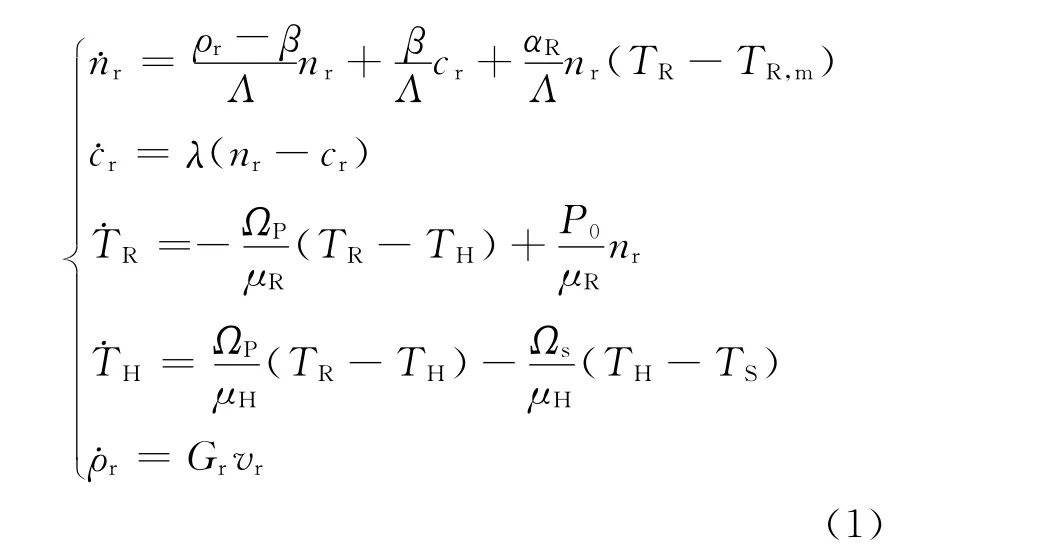
其中:nr为堆芯平均中子通量浓度;cr为缓发中子先驱核浓度;Λ 为中子代时间;λ为缓发中子先驱核衰变常量;β为缓发中子份额;TR为燃料元件和反射层的平均温度;TH为一回路氦气平均温度;TS为蒸汽发生器二次侧气液两相流的平均温度;TR,m为TR的初始稳态值;ΩP为燃料元件/反射层与氦气之间的传热系数;ΩS为蒸汽发生器一、二次侧工质间的传热系数;μR 为燃料元件和反射层的总热容量;μH 为一回路氦气的总热容量;P0为反应堆额定热功率;αR为燃料元件/反射层的反应性温度反馈系数,由反应堆物理设计保证为负值;ρr 为控制棒提供的外加反应性;Gr为控制棒的微分价值;vr为由反应堆功率控制器给出的控制棒棒速。
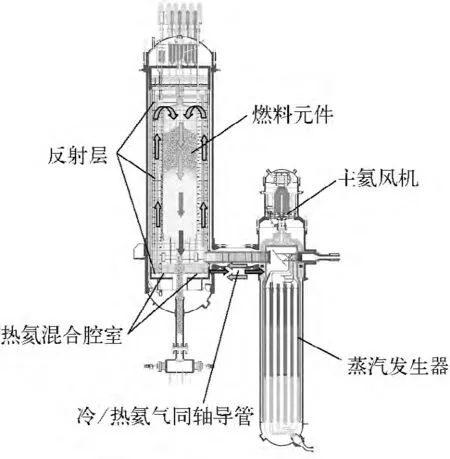
图1 HTR-PM 电站核蒸汽供应系统结构示意图Fig.1 Schematic view of nuclear steam supply systemof HTR-PM plant
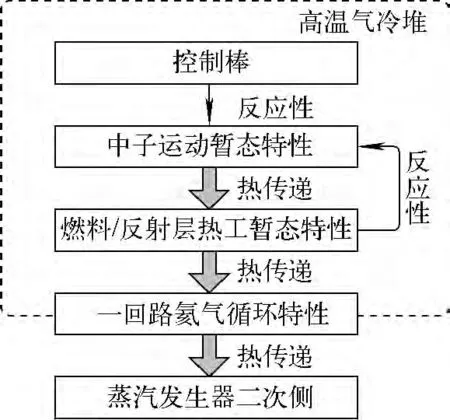
图2 高温气冷堆的节块划分方案Fig.2 Nodalization scheme of HTGR
定义nr、cr、TR、TH、TS和ρr 相对于其稳态值nr0、cr0、TR0、TH0、TS0和ρr0的变化量为:

