轻小型磁动力机器鱼机械设计与致动机理研究
2015-03-14 06:48曹致荣沃增亚
机电信息 2015年15期
曹致荣 沃增亚 黄 朋 颜 钦
(苏州科技学院,江苏 苏州215009)
0 引言
鱼类是地球上最早的脊椎动物,在大自然已经进化了至少5亿年,其外形构造以及运动原理非常适合水下生活。鱼类在水中主要靠体干波动以及鱼鳍的规律性非定常运动实现各种运动,包括启动、巡游、转向、加减速以及沉浮等动作。
鱼类的游动具有以下特点:
(1)运动效率高,阻力小。
(2)机动性高。鱼类具有很好的启动、加速、转向、制动、悬停、上升下潜等机动能力。
(3)噪声小、对环境的扰动小。鱼类的身体和尾鳍波状运动推进的噪声和对环境的扰动远远小于螺旋桨驱动的水下航行器。
因此,仿照鱼类的外形以及游动机理,制造出仿生机器鱼系统使之具有高效、灵活的水下巡游能力,可以应用于复杂环境下资源探测、生物研究和军事侦察等领域。
目前仿生机器鱼研究是国内外水下机器人研究的热点,大部分都采用电机驱动的模式,也有一些研究机构采用形状记忆合金、压电陶瓷等智能材料作为驱动元件。如:美国MIT研制的RoboTuna和后续的仿鱼推进器[1],日本运输省船舶技术研究所研制的PF系列机器鱼,英国Essex大学研制的仿生机器鲤鱼[2]以及美国西北大学研制的波动鳍推进器[3]等。国内的仿生机器鱼主要有中科院北京自动化所的机器鱼和仿生海豚[4]、北京航空航天大学的SPC系列潜水器[5]和哈尔滨工业大学的形状记忆合金仿生机器鱼[6]以及中国科学技术大学的仿生机器鱼[7-8]和形状记忆合金仿生鱼鳍[9]。
以上提及的电机关节级连或人工肌肉驱动的仿生机器鱼,主要存在体积冗余、难于防水、控制复杂等问题,特别是电机旋转驱动机构的防水问题,给仿生机器鱼的应用带来很大的制约。针对以上问题,本文提出一种新型的采用磁动力驱动的仿生机器鱼推进机构,能耗低,不需要考虑驱动机构的防水问题,而且控制方便简单,续航能力得到了极大的提升。
1 磁动力仿生机器鱼机械设计
磁动力仿生机器鱼主要包括能够调整重心的鱼身和利用磁动力驱动提供推力的鱼尾两大部分,如图1所示。鱼身部分包括系统控制模块和重心调整机构,鱼尾部分包括磁动力摆动机构和柔性尾鳍。
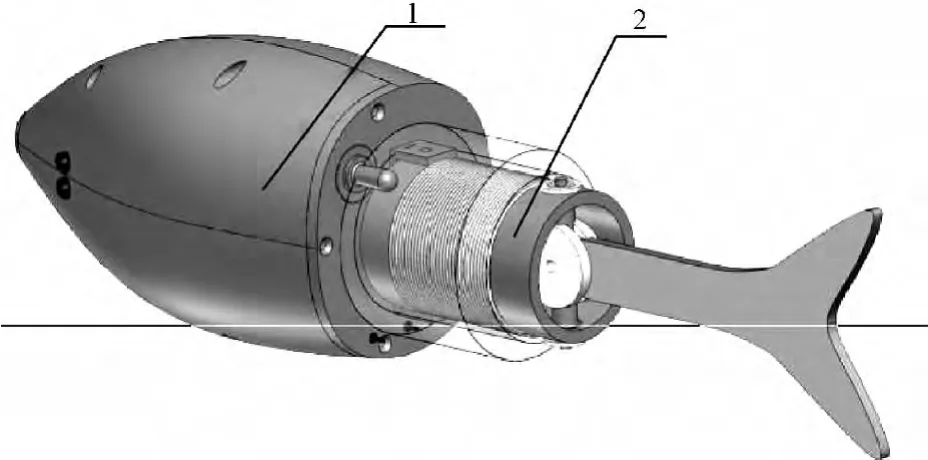
图1 磁动力仿生机器鱼机械设计
1.1 鱼身部分
