
基于空间RCCR 机构的轴向柱塞泵的性能参数分析
2015-03-18 02:48:58冯志鹏
郑州大学学报(工学版) 2015年6期
冯志鹏,庄 森
(郑州大学 机械工程学院,河南 郑州450001)
0 引言
斜轴泵因其启动性能好和容积效率高的特点,具有很好的应用前景,然因其受连杆强度和泵体摆角等方面的限制,约束了斜轴泵的应用[1].国内外研究者采用简化RSSCR 面杆法或者折杆法来尝试给出斜轴泵柱塞运动规律的理论公式[2-4],但均未将该规律清晰表达.解决这类问题最好可以避开这种结构的斜轴泵,采用一种新型的柱塞连接方式.近年来,庄森等人对空间RCCR机构进行了运动和力的分析[5-6],依据空间RCCR 机构的运动学原理,设想了一种斜轴泵,如图1 所示[7].然而,这种基于空间RCCR 机构的轴向柱塞泵的结构、运动规律、性能参数等方面,与其他现有斜轴泵相比具有哪些优点仍不清晰.
因此,笔者针对基于空间RCCR 机构的轴向柱塞泵的结构和运动特性,对该泵的排量以及流量脉动等性能参数进行计算,得出排量及流量脉动公式,并与现有斜轴泵进行比较,阐述该泵在结构、运动规律等方面的优点.
1 基于空间RCCR 机构的轴向柱塞泵的简单介绍
1.1 结构介绍
如图1 所示,基于空间RCCR 机构的轴向柱塞泵具有两个缸体——第一缸体和第二缸体,两个缸体的中心轴线呈一定的夹角. 配流盘上有过渡区隔开并对称分布的高低压月牙形沟槽,为排油窗和吸油窗,分别与柱塞泵的出油口和进油口相通.
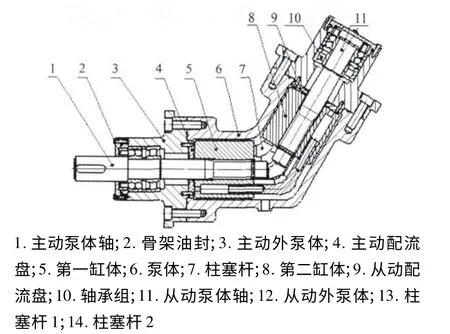
图1 基于空间RCCR 机构的轴向柱塞泵结构图Fig.1 Axial piston pump structure of the Axial Piston Pump based on the Spatial RCCR Mechanism
此外,对于第一泵体,转动轴的轴线与柱塞的轴线平行,主动轴带动第一缸体,再由第一缸体带动柱塞转动,具有斜轴泵的特点;对于第二泵体,柱塞带动第二缸体转动,再由第二缸体带动转轴转动,仍具有斜轴泵的特点.
1.2 工作原理介绍
基于空间RCCR 机构的轴向柱塞泵在工作过程中,传动轴每转动一周,每对柱塞均相对于各自与之对应的缸体同时进行一次往复运动,对应泵的一个吸入行程和一个排出行程.吸入行程:外部低压流体在大气压的作用下,经配流盘吸油窗进入柱塞腔内;排出行程:柱塞回缩,高压流体经配流盘压油窗排入系统.柱塞的往复运动,保证了向液压系统供油液,完成了轴向柱塞泵的基本要求.
1.3 运动规律介绍
空间RCCR 机构可以视为基于空间RCCR 机构的轴向柱塞泵的简化模型. 图2 为空间RCCR机构的单对杆的机构运动简图. 传力杆1、2 的位移以及速度分别为[8]:
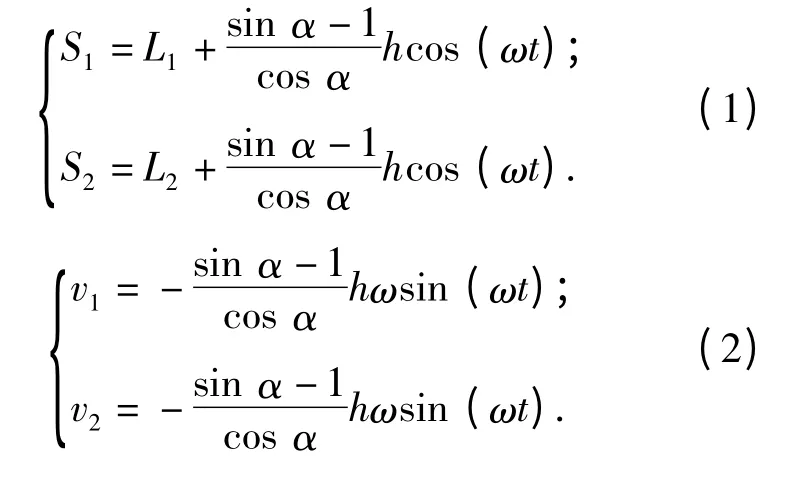
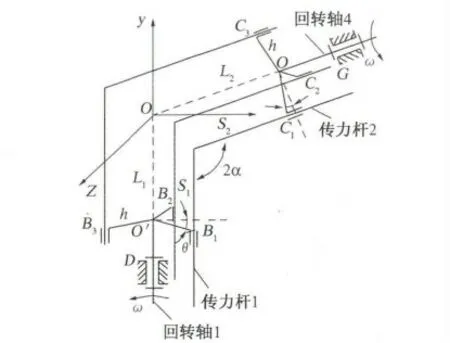
图2 空间RCCR 机构的单对杆的机构运动简图Fig.2 Kinematic schematic of RCCR space agency single rod
2 主要性能参数计算
2.1 排量
在第一泵体中,柱塞直径为d1,柱塞数Z,并定义如图2 中的结构参数L1,α,h,运动参数ω,柱塞行程l1为[9]