由于δTS可由二回路蒸汽控制器良好镇定,故本文假定δTS≡0。进而,定义:
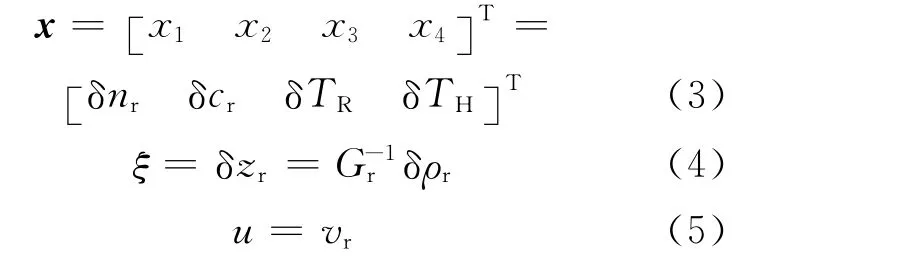
其中,δzr为控制棒的总位移。
由此可得用于分析控制器镇定性能的非线性状态空间模型为:

其中:
1.2 理论问题
目前,工程上使用的高温气冷堆采用PD控制来调节反应堆功率水平,其表达式为:

其中:kNP和kND分别为核功率反馈回路的比例和微分增益;kTP和kTD分别为热氦温度反馈回路的比例和微分增益。kNP、kND、kTP和kTD均为给定正常数。此外,由于高温气冷堆核电站的固有安全性,它不仅可用于发电、制氢和提供工艺热源,还可在负荷中心附近构建用于消纳可再生能源电力的核能微网,这就要求高温气冷堆功率控制系统具有负荷跟踪性能,而全局渐近稳定性是保证强负荷跟踪性能的基础。因此,本文需解决如下理论问题:输出反馈PD功率控制器(式(10))如何保证高温气冷堆闭环全局渐近稳定性的充分条件。
2 PD 输出反馈功率控制镇定性能的理论分析
基于反应堆控制与稳定性分析的物理方法[9-10],给出了如下保证PD 输出反馈控制器(式(10))具有全局渐近镇定性能的理论分析结论。
考察由非线性系统空间模型(式(6))和PD输出反馈控制(式(10))构成的闭环系统,当:

时,闭环系统全局渐近稳定,其中:

qT和κi(i=1,2)为任意给定的正常数,且0<εi<1(i=1,…,4)。
上述结论的分析过程如下。
首先,针对子系统:

设计虚拟控制ξr,这里ξr 可视为状态ξ 的参考值。
选择子系统(式(15))的Lyapunov函数为:
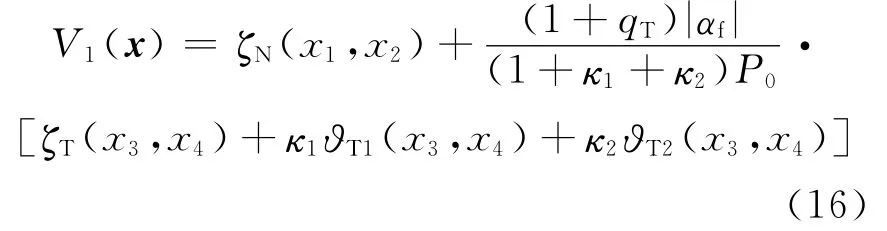
其中:ζN(x1,x2)和ζT(x3,x4)分别为反应堆中子运动环节和热工水力环节的偏对偶熵;ϑT1(x3,x4)和ϑT2(x3,x4)均为正定的辅助函数,且有:

对Lyapunov函数V1沿子系统状态空间模型(式(15))轨迹决定的方向求导可得:

由式(21)可知,若将虚拟控制ξr 设计为:则有:
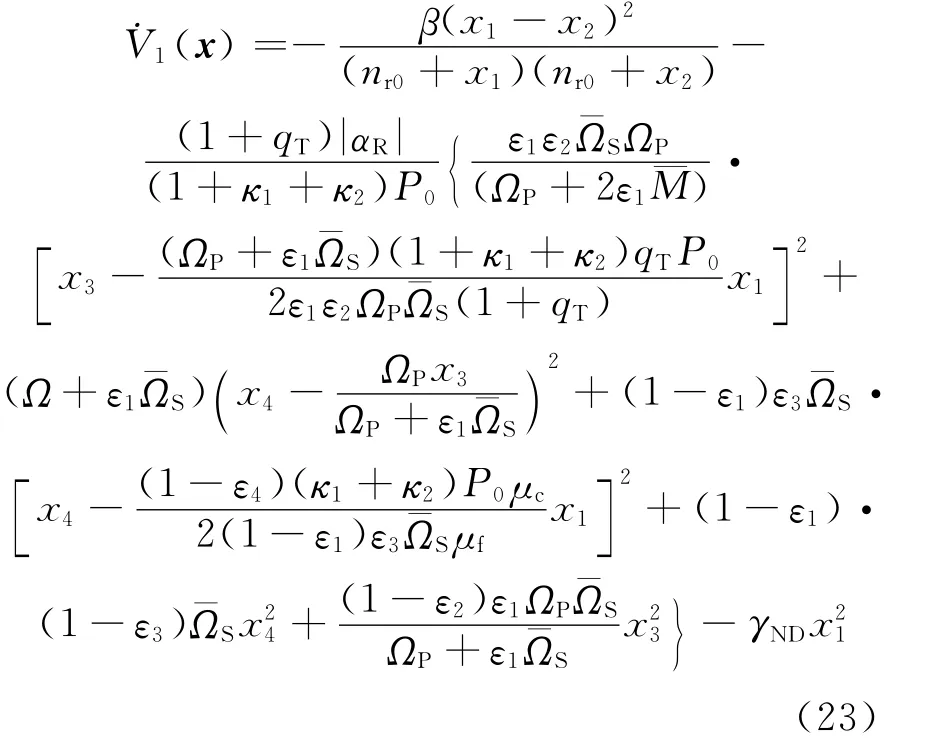

进而,由式(23)可知,由子系统(式(15))和虚拟控制(式(22))构成的闭环回路全局渐近稳定。
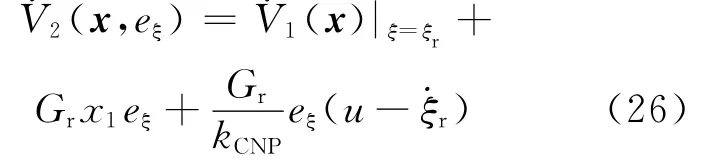
其次,针对全系统(式(6))设计控制输入u。设V1的增广Lyapunov函数为:

其中:

对V2沿非线性系统空间模型(式(6))决定的轨迹求导可得:
若设计全系统控制输入u满足以下关系:

则有:
即系统状态为:

最终收敛于集合:

进而,由模型(6)的第1个微分方程知,当系统状态z进入集合Ξ 后必然有ξ≡0,从而当t→∞时,z→O,即闭环系统全局渐近稳定。
针对上述分析结果,做如下两点说明。
1)由式(12)、(13)可知,增益kTD和kTP的值可通过合理改变参数κi(i=1,2)、qT和ε4而任意设定。此外,由式:

可知,温度反馈回路的增益比也是可任意配置的。
2)式(15)~(30)保证了只要核功率通道微分增益足够高,PD 输出反馈功率控制器即可保证闭环全局渐近稳定,这彻底解决了理论问题,并为利用形式简单的PD 控制器实现负荷跟踪奠定了理论基础。
3 PD 输出反馈功率控制镇定性能的数值仿真验证
通过将具有不同增益比χ 的PD 输出反馈功率控制器(式(10))应用于高温气冷堆核电站HTR-PM 的反应堆负荷跟踪控制,从数值上验证理论分析的正确性,并考察增益比χ 对调节性能的影响。数值仿真中的反应堆模型采用文献[11]给出的节块模型,蒸汽发生器模型采用文献[12-13]给出的分段模型,蒸汽温度采用文献[14]中的控制器,此外仿真中也考虑了文献[15]给出的泵、阀以及相关管路的动态特性。
考察反应堆由100% 满功率(RFP)以5%RFP/min的速度降至50%RFP的工况。图3为kTP=0.005而kTD不同时的相对核功率、燃料平均温度、堆芯出口热氦温度及控制棒棒速的响应曲线,图4为kTD=0.08而kTP不同时的仿真结果,其中kND=2.0且kNP=1.0。
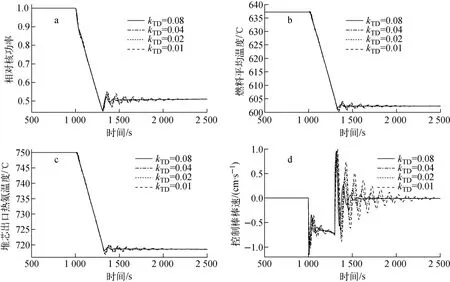
图3 相同kTP不同kTD时的仿真结果Fig.3 Simulation results in case of constant kTPand different kTD