鱼身是一个密闭的壳体,采用分体设计,两个分体通过螺纹连接,各缝隙处均适用密封胶进行密封。该设计不仅方便拆卸,又具有较好的防水性能。鱼身的材料采用PVC,在保证一定强度的前提下减少机器鱼的重量。鱼身的外形仿照真实鱼类,采用曲面建模完成流线型的设计,使其拥有较好的流体力学性能,宽50mm,长80mm,左右鱼眼及鱼嘴部分各留一个红外测距传感器安装孔。设计中首先通过SolidWorks软件绘制鱼身的3D模型,并通过该软件计算出鱼身内体积大小,计算出所受最大浮力。估算出受到的浮力后,还需要调整配重块重量使整个机器鱼重量与所受浮力大致相当,使静止的机器鱼能在水中悬浮。设计完成后,鱼身采用激光快速成型技术加工而成。
系统控制模块包括中央处理器、信息采集系统和驱动系统。系统控制模块的所有系统都集成在一块电路板上,与重心调整机构平行放置。电源采用两节2 400mAh锂电池,电池仓位于鱼身最下方,降低重心,提高机器鱼的稳定性。
重心调整机构是由舵机带动配重块来实现的,配重块在舵机的驱动下可以通过前后移动来调节鱼体的重心,从而改变鱼体的姿态。当配重块在前端时,鱼头朝下,鱼尾推着机器鱼下沉;当配重块在后端时,鱼头朝上,机器鱼向上浮起。配重块采用铅条进行切割,使其拥有较大的密度,力求在符合要求的前提下尽量节省空间。为了保持鱼身在水中的平衡,分别测量了电路板和重心调整机构的精确重量,并确定了两者在鱼身中的相对位置。
另外,鱼身部分还包含一些配件,如红外传感器探头、防水开关、充电桩等。红外传感器探头用来检测障碍,通过软件实现自动避障,从而达到自主巡游的目的。电源开关采用拨动式开关,拨杆外表套上了防水软塞,以防止水从缝隙中渗入鱼身中。三根充电桩用于为锂电池充电,充电时两边的两根充电桩连接电源正负极,中间则连接两节串联电池的中间结点,用于对比两节电池的实时电量并自动平衡,提高电池使用寿命。
1.2 鱼尾部分
鱼尾部分由磁动力推进机构和柔性尾鳍组成,为仿生机器鱼的动力来源,采用磁感应线圈与强磁摆子组合通过变化电流激励的方式来产生动力,如图2所示。
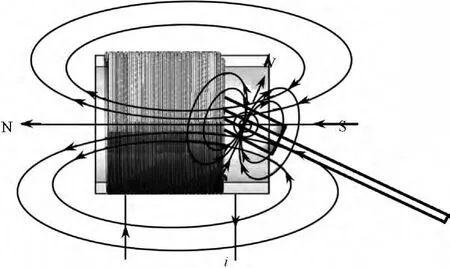
图2 仿生机器鱼鱼尾推进机构示意图
线圈采用丝径0.15mm的漆包线缠绕在有机玻璃筒管上制成。漆包线为铜丝表面进行烤漆处理,具有很好的导电性和表面绝缘性,把漆包线沿着同一方向(顺时针或逆时针)紧密地缠绕在直径为40mm的有机玻璃筒管上,即形成了中空的磁感应线圈。在线圈上接入电流即能产生磁场,如果改变电流方向,就能相应地改变线圈的磁场方向。只要交替改变电流方向,就能得到交替变化的磁场。由于筒管中心轴线上漆包线的端点处磁场最强,且沿着轴向方向,故在此位置安装强磁摆子。
