
永磁同步电机直接转矩控制系统建模与仿真
2015-03-17 02:16黄捷音李光升董今朝谢永成
通信电源技术 2015年3期
黄捷音,李光升,董今朝,谢永成
(1.装甲兵工程学院,北京100072;2.63978部队,河南 洛阳471099)
1 直接转矩控制的基本思想
直接转矩控制的基本思路[1]是,通过转矩两点式调节器把转矩检测值与转矩给定值作滞环比较,把转矩波动限制在一定的容差范围内,容差的大小由频率调节器来控制,因此,直接转矩控制的控制效果不取决于电机的数学模型是否能够简化,而是取决于转矩的实际情况。本文根据直接转矩控制思想,以永磁同步电机为载体构成一个具有良好动、静态特性的控制系统。永磁同步电机直接转矩控制系统如图1所示。
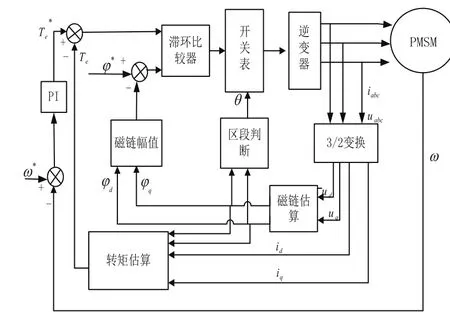
图1 永磁同步电机直接转矩控制系统框图
2 永磁同步电机数学模型
为了方便地得到定子电压、电流均为直流的永磁同步电机的电压方程式,本文对分析永磁同步电机控制过程系统的稳定性和动态性都采用在dq轴坐标系中建立永磁同步电机模型:
(1)电机在dq轴的定子磁链值[2]:

(2)电机在dq轴的电压表达式:

(3)电机的电磁转矩为:


式中,φd、φq为定子磁链d、q轴分量;Ld、Lq为定子绕组d、q轴等效电感;id、iq为定子电流d、q轴分量;ud、uq为定子电压d、q轴分量;φf为转子磁链;Rs为定子绕组电阻;p为微分算子;ωr为转子机械角速度;Te为电磁转矩;np为电机极对数;Tm为负载转矩;J为电机转动惯量;B为粘滞系数。
(4)电机的运动方程:
3 仿真分析
在Matlab/simulink中建立永磁同步电机直接转矩控制系统仿真模型,如图2所示。

图2 PMSM直接转矩控制系统仿真模型
建立电机仿真模型后,对逆变器、磁链计算、转矩计算等建立仿真模型,如图3~图6所示。

图3 电机仿真模型

图4 逆变器仿真模型

图5 磁链计算仿真模型
4 仿真结果
设置电机参数:Ld=0.641 m H,Lq=1.952 m H,R=7.5 mΩ,J=2.97×10-3,np=4,φf=0.538 Wb,Te=400 Nm,n*=2 700 r/min,P=120 kW,直流母线电压DC-BUS:750 V。设置系统初始参数给定转速ω*=45 r/s,磁链给定值φ*=1 Wb,开关频率f=5×105Hz,电机的负载转矩为阶跃信号,进行仿真,得到仿真结果如图7~图9所示。
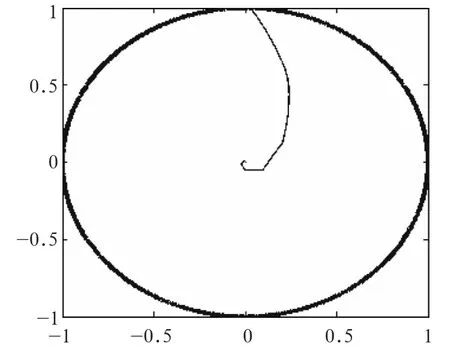
图7 磁链轨迹

图8 转矩曲线
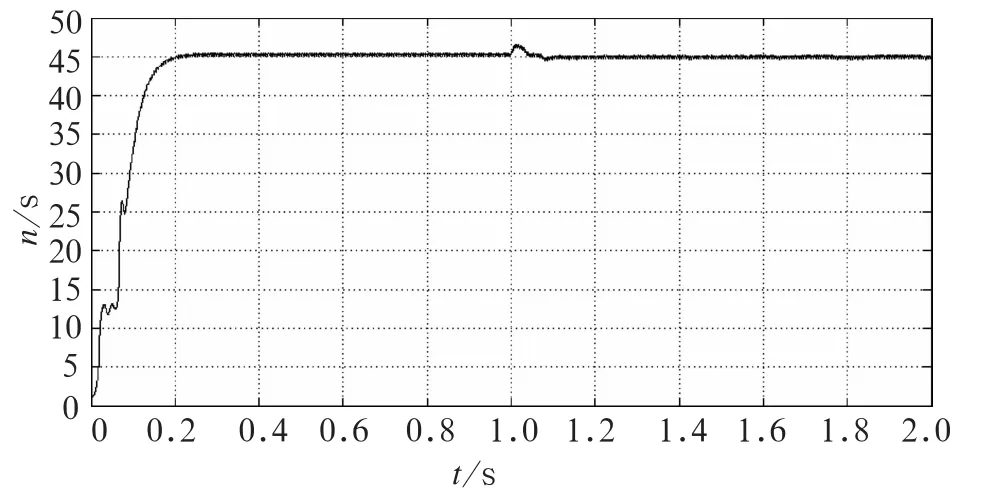
图9 转速曲线
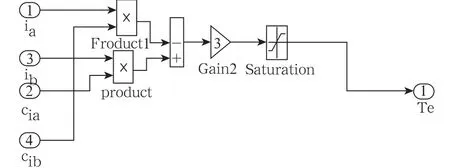
图6 转矩计算仿真模型
由图7可知,磁链轨迹收敛为圆形轨迹,图8可知,在t=1 s时转矩由400 Nm跃变为300 Nm表现出很好的跟随性。从图9可知,转速响应较快,且超调量小,在恒定转矩下启动,最后转速稳定在额定转速2 700 rad/min,当t=1 s时转矩由400 Nm跃变为300 Nm,电机转速出现一定的波动,但是最后转速依然稳定在给定转速。该控制系统的转矩响应迅速,表现出很大的抗干扰性,在此过程中磁链始终收敛成圆,负载转矩突变时,磁链已经建立起来了,达到额定之后磁链就保持在动、静上的近似恒定不变。而转矩很快地随动与负载转矩的变换,表现出了良好的动态特性和稳定性。
5 结束语
本文研究分析了永磁同步电机直接转矩控制系统在Matlab/simulink中的仿真模型,对某型电动车辆电机模型及其所需各模块模型进行仿真,通过仿真实验结果分析,验证了该方法结构简单、响应迅速、驱动状态稳定,具有一定实际意义。
[1] 韩宝林.基于DSP的直接转矩控制系统研究与实现[D].西安:电子科技大学硕士学位论文,2008.
[2] 马小亮.高性能变频调速及其控制系统[M].北京:机械工业出版社,2011.
猜你喜欢
微电机(2022年8期)2022-10-12
电机与控制应用(2022年1期)2022-09-01
防爆电机(2022年4期)2022-08-17
电机与控制应用(2022年4期)2022-06-27
防爆电机(2022年3期)2022-06-17
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年2期)2021-06-09
上海建材(2019年3期)2019-09-18
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
