
深水区海底勘察装备技术发展现状与趋势
2015-03-15 07:39魏巍马媛苏东甫
海洋开发与管理 2015年8期
魏巍,马媛,苏东甫
(1.国家海洋局南海勘察中心 广州 510300; 2.中国海洋大学环境科学与工程学院 青岛 266001;3.国家海洋局海洋咨询中心 北京 100860)
深水区海底勘察装备技术发展现状与趋势
魏巍1,2,马媛1,苏东甫3
(1.国家海洋局南海勘察中心 广州 510300; 2.中国海洋大学环境科学与工程学院 青岛 266001;3.国家海洋局海洋咨询中心 北京 100860)
深水海域的工程开发、综合管理及权益维护,需要海底勘察装备技术先行;文章从水下声学定位、动力定位、海底浅层高分辨勘察、海底取样与测试等4个方面进行了海底勘察装备技术发展现状描述,并指出了其发展趋势。
深水海域;装备技术;海底勘察
按照国际惯例,一般将水深不超过400 m的水域称为常规水深海域,400~1 500 m之间为深水海域,大于1 500 m为超深水海域[1]。深水海域空间广阔、位置重要、资源丰富,已成为世界科技创新的前沿和油气工业的热点。欧、美等发达国家已经在北海及墨西哥湾等海域开展较长时间的深水资源开发,挪威以深水高端海洋产业为核心建立国家创新体系,日本也开始积极采取行动,日本石油资源开发公司及三菱材料公司等出资设立的日本海洋掘削公司,JFE控股公司及IHI公司等出资的日本海洋联合公司(Japan Marine United Corporation)等将展开合作,共同开发用于深水海底油田及气田装备。对于我国而言,深水海域构成了我国社会经济发展的战略接替区,深水海域的勘察、研究、开发与利用,对促进我国海洋经济可持续发展、维护海上国家领土主权、保障海洋战略通道安全、提高防灾减灾能力具有重要意义。
海洋深水区域是地球表层较晚认识的部分,人类对于深水区及超深水区的知识绝大部分来自最近半个多世纪。深水海域自然环境较常规水深海域复杂,尤其深水海底静水压力大、地形变化剧烈、工程条件恶劣且多变、地质灾害多发,因此,深水海域的工业开发,需要对深水海域的海底进行全面、深入与全过程的勘察与研究。而海底勘察装备技术是海洋高技术体系的重要组成部分,是进行海洋勘察、工程开发、综合管理的重要基础,体现着国家海洋科技水平与竞争力。因此,海洋深水区域的开发战略,需要装备技术先行。
1 水下声学定位装备技术发展现状
水下声学定位技术是实现水下探测系统精确定位和海底高精度探测的基础[2],为勘察海底各类平台与装备提供高精度导航定位信息。水下声学定位系统基本采用声脉冲群定位技术(tone burst ranging techniques),通常依据激发信号的声学单元的距离划分为超短基线(<10 cm)、短基线(20~50 m)、长基线(100~6 000 m)。长基线的定位精度最高,但造价最高,短基线的精度次之,但要得到高的精度,基阵布设受到很大的限制;超短基线的精度比短基线略低,但使用方便灵活、应用广泛[3]。
现国内外市场主要水下声学定位设备来自于挪威Kongsberg Simrad公司、法国OCEANO Technologies公司(原MORS公司)、法国IXSEA公司、英国的Sonardyne公司、美国的ORE公司等。挪威Kongsberg公司产品涵盖了超短基线、短基线和长基线3种类型,其研究开发有近30 a的历史,有一系列成熟的产品投入军方及民用。法国OCEANO Technologies公司于1997年推出的POSIDONIA 6 000长程超短基线定位系统,工作水深6 000 m,最大作用距离 8 000 m,在6 000 m水深、30°开角范围内, 测距精度为0.5%斜距,询问频率为8~14 kHz,应答频率为14~18 kHz。法国IXSEA公司推出的GAPS系统是一套无需标定的便携式超高精度超短基线(USBL)系统,它将惯性导航与水下声学定位完美地结合在一起,并融入了GPS定位技术,可同时对多个水下目标(ROV、AUV、拖鱼)精确定位,并可提供高精度的姿态及航向数据,工作频率20~30 kHz,工作距离 4 000 m 内,水下定位精度为斜距的0.2%。