强磁摆子是采用两个圆形的铷铁硼永磁体吸合安装在旋转轴的中心位置上,而旋转轴的两端则安装在两个小轴承上,旋转轴的末端通过卡销把小轴承内圈锁住,避免小轴承脱离。强磁摆子在磁感应线圈接入交变电流时,就能左右自由地往复摆动。
柔性尾鳍主要是由尾柄和鳍面组成,尾柄采用较硬的PVC薄板制成,用于传递力矩;鳍面则参照自然界中的鱼类做成新月形,并采用柔软的乳胶材料制成。连接在所述的磁动力摆动机构上,当线圈中通过向交替变化的电流时,磁动力机构就会带着柔性尾鳍左右摆动击水,产生向前游动的推进力。为防止强磁摆子在电磁力的作用下偏转角度过大,影响回摆动作,尾柄被裁剪得较长,另一端穿过强磁摆子伸入圆筒中,并且在圆筒的适当位置加入限位块,从而使鱼尾摆幅变得可控。
强磁摆子和柔性尾鳍的连接方式如图2所示,柔性尾鳍和旋转轴是由两个圆形强磁体吸合夹持在中间,同时用硅胶粘合固定,这样方便安装和拆卸。当需要更换圆形强磁体时,只要把硅胶去掉,拆开两个强磁体,便可把上下半轴取下,换上新的圆形强磁体,整体过程简单方便,易于操作。
2 磁动力仿生机器鱼致动机理
2.1 机器鱼前进机理
仿生机器鱼前进推进力的运动控制主要分成4个节拍,图3(A)为右静止状态(图中向上为右,向下为左),图3(B)为左摆驱动,图3(C)为左静止状态,图3(D)为右摆驱动。线圈的电流i方向如图3(E)控制信号图所示,当处于图3(A)状态时,线圈中不接入电流,当向左摆动时,此时线圈接入+I大小的电流,则尾鳍运动到达最左边,推进机构处于图3(C)的左静止状态,当向右摆动时,此时线圈接入-I大小的电流,则尾鳍运动到达最右边。如此反复,磁动力推进机构就能实现左右来回摆动,提供向前推进的动力,同时通过改变线圈电流i的大小和频率,就能改变摆动的快慢和幅度,从而改变推进力的大小。
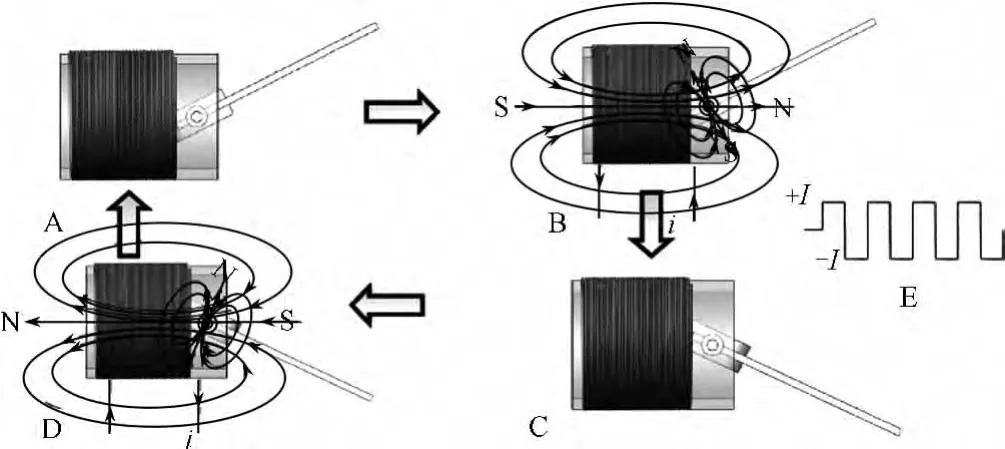
图3 机器鱼前进机理示意图
2.2 机器鱼右转机理
