利用香农熵的双极化合成孔径雷达船只检测
2015-03-14 06:56:52龙梦启杨学志孟俊敏刘根旺张晰董张玉
遥感信息 2015年5期
龙梦启,杨学志,孟俊敏,刘根旺,张晰,董张玉
(1.合肥工业大学计算机与信息学院,合肥 230009;2.国家海洋局第一海洋研究所,山东 青岛 266061)
利用香农熵的双极化合成孔径雷达船只检测
龙梦启1,2,杨学志1,孟俊敏2,刘根旺2,张晰2,董张玉1
(1.合肥工业大学计算机与信息学院,合肥 230009;2.国家海洋局第一海洋研究所,山东 青岛 266061)
针对传统恒虚警率(CFAR)船只目标检测方法存在虚警率设置困难、算法自动性差的问题,该文结合香农熵特征对于船只目标和海面表现出不同特性的原理,即船只目标的香农熵为正值,海面的香农熵为负值,提出了一种基于香农熵的船只目标检测方法。文中利用8景C波段Radarsat-2双极化SAR数据进行检验,与K-CFAR、G0-CFAR及基于反射对称性的XC船只目标检测算法进行对比分析,结果表明本文提出的方法具有较好的检测性能。
双极化;合成孔径雷达;香农熵;船只目标;目标检测
0 引 言
合成孔径雷达(SAR)具有全天时、全天候成像等诸多优势,已广泛应用于海上交通运输、海上贸易、海岸和渔业监测、船舶污染、溢油检测和海上执法等领域。SAR图像船只目标检测已经成为海洋领域研究的重要内容之一[1-2]。
随着极化SAR技术的发展,SAR船只目标检测方法由传统的单极化检测发展到极化SAR检测。由于极化SAR数据能够提供更加完整的信息描述目标的散射特性,因此利用极化SAR图像开展船只目标检测具有更大优势,能够提高船只目标的检测性能[3-5]。特别地,双极化数据能够提供两倍于全极化的测绘宽度,更适于开展业务化应用,因此具有广泛的应用前景。
传统的船只目标检测方法主要是基于单极化SAR数据的恒虚警率(CFAR)方法[6]。CFAR方法的关键在于两方面:①建立SAR统计分布模型,常见的分布模型有K分布、瑞利分布、对数正态分布、G0分布、伽马分布、广义伽马分布和Alpha稳态分布等[7-10],一般通过直方图拟合的方法选择合适的分布模型;②设置虚警概率,当前虚警概率并没有统一的设置标准,主要是根据经验进行设置,当虚警概率设置较大时,结果将会出现较多虚警目标,当虚警概率设置较小时,结果将会出现部分漏检目标。由此可见,基于CFAR的船只目标检测算法存在较多的人工干预而降低了算法的自动性。