则泵的排量V1为

在第二泵体中,柱塞直径为d2,柱塞行程l2,柱塞数Z,并定义如图2 中的结构参数L2,α,h,运动参数ω,则泵的排量V2为

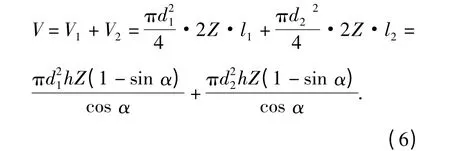
假如两个泵体均向同一系统中供油,则基于空间RCCR 机构的轴向柱塞泵的理论排量V 为
2.2 流量脉动
每个柱塞的瞬态排液量Qi为[10]
Qi=Aivi. (7)
式中:Ai为柱塞截面积;vi为柱塞瞬时相对速度.
则第一泵体中柱塞的瞬态排液量Q1为

根据上式可知,第一泵体中每一个柱塞的瞬态排液量Q1随时间遵循正弦函数变化,令θ=ωt,
Q1=A1v1=Ksin θ. (9)
由于计算处在排油区的柱塞的流量脉动,则0≤θ≤π.而在第一泵体中,每两个相邻柱塞间的夹角φ=,则第一泵体中总的瞬态排液量Qt1为

式中:m 为位于排油区的柱塞数目;n 表示第n 个柱塞.
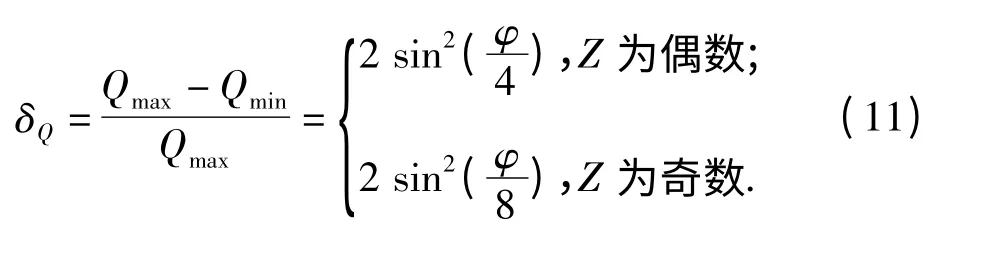

表1 不同柱塞数下的流量系数Tab.1 The flow coefficient of different plunger
3 与现有斜轴泵的比较分析
3.1 结构比较
从图1 可以看出,基于空间RCCR 机构的轴向柱塞泵具有两个泵体,每一个泵体均相当于一个无铰式斜轴泵.从结构上看,基于空间RCCR 机构的轴向柱塞泵相当于两个无铰式斜轴泵的叠加.根据上述求得的基于空间RCCR 机构的轴向柱塞泵排量公式,可以发现:基于空间RCCR 机构的轴向柱塞具有排量大的特点,因此,可以从结构上解决斜轴泵排量小的缺陷.
无铰式斜轴泵的主动轴与柱塞杆的运动轨迹均为圆形轨迹,而二者的连接点则要求椭圆运动轨迹.因此,此类泵需要一连杆作为中间件来满足传动.而经过研究,空间RCCR 机构在每对传力杆铰接处的运动副的运动轨迹如下式[5]:

上式表明,该处运动轨迹为一椭圆,满足斜轴泵的运动要求,因此,基于空间RCCR 机构的轴向柱塞泵不需要连杆作为中间件进行传动.
3.2 运动规律比较
由于无铰式斜轴泵传动轴与缸体之间的传动需要依靠连杆,其运动规律复杂,经过理论计算得到的运动方程的影响参数很多.因此,能否根据理论计算公式得到泵的运动规律示意图仍不确定[11].参考无铰式斜轴泵的motion 仿真,得到无铰式斜轴泵每个柱塞的运动规律示意图,如图3所示[12].
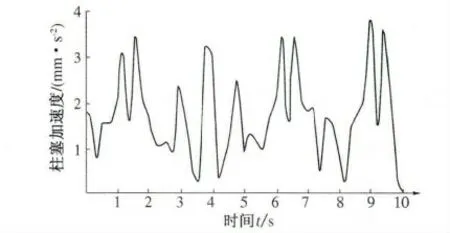
图3 无铰式斜轴泵柱塞运动规律示意图Fig.3 No knuckle oblique pump plunger motion diagram
而对比基于空间RCCR 机构的轴向柱塞泵的运动方程,发现基于空间RCCR 机构的轴向柱塞泵运动规律简单,影响参数较少. 根据基于空间RCCR 机构的轴向柱塞泵的运动方程,可以得到基于空间RCCR 机构的轴向柱塞泵每个柱塞的运动规律示意图,如图4 所示.
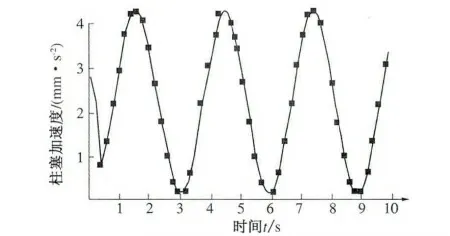
图4 基于空间RCCR 机构的轴向柱塞泵柱塞运动规律示意图Fig.4 The plunger schematic of the Axial Piston Pump based on the Spatial RCCR Mechanism
从图3、图4 可以看出,基于空间RCCR 机构的轴向柱塞泵柱塞的加速度曲线是一平滑的正弦曲线;无铰型斜轴泵柱塞速度曲线为一周期性的非平滑曲线,而正弦曲线具有容易求解及反求的优点.因此,基于空间RCCR 机构的轴向柱塞泵的运动规律优于无铰型斜轴泵.
3.3 受力状态分析
对比A2F12 型斜轴泵的工况,假定泵工况下受到的端面力如下,

式中:m 代表各传力杆1 ~7.
给定泵的工况为P =30 MPa,n =1 500 r/min.根据基于空间RCCR 机构轴向柱塞泵的结构,建立如图5 所示的空间RCCR 机构模型. 其中,两泵体夹角2α=120°,偏距h=12 mm.
对左边泵体进行受力分析,得到图6 所示的受力分析图.由文献[12]可知,传力杆在示力副处所受到的6 个约束分量,其中3 个矩分量均为零.因此,每个传力杆的示力副处仅受到3 个力分量,分别为为Fmx,Fmy,Fmz.
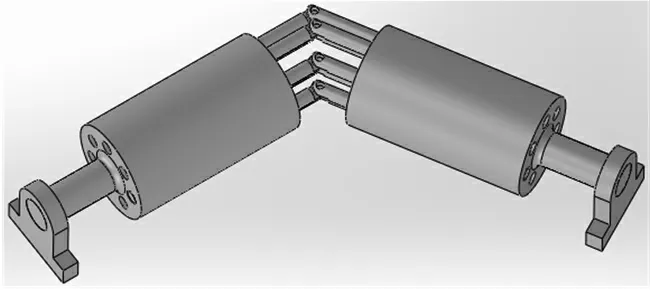
图5 空间RCCR 机构模型Fig.5 The model of SpaceRCCRagency

图6 机构拆分示意图Fig.6 Schematic diagram of the agency
根据给定压力P 与传力杆端面面积A 可得到:

根据能量守恒方程及上述变形协调方程[12]可知,此时输入力矩T1为
示力副A1~A7处的z 方向的力为
根据上述预设条件及式(17)可以得到传力杆1 示力副处的Z 向约束力,如图7 所示.
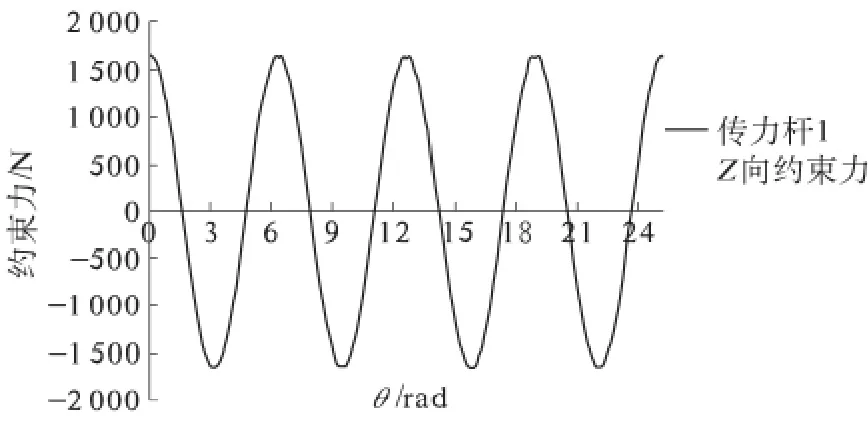
图7 Z 向约束力理论曲线Fig.7 Binding theory curve of the Z axe
由于空间RCCR 机构传力杆的受力状态相当于基于空间RCCR 机构轴向柱塞泵柱塞的受力状态.从图7 可以看出,该泵在现有斜轴泵工况下柱塞连接处的受力状态良好,随余弦规律变化.
3.4 流量脉动比较
图8 为基于空间RCCR 机构的轴向柱塞泵的柱塞数与流量脉动的关系图.从图8 可以看出:①基于空间RCCR 机构的轴向柱塞泵脉动程度随着柱塞数的增加而下降;②奇数柱塞泵的脉动程度远小于偶数柱塞泵的脉动程度,故该泵符合一般斜轴泵的流量脉动规律.

图8 基于空间RCCR 机构的轴向柱塞泵的流量脉动系数Fig.8 The flow pulsation coefficient of the Axial Piston Pump based on the Spatial RCCR Mechanism
4 结论
根据上述对基于空间RCCR 机构的轴向柱塞泵的原理及运动规律的分析,对排量、流量脉动等性能参数的计算,以及与现有无铰式斜轴泵的比较,可以得到如下结论:
(1)基于空间RCCR 机构轴向柱塞泵的排量为两个泵体的排量和;
(2)基于空间RCCR 机构轴向柱塞泵柱塞的运动规律清晰,与现有斜轴泵相比,该泵的运动规律示意图为一平滑正弦曲线;
(3)基于空间RCCR 机构轴向柱塞泵柱塞连接处的受力状态良好,接近于余弦曲线;
(4)基于空间RCCR 机构轴向柱塞泵流量脉动系数符合一般轴向柱塞泵的脉动系数的特点,间接证明了该泵应用的可能性.
[1] 许贤良.关于斜柱塞泵的问题[J]. 煤矿机械,2003(9):40 -42.
[2] BIANCHI A,BRESCIA I T. Bent axis pump:US 7739945B2[P]. 2010 -08 -22.
[3] 王奕豫,李庆. 无铰式斜轴泵新结构及初步分析[J].煤炭科学与技术,1980(1):40 -46.
[4] 宋琦,李鉴淸. 无铰型斜轴式轴向柱塞泵运动学的研究及其结构参数的选择[J]. 机械设计与研究,1984(4):54 -69.
[5] 庄森,赵伟星,蒋晶.空间相交轴RCCR 机构的位移特性[J].机械传动,2007,31(5):59 -61.
[6] 庄森,张开飞,马世榜.等偏距同转向空间RCCR 机构的位移特性[J].机械传动,2010,34(2):20 -22.
[7] 庄森,庄晨,禹茜.双杠柱塞泵:CN201110116837.9[P].2011-08-24.
[8] 庄森,程果. 双缸体轴向柱塞泵工况下的单对传力杆空间RCCR 机构受力分析[J]. 机械传动,2012,12(3):104 -106.
[9] 严金坤. 液压元件[M]. 上海:上海交通大学出版社,1989:69 -71.
[10]贾跃虎,王荣哲,安高成. 新型径向柱塞泵[M]. 北京:国防工业出版社,2012:17 -22.
[11]许贤良,赵连春,王传金. 轴向柱塞泵的流量脉动[J].中国矿业大学学报,1992,12(4):72 -81.
[12]邓海顺,张贤坤. 基于cosmos motion 的轴向柱塞泵运动仿真[J].煤矿机械,2007,28(9):60 -62.
猜你喜欢
农业工程学报(2022年10期)2022-08-22 07:34:42
机械工业标准化与质量(2022年7期)2022-08-12 02:12:38
装备制造技术(2020年3期)2020-12-25 05:22:12
工程建设与设计(2020年9期)2020-06-20 11:23:08
舰船电子工程(2019年12期)2019-12-26 11:32:48
机械工程师(2018年10期)2018-10-13 02:09:32
制造业自动化(2018年9期)2018-10-11 09:15:40
电子测试(2018年11期)2018-06-26 05:56:02
橡胶工业(2018年8期)2018-02-17 15:44:18
探测与控制学报(2015年4期)2015-12-15 15:01:06