仿生机器鱼右转动力的运动控制同样分成4个节拍,图4(A)为右静止状态,图4(B)为左摆驱动,图4(C)为中间静止状态,图4(D)为右摆驱动。线圈的电流i方向如图4(E)控制信号图所示,当处于图4(A)状态时,此时线圈中不接入电流,当向左摆动时,此时线圈接入+I大小的电流,则尾鳍运动向左摆动到达中间位置,推进机构处于图4(C)的中间静止状态,当向右摆动时,此时线圈接入-I大小的电流,则尾鳍运动到达最右边。如此反复,磁动力推进机构就能实现在右翼区域来回摆动,提供向右转弯的动力,同时通过改变线圈电流i的大小和频率,就能改变摆动的速度和幅度,从而改变转弯角度的大小。此种情况与上述前进情况的控制信号的不同就在于前进推进时向左向右摆动的时间是一样的,而右转弯时向左摆动的时间只是向右摆动的一半,所以柔性尾鳍就只在右翼区域来回摆动,从而实现了右转弯。
2.3 机器鱼左转机理
仿生机器鱼左转动力的运动控制也是分成4个节拍,图5(A)为右静止状态,图5(B)为左摆驱动,图5(C)为中间静止状态,图5(D)为右摆驱动。此种情况与上述右转弯的情况原理相同,只是控制信号的方向恰好相反,在此不作赘述。
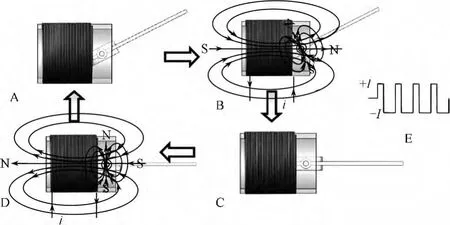
图4 机器鱼右转机理示意图
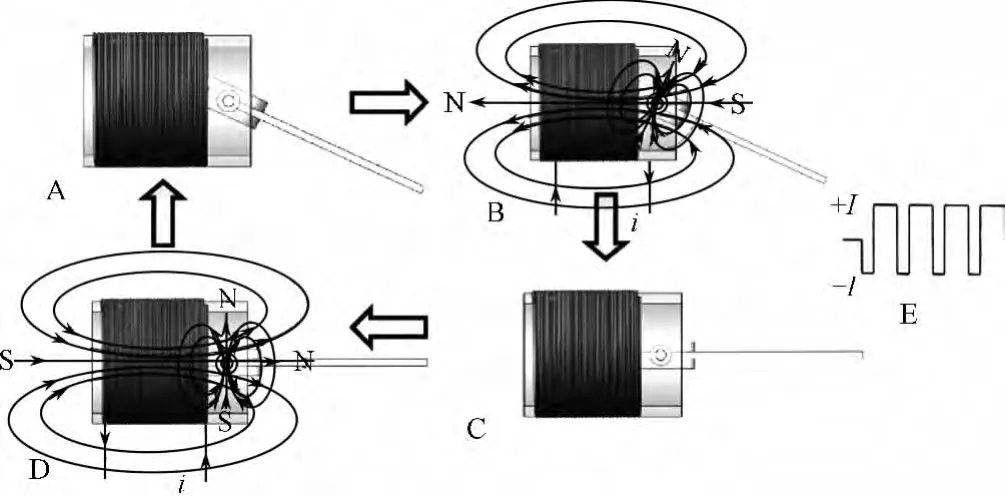
图5 机器鱼左转机理示意图
3 实验测试
磁动力仿生机器鱼样机如图6所示,具体参数详如表1所示。为了获得仿生机器鱼游动性能,我们首先测试了机器鱼的能耗,并与使用舵机作为执行机构的能耗作了对比分析,接下来对鱼尾摆动频率f对仿生机器鱼巡航速率的影响进行了研究。
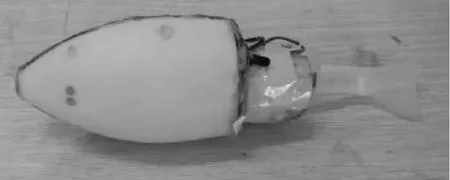
图6 磁动力仿生机器鱼样机
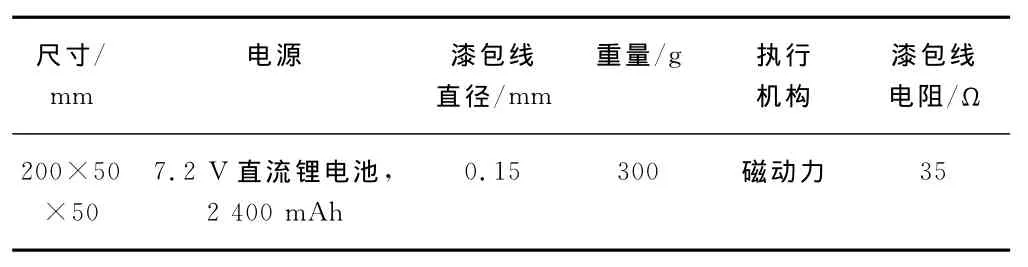
表1 仿生机器鱼的参数
实验是在充气游泳池中进行的,尺寸大约为2.5m×1.5m×0.5m。为保证所有实验能在同等条件下进行,在实验中,机器鱼的能源由稳压直流电源进行供电,而不采用装在机器内部的电池。
图7是实验用的充气游泳池。

图7 实验水池
3.1 仿生机器鱼能耗实验
在实验中,分别对舵机和磁动力推进机构在同样的环境中进行能耗测试(摆幅A=16.2mm,柔性系数K=0.48,电源电压U=7.2V,其中,柔性系数K为弹性长度占尾鳍总长度的比例)。如图8所示,可以看出两种驱动方式中电流随频率增大而增大,近似线性关系。同时,磁动力推进机构的电流接近舵机的一半,这说明磁动力的方式非常节能,能耗比舵机减少了50%。有一点需要指出的是,在实验中,舵机由于机械响应性能的限制,不可能实际达到4.8Hz和6Hz的频率,所以此时摆幅较小,电流快速增大,如图中椭圆标注。