研究表明通过选取合适的极化参数,利用简单的阈值分割方法检测海面上的船只目标,能够有效地解决传统CFAR算法自动性差、计算量大的问题。文献[11-12]通过分析船只等海上目标与海面的反射对称性,得出海面的同极化与交叉极化通道的散射幅度之间相关性的模(XC)近似为0,而船只等海上金属目标的XC大于0,基于该原理提出利用XC的阈值分割实现船只目标检测。然而该方法未能充分利用极化信息,在检测结果上可能出现虚警或漏检。
基于以上分析,针对当前船只目标检测方法的不足,本文通过分析双极化香农熵特征[13]在船只与海面上表现的不同性质,利用大量实验证实了船只目标的香农熵明显都为正值,海面的香农熵明显都为负值,并基于香农熵特征的阈值分割,提出了一种基于香农熵的双极化SAR船只目标检测方法。由于极化香农熵特征利用了全部极化通道信息,相比XC特征具有较丰富的极化信息,因此本文提出的方法具有提高检测性能的优势。文中分别利用本文算法、XC算法和传统CFAR算法对Radarsat-2双极化SAR数据进行测试,通过船舶自动识别系统(Automatic Identification System,AIS)报告提供的地面实况信息对船只目标的检测结果进行验证。
1 双极化SAR数据的香农熵
1.1 香农熵定义
根据极化SAR相关理论,全极化SAR图像中每一个像素的三维极化复矢量k服从均值为0的三维圆形高斯过程[13-14]:
(1)
(2)

(3)
在双极化条件下,极化相干矩阵将退化为2×2的厄尔米特半正定矩阵T2,其特征值与特征向量的个数分别为2。由于极化相干矩阵可相似对角化为极化协方差矩阵C2,则香农熵SE的表达式退化为:
(4)
1.2 香农熵对船/海响应的分析
由香农熵的表达式(见式(3)、式(4))可知,香农熵只与平均极化协方差矩阵(相干矩阵)的行列式有关,而与其他参数无关。由于极化协方差矩阵的行列式是利用各极化通道得到的,因此香农熵特征包含较丰富的极化信息。由极化散射理论可知,船只目标为强散射目标,其极化协方差矩阵(相干矩阵)的值较大,海面为弱散射目标,其极化协方差矩阵(相干矩阵)的值较小。可以得出:船只目标的平均极化协方差矩阵的行列式要远大于海面的。那么,通过平均极化协方差矩阵(相干矩阵)的行列式乘以适当的参数(πe)p(双极化下p=2,全极化下p=3(满足互易性条件))再取log对数构造极化香农熵特征,能够有效地实现船海目标的分离。下面利用真实的SAR数据分析香农熵特征对船海的响应特性。
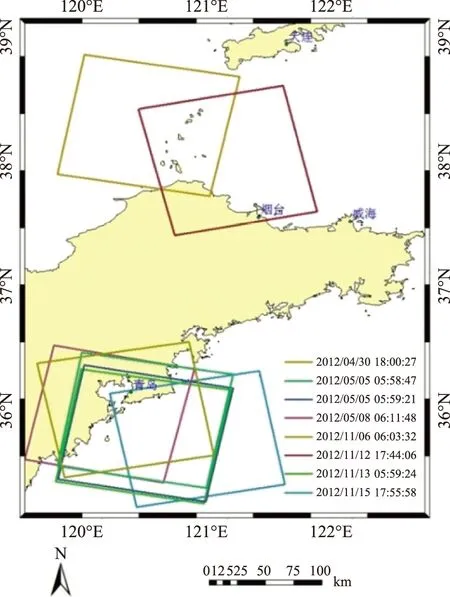
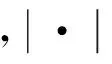
图1 实验数据成像时间和覆盖范围