水下声学定位装备技术是国民经济建设和国防建设的基本技术,在海洋工程开发、海洋调查研究、海洋军事活动方面广泛应用,大大提高了海底勘察的位置精度。
2 动力定位装备技术发展现状
动力定位系统(dynamic positioning system,DPS)是一种闭环的控制系统,可不借助锚泊系统的作用,不断检测载体的实际位置与目标位置偏差,再根据外界风、浪、流等外界绕动力的影响计算出船舶恢复到目标位置的推进力,并使各推力器产生相应的推力,从而使载体保持在所需位置,一般由位置测量系统、控制系统、动力与推进系统3部分构成[4]。位置测量系统是指获得船舶相应运行参数的传感器系统,动力与推进系统负责为船舶提供足够的电力和有效的机动性,控制器根据测量船位与期望值的偏差,计算位置调整所需的推力。动力定位系统越来越广泛地应用于海上作业船舶(勘察船、半潜船等)、海上平台(浮式生产系统系泊等)、水下潜器(ROV),几乎所有深水勘察船、钻井船等都装备了动力定位系统。
第一代动力系统发源于20世纪60年代,在第一批动力定位船舶中,最成功最著名的是“格洛马挑战者”号船舶,该船几乎遍历全球海洋深水区域,采集总长度超过6 km的岩心,为海底扩张理论提供了大量坚实的证据。
第二代动力定位系统于20世纪 70 年代初开始形成,与第一代动力定位系统相比,主要特点是采用了卡尔曼滤波等现代控制技术,位置传感器则由单一型发展成声学、3自由度的综合型系统。
第三代动力定位系统于20世纪80年代初开始形成的,主要采用现代计算机技术和现场总线技术。经过多年的发展,动力定位系统的鲁棒性、灵活性、功能性和操作的简易性均提高到新的水平。其中典型的有 Kongsberg公司的SDP11系列,Navis公司的NavDP 4000系列,L3公司的 NMS 6000系列。这些动力定位系统均具有开放性的结构,能够实现船舶位置和航向的高精度保持。目前,DP系统可以在2级流、6级风的海况下实现0.35 m的位置定位精度,0.1°的艏向保持精度和1 m的航迹保持精度。
根据设备可靠性和冗余度,动力定位系统可分为3级。中国船级社(CCS)的DP船级符号为DP-1、DP-2和DP-3。动力定位系统的核心是控制技术,它标志着动力定位系统的发展水平,未来动力定位系统将进一步改进控制技术,减小或消除系统模型不精确性以及反馈系统带来的误差,并进一步进行多推力装置间的推力优化问题,不断降低造价,提高性能。
3 海底浅层高分辨勘察装备技术发展现状
由多波束测深、侧扫声呐扫描、高分辨率浅层剖面探测技术共同组成了近数十年快速发展起来的探测海底浅部结构信息的技术。它们工作原理基本相似,只是由于探测目标的不同而有所区别,使用的声波频率和强度也有差异。一般高频用于探测海底面形态,低频用于探测海底浅层剖面结构[2]。尤其以其中的多波束测深与海底浅地层高分辨率多道地震探测装备技术为代表,在海底勘察中广泛应用,提供了丰富、海量、细致的海底信息数据。