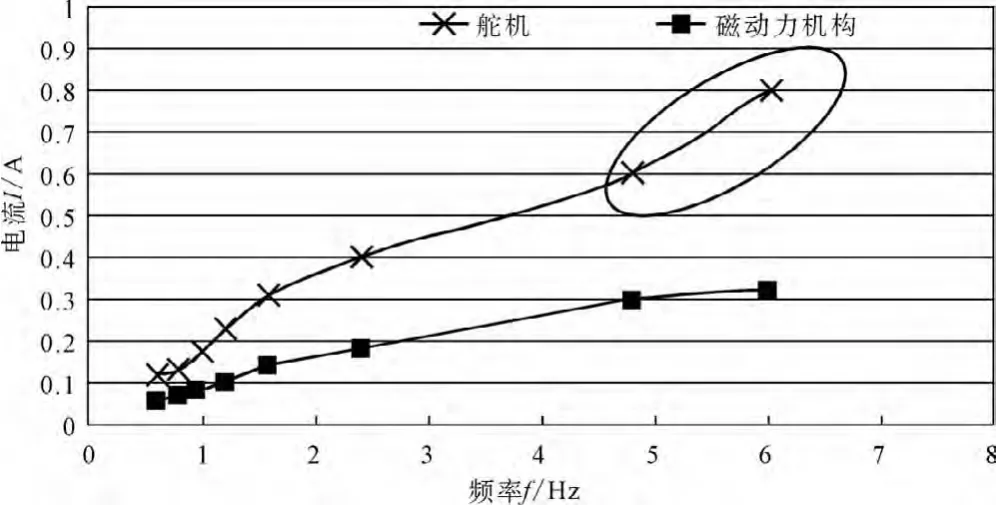
图8 舵机和磁动力推进机构的能耗比较
3.2 频率对速度的影响实验
为了考察速度和频率之间的关系,我们对仿生机器鱼在不同频率下的速度进行了测试,如图9所示,实验结果如图10所示(A1=16.2mm,A2=21.5mm,K=0.48)。从中可以看出,随着频率的增加,速度先增加然后到达一个峰值随后再减小,两条曲线变化趋势一致。这种现象是由于该推进机构存在一个速度极限,导致了尾鳍的振幅不可能达到预设的值,因此推进机构的推力在高频时会减小。在这项测试中,两条曲线相互非常吻合,都在1.6Hz的频率上取得速度最大值,为100mm/s,相当于1s半个身位的速度。
4 结语
本文设计和研制了一种新型的小型磁动力仿生机器鱼,在这个设计中,磁动力推进机构是一个亮点,简单、节能且易于小型化。文章首先介绍了磁动力仿生机器鱼的结构设计,并详细阐述了磁动力推进机构的致动机理,为了研究仿生机器鱼的运动性能,我们做了一系列实验并得出了结论:磁动力仿生机器鱼非常节能,在同等条件下比舵机驱动减少50%的能耗;仿生机器鱼在频率1.6Hz时获得较高的运动效率。在未来的工作中,我们将会采用ANSYS对磁动力推进机构进行电磁场仿真,同时,还需要做更多的实验来研究游动效率、机动性能以及上浮和下沉的性能。

图9 磁动力仿生机器鱼巡游序列图
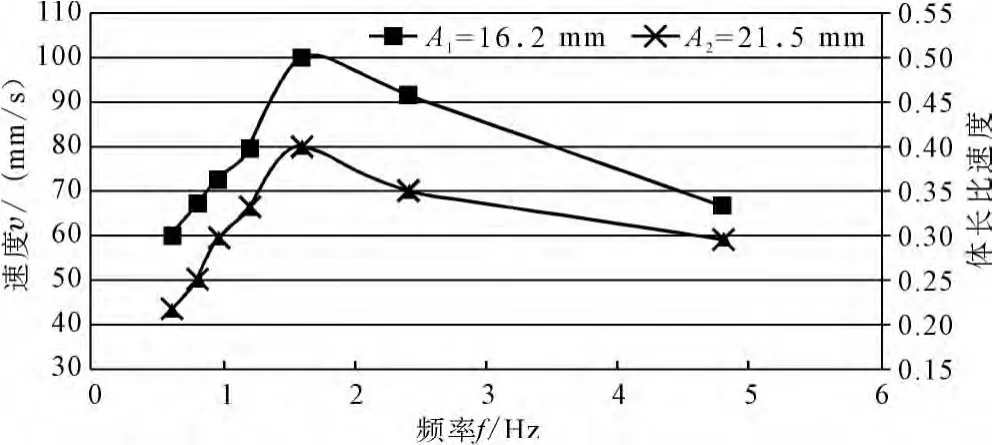
图10 速度和频率之间的关系
[1]Triantafyllou M S,Triantafyllou G S.An Efficient Swimming Machine[J].Scientific American,1995(3).
[2]Liu J,Hu H,Gu D.A Layered Control Architecture for Autonomous Robotic Fish[C]//Proceedings of IEEE/RSJ Int.Conf.on Intelligent Robots and Systems,2006.