本文采用8景Radarsat-2 Standard模式,标称分辨率25m,双极化(VV-VH)单视复(SLC)数据作为实验测试数据,图1分别给出了实验数据的成像时间(北京)及影像覆盖范围,按照成像时间的顺序影像依次记为IMG-1,2,…,8。利用AIS船只位置信息,分别在8景影像中提取15~20对感兴趣区域(ROI)样本(其中,由于IMG-6影像覆盖范围内的船只目标较少,因而只提取到15对ROI样本,其余影像则都提取了20对样本),共计155对ROI样本,每对样本分别包含一个船只目标样本和一个船只周围的海面样本。
图2 船只样本和海面样本的香农熵均值
为分析香农熵特征在船只与海面上表现的不同特性,本文分别统计155对ROI样本,得到每对船只样本和海面样本的香农熵均值。图2为全部155对ROI样本的船只样本均值和海面样本均值。图中相同颜色和标记的线表示从同一景影像中提取的样本,不同颜色标记的实线分别表示8景影像的船只样本香农熵均值,虚线表示与船只样本匹配的海面样本香农熵均值。
本文利用船只目标与海面的香农熵特征的统计均值分析香农熵特征在船只与海面上表现的不同特性。由于统计均值结合了船只目标香农熵特征的统计峰值和统计最小值以及与海面的香农熵特征统计峰值的优势和特点,在融合统计峰值的基础上相比统计峰值更具有普遍适用性,同时克服了统计峰值带来的偶然性因素。
根据图2的结果可以得出以下结论:香农熵特征在船只与海面上显示出不同的特性,主要表现在船只目标的香农熵特征的统计均值明显为正值,而海面的香农熵特征的统计均值为负值。

图3 典型SAR图像(截取IMG-5影像的区域,中心入射角为34.4°)
图3(a)为一个包含3艘船只目标的典型SAR场景,图3(b)为该场景的VV幅度的三维立体图,图3(c)为平均极化协方差矩阵行列式的三维立体图。比较图3(b)和图3(c)可以发现,协方差矩阵的行列式能够明显提高船海对比度。图3(d)为香农熵特征的三维立体图。可见,船只目标的香农熵为正值,海面的香农熵为负值。
综上所述,可以通过选取合适的阈值,利用阈值分割的方法实现船只目标检测。
2 基于香农熵的船只目标检测算法
2.1 算法流程
本文提出了一种基于香农熵特征的双极化SAR船只目标检测算法。首先利用双极化SAR数据提取极化散射矩阵S,然后采用N×N滑动窗口计算平均极化协方差矩阵C,根据式(3)或式(4)计算香农熵SE;最后,根据给定的阈值Th,当式SE≥Th时,目标为船只,否则目标为海面。算法检测流程如图4所示。从算法流程可以看出,算法的检测时间主要取决于由原始数据计算香农熵的过程。该算法使用了两个参数:N和Th,下面详细介绍其含义与取值情况。
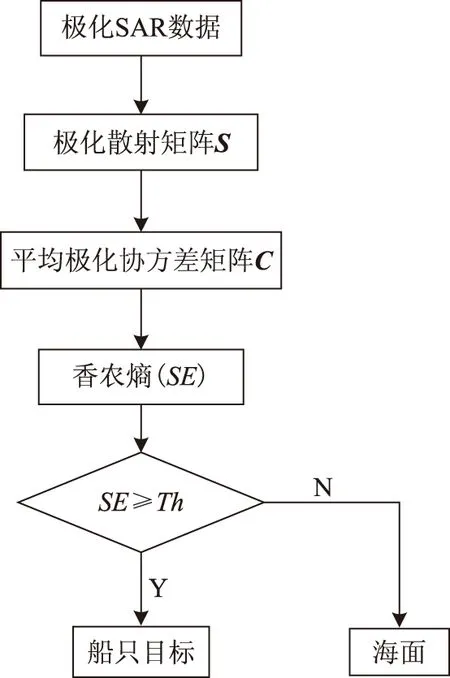
图4 基于香农熵的船只目标检测算法流程示意图