图4 相同kTD不同kTP时的仿真结果Fig.4 Simulation results in case of constant kTDand different kTP
由图3可知,增益kTD越大,则闭环响应的振荡和收敛时间越短。由式(12)、(13)可知,若增益kTD变大而kTP不变,则必然有ε4变小,进而由式(11)知,这必然引起常数γND的增大,从而根据不等式(28),全系统Lyapunov函数V2的收敛速度增加,则必然导致闭环响应的振荡和收敛时间变小。由图4可知,若增益kTP过小,则燃料和冷却剂的温度响应均会出现稳态偏差;若增益kTP过大,则燃料和冷却剂的温度响应虽无稳态偏差,但会出现系统振荡增强和收敛时间变长。实际上,仍由式(12)、(13)可知,增益kTP变大而kTD不变,必然导致常数κ2变大的同时ε4变小。进而,由式(16)可知,κ2变大导致表征积分指标的函数ϑT2在V1中的比重增大,这将导致温度响应的稳态偏差迅速减小。同时,由式(11)可知,ε4变小导致γND减小,从而使得整个系统响应的振荡和收敛时间增加。因此,工程中在不出现饱和的情况下,应选择较大的kTD,而kTP则既不能过大也不能过小,可通过优化的方式来选择。
4 结论
功率调节对于保证高温气冷堆的安全、稳定和高效运行具有重要意义。PD 输出反馈控制律在高温气冷堆功率调节中具有广泛的应用,然而目前还没有针对这类控制律性能的理论分析。理论分析对于改进和增强现有功率控制系统的性能具有重要意义。本文从理论上给出了PD 输出反馈功率控制律保证闭环全局渐近稳定的充分条件。数值仿真结果验证了此结论的正确性,并揭示了功率调节性能与温度反馈回路增益之间的关系。该结果不仅从理论上解释了简单的PD 反馈控制律可很好地保证高温气冷堆的功率调节性能的原因,而且为利用PD 控制实现负荷跟踪提供了理论基础。
[1] LOHNERT G H.Technical design features and essential safety-related properties of the HTRmodule[J].Nuclear Engineering and Design,1990,121:259-275.
[2] WU Z,LIN D,ZHONG D.The design features of the HTR-10[J].Nuclear Engineering and Design,2002,218:25-32.
[3] HU S,LIANG X,WEI L.Commissioning and operation experience and safety experiment on HTR-10[C]∥Proceedings of 3rd International Topical Meeting on High Temperature Reactor Technology.Johanneshurg,South Africa:[s.n.],2006.
[4] ZHANG Z,WU Z,WANG D,et al.Current status and technical description of Chinese 2×250 MWth HTR-PM demonstration plant[J].Nuclear Engineering and Design,2009,239:2 265-2 274.
[5] SHTESSEL Y B.Sliding mode control of the space nuclear reactor system[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(2):579-589.
[6] HUANG Z,EDWARDS R M,LEE K Y.Fuzzyadapted recursive sliding-mode controller design for a nuclear power plant control[J].IEEE Transactions on Nuclear Science,2004,51:256-266.
[7] DONG Z.Dynamic output feedback power-level control for the MHTGR based on iterative damping assignment[J]. Energies, 2012, 5(6):1 782-1 815.
[8] DONG Z.Artificial neural network compensated output feedback power-level control for modular high temperature gas-cooled reactors[J].Energies,2014,7:1 149-1 170.
[9] DONG Z.Sufficient conditions for globally asymptotic self-stability of pressurized water reactors[J].Annals of Nuclear Energy,2014,63:387-398.
[10]DONG Z.PD power-level control design for PWRs:A physically-based approach[J].IEEE Transactions on Nuclear Science,2013,60(5):3 889-3 898.
[11]DONG Z,HUANG X,ZHANG L.A nodal dynamic model for control system design and simulation of an MHTGR core[J].Nuclear Engineering and Design,2010,240(5):1 251-1 261.
[12]LI H,HUANG X,ZHANG L.A lumped parameter dynamic model of the helical coiled oncethrough steam generator with movable boundaries[J].Nuclear Engineering and Design,2008,238:1 657-1 663.
[13]DONG Z.A Differential-algebraic model for the once-through steam generator of MHTGR-based multi-modular nuclear plants[J].Mathematical Problems in Engineering(in Press).
[14]DONG Z,HUANG X,ZHANG L.Saturated output feedback dissipation steam temperature control for the OTSG of MHTGRs[J].IEEE Transactions on Nuclear Science,2011,58(3):1 277-1 289.
[15]DONG Z.Real-time simulation platform for the design and verification of the operation strategy of the HTR-PM[C]∥Proceedings of the 21th International Conference on Nuclear Engineering.United States:The American Society of Mechanical Engineers,2013.
猜你喜欢
核科学与工程(2021年2期)2021-05-18 10:38:46
现代应用物理(2021年1期)2021-04-16 05:36:54
黑龙江电力(2017年1期)2017-05-17 04:25:05
载人航天(2016年4期)2016-12-01 06:56:15
环境科技(2016年5期)2016-11-10 02:42:12
设备管理与维修(2016年6期)2016-03-16 02:22:08
焊接(2016年1期)2016-02-27 12:54:45
核科学与工程(2015年2期)2015-09-26 11:57:01
核科学与工程(2015年2期)2015-09-26 11:56:59
核科学与工程(2015年1期)2015-09-08 13:24:35