[3]Epstein M,Colgate J E,MacIver M A.A Biologically Inspired Robotic Ribbon Fin[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems,workshop on Morphology,Control,and Passive Dynamics,2005.
[4]Yu J,Su Z,Tan M,et al.Control of Yaw and Pitch Maneuvers of a Multilink Dolphin Robot[J].IEEE Transactions of robotic,2012(4).
[5]梁建宏,邹丹,王松,等.SPC-Ⅱ机器鱼平台及其自主航行实验[J].北京航空航天大学学报,2005,31(7).
[6]杭观荣,王振龙,李健,等.基于柔性鳍单元的尾鳍推进微型机器鱼设计研究[J].机器人,2008,30(2).
[7]Yan Q,Han Z,Zhang S,et al.Parametric Research of the Experiment on a Carangiform Robotic Fish[J].Journal of Bionic Engineering,2008,5(2).
[8]韩珍,颜钦,张世武,等.基于序列图像处理法的机器鱼转向机动性能研究[J].机器人,2010,32(5).
[9]Zhang S,Liu B,Wang L,et al.Design and Implementation of a Lightweight Bio-Inspired Pectoral Fin Driven by SMA[J].IEEE/ASME Transactions on Mechatronics,2014,19(6).
猜你喜欢
散文诗世界(2022年3期)2022-03-21
南方农业学报(2020年7期)2020-11-09
自动化学报(2019年6期)2019-07-23
机械工程师(2018年1期)2018-12-29
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
微特电机(2016年8期)2016-11-26
特别健康·上半月(2016年6期)2016-10-21
舰船科学技术(2015年8期)2015-02-27
传奇故事(破茧成蝶)(2015年4期)2015-01-09