多波束测深系统是一种高效的海底地形测绘设备,可提供全覆盖的海底表层声学信息,按测深能力可划分为便携式极浅水系统(10 m以浅)、浅水多波束(10~600 m)、中水多波束(30~7 000 m)、深水多波束(100 m至全海深)。多波束测深技术萌芽于20世纪50—60年代,70—80年代迅猛发展,90年代进入商业应用,21世纪以来取得了突破性的进展;多波束测深技术是声学、电子和计算机等高科技最新成就的集成,它的发展与成熟对声学探测技术的发展具有划时代的意义。近年来,以Kongsberg公司EM122 深水多波束测深系统为代表的第四代产品已经出现,多采用多ping技术、宽带技术、近场自动聚焦和水体显示等技术,稳定性更好,工作效率更高,并发展融合侧扫声呐图像、水柱信息、底质分类数据等海底声学信息能力。图1给出了多波束测深系统的工作示意图。

图1 多波束测深系统工作示意图
海底浅地层高分辨率多道地震探测是海洋油气开发和海洋工程建设地质环境评价中最为重要的手段之一。该系统主要包括地震震源系统、地震信号接收系统及导航定位辅助系统3部分,其中,高分辨率多道地震拖缆是整个海洋工程多道地震勘探系统的核心,决定了整个系统的性能,而地震拖缆的道间距又是拖缆系统核心指标,道间距越小,横向分辨率越高,理论上,从偏移时间剖面上可分辨地下尺度大于一个CDP间距(半个道间距)的地下地质体[5]。“十一五”期间,国家海洋局第一海洋研究所联合国内优势单位研发了可用于远海深水的高分辨率多道数字地震拖缆系统,适用水深300~3 000 m、地层穿透深度300 m、6.25 m道间距、垂向分辨率优2 m的深水分辨率多道数字地震拖缆系统[6]。近年来,国外提出了深拖式多道地震探测技术[7],荷兰Geosource公司推出了1~3.125 m可定制道间距的高分辨率多道地震拖缆系统。
4 海底取样与测试装备技术发展现状
克服海水阻隔,获取海床的底质类型和海底浅表地层土的物理力学性质,地质取样(sam-pling)和原位测试(insitutest)是现今最为有效且直接的方法手段,地质取样是通过取样器取出一定深度的泥土样品,然后在室内进行专门的土工试验,以获得海底土层的土力学参数;原位测试则是将力学传感器置于一钢杆的前端,在力的驱动下,贯入海底土层中,通过测量传感器上受到土体的阻力等来直接获得土体的土力学参数[8]。
图2中所示的常规取样设备(从左至右依次为抓斗取样器、多管取样器、重力取样器和振动取样器),以其作业成本低,对船舶、绞车、海况等条件要求不高等优点,至今仍是海底勘察不可替代的专用设备。与此同时,重力活塞式保真取样器、深水岩心取样钻机、孔中取样,以及锥形触探(cone)、T形触探(T-bar)和球形触探(ball)等原位测试装备技术都已取得广泛应用。图3为2011年我国在南海3 960 m水深海域获取的海底保温保压水合物及随钻取样的样品[9]。
海底取样设备的更新与改进,可加快海洋资源勘探与海底勘察的效率和准确度,节约成本,获得良好的社会效益与经济效益。

图2 常规海底取样设备
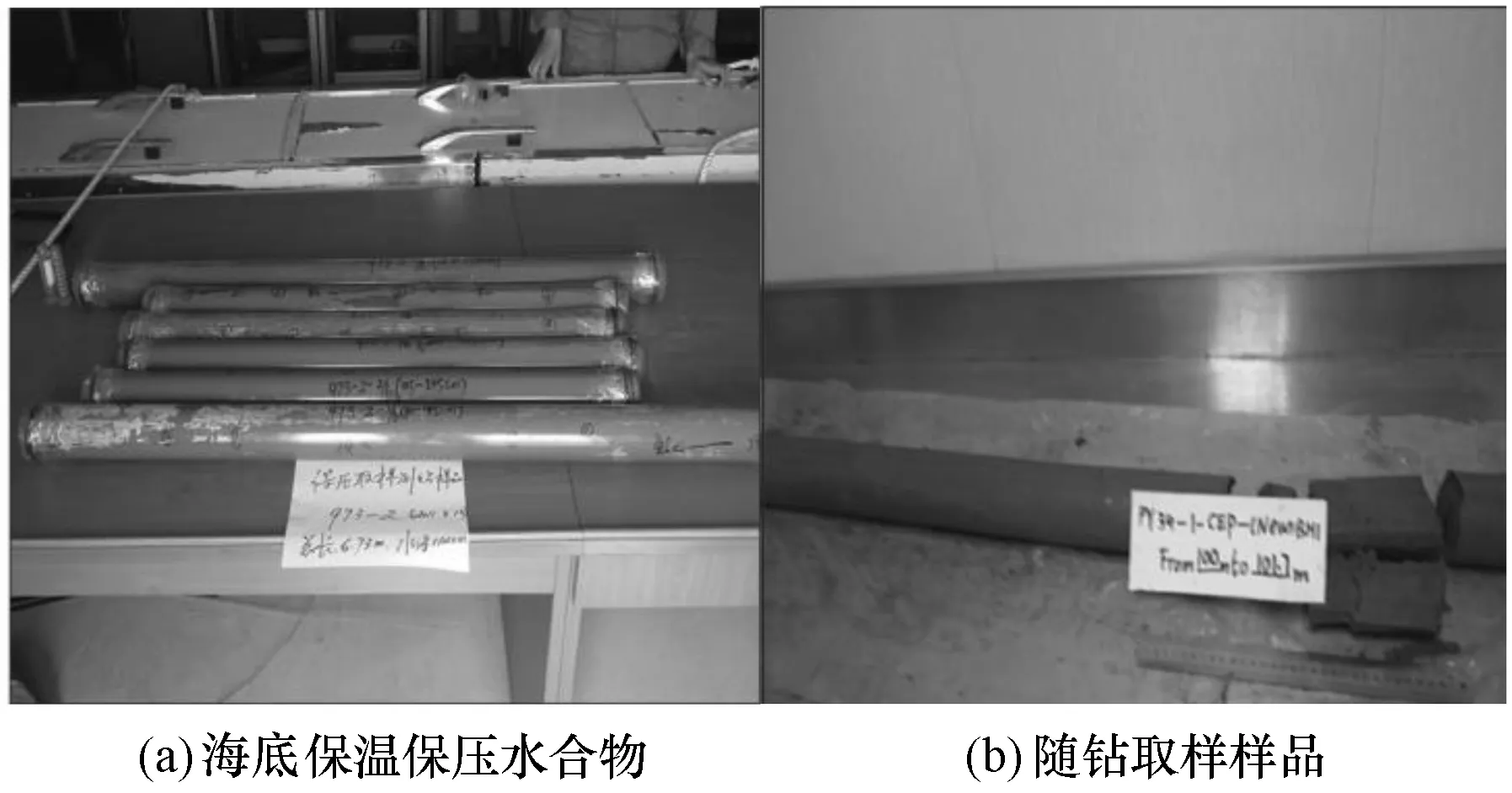
图3 海底
5 发展趋势
5.1 装备技术继续呈指数增长
深水海底勘察装备技术是高科技的舞台,不仅是一个国家开发深海资源,确保国家海洋经济可持续发展的重点,同时也是确保国家海洋安全的屏障,世界主要涉海国家都对深海的技术研发与资源的获取制订了国家发展战略层面的计划,给予政策支持;此外,该装备技术具有军民两用的特点,且相关基础工业近年来发展迅速,上述情况都为深水海底勘察装备技术快速发展奠定了基础。王云飞等[10]基于深海装备产业领域Orbit 专利数据的统计分析,发现显示了全球深海装备领域相关专利公开数量,旦其总体变化趋势,整体呈指数增长。
5.2 核心传感器呈现规模化、产业化态势
随着海底勘察装备技术研发的持续深入,成本的下降、性能和可靠性的提升,在信息技术和高端装备制造快速发展的推动下,美国、挪威、德国等先进海洋国家的海底勘察装备产业已经相当成熟,各主要核心传感器的型号众多、类型多样,涌现出近百家厂商提供各种部件及服务。而我国受制于国外技术封锁,以及集成电路技术、材料技术和高精密度机械加工制造等基础工业技术的发展水平,在核心传感器方面缺乏专利技术,处于集成创新阶段。
5.3 基础功能部件朝模块化、标准化发展
深水摄像头、深水照明灯、深水照相机、深水水密缆和深水接插件等基础功能部件朝着模块化、标准化方向发展,已经出现满足不同工作条件,并可在水下即插即用产品。但大部分此类工业化部件长期性与稳定性都较差,与国际成熟产品存在一定差距。
5.4 装备功能呈现融合、集成化态势
随着电子信息技术的发展,不同海底勘察装备呈现功能融合、集成化态势。如将浅地层剖面仪、多波束系统、摄像系统等组成深海拖体,对海底进行勘察;再如,国际上多个小型海底观测网络(如,VENUS和MARS等)已投入运行,同时,一些大型的海底观测网络计划(如,NEPTUNE、OOI、ESONET等)也正在紧锣密鼓地实施应用中[11]。
[1] 王文立.深水和超深水区油气勘探难点技术及发展趋势[J]. 勘探技术,2010(4):71-75.
[2] 金翔龙. 海洋地球物理研究与海底探测声学技术的发展[J]. 地球物理学进展,2007,22(4):1243-1249.
[3] 吴永亭,周兴华,杨龙. 水下声学定位系统及其应用[J]. 海洋测绘,2007,23(4):18-21.
[4] LOUGH A. Dynamic positioning[M]. Lioyd’s Register Technical Association, 1985.
[5] 何汉漪. 海上高分辨率地震技术及其应用[M]. 北京:地质出版社,2001.
[6] 裴彦良,刘保华,连艳红,等. 海洋高分辨率多道数字地震拖缆技术研究与应用[J].地球物理学进展,2013,28(6):3280-3286.
[7] 孔繁达,何涛,SPENCE G D.深拖曳多道地震系统在北Cascadia边缘陆坡天然气水合物勘探中的应用[J].中国科学:地球科学,2012,42(3):331-342.
[8] 薄玉宝,陈敏娟. 深水海洋工程地质勘察船技术综述[J]. 海洋石油,2013,33(3):90-96.
[9] 王明田. 深水工程地质勘察船及配套装备的研制[J]. 中国海上油气,2014,26(S1):25-30.
[10] 王云飞,谭思明,赵霞,等. 深海装备产业全球创新资源分布研究:基于Orbit 专利平台[J]. 情报杂志,2013,32(12):93-97.
[11] 朱心科,金翔龙,陶春辉, 等. 海洋探测技术与装备发展探讨[J]. 机器人,2013,35(3):376-384.
P751
A
1005-9857(2015)08-0012-04
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
家庭影院技术(2020年6期)2020-07-27
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
当代陕西(2019年8期)2019-05-09
家庭影院技术(2019年1期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年10期)2018-11-02
能源(2016年11期)2016-05-17
中国卫生(2015年1期)2015-11-16