2.2 参数选择分析
本文算法需要引入两个参数:滑动窗口N和检测阈值Th。N表示计算平均极化协方差矩阵时设置的统计平均窗口大小。显然,N越大,统计窗口中的像元越多,这样可以降低斑点噪声,但算法检测时间也将增加,图像的空间分辨率也将降低,可能导致检测结果中出现漏检目标,同时使船只目标的边缘轮廓变得模糊。Th表示分割船只目标与海面的阈值。根据第二节的分析可知,Th越小,漏检目标越少,但可能出现虚警目标。
本文利用34个船只样本(包含周围海面)作为实验数据,通过控制其中一个参数改变另一个参数的方式,分析参数N和Th对检测性能的影响。为有效评价算法检测性能,这里使用品质因数FOM进行定量分析[3]:
(5)
其中,Ntt为正确检测到的船只目标,Nfa为虚警目标,Ngt为实际的船只目标。因此,FOM越大则表示检测性能越好。
上一节分析了船只目标与海面的香农熵特征的统计均值,已经得到船只目标与海面的香农熵特征统计均值在0值的附近,则在参数阈值Th的选择中,结合香农熵特征的统计峰值,只需测试Th在[-4,3]范围内的检测效果。其中3可认为是船只目标香农熵特征的峰值统计平均,-4可认为是海面香农熵特征的峰值统计平均。这样既能够兼容到船只目标的香农熵特征统计峰值,又能够兼容到海面的香农熵特征统计峰值,通过反复实验,得到一个较为合理的阈值参数选择建议。
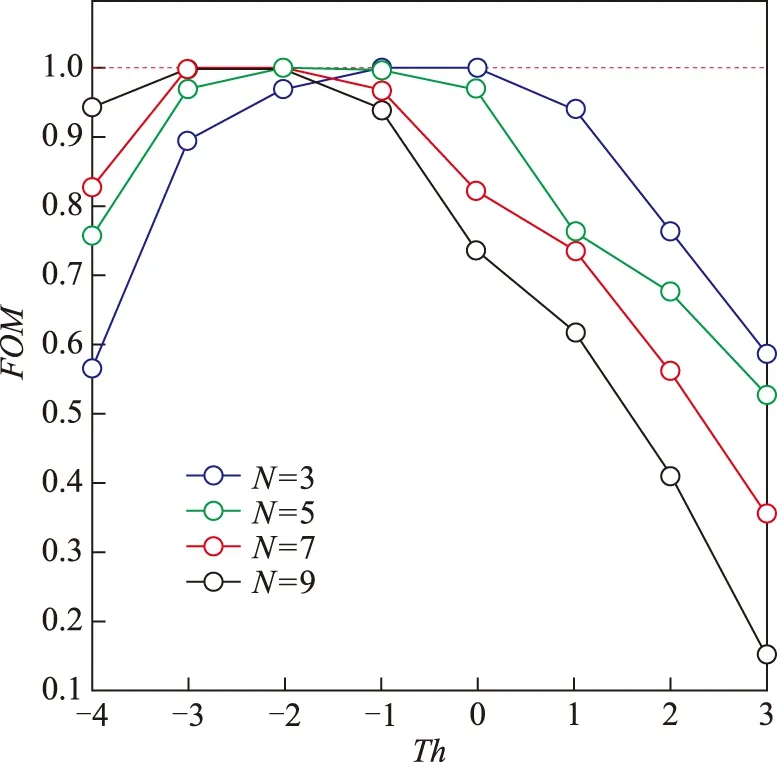
图5 不同参数N和Th下的检测性能曲线图
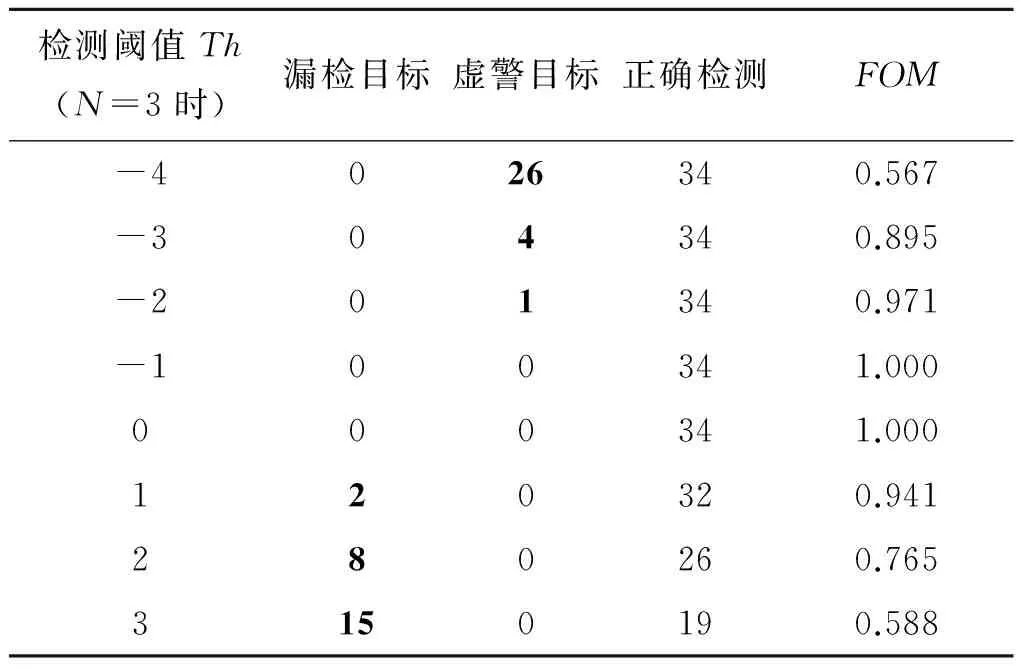
检测阈值Th(N=3时)漏检目标虚警目标正确检测FOM-4026340.567-304340.895-201340.971-100341.000000341.000120320.941280260.7653150190.588
图5为利用不同参数N和Th分别对34个船只样本进行船只目标检测的检测性能曲线图,横坐标表示Th(Th∈[-4,3]),纵坐标表示FOM(FOM∈[0,1])。图中4种颜色的曲线分别表示N=3,5,7,9条件下FOM随Th的变化情况。从图5可以看出,当Th取[-4,-2]范围时,随着N的增大,FOM逐渐升高;当Th取[-1,3]范围时,随着N增大,FOM逐渐降低。产生这种现象的原因是,当Th大于-1时,结果中虚警目标较少,漏检目标较多,当Th小于-1时,结果中虚警较多,漏检较少(如表1所示,虚警和漏检分别出现在Th=-1的两侧)。可见当Th取[-1,0]范围内时,FOM保持较好。综合滑动窗口N和检测阈值Th对检测性能的影响,本文建议参数设置为N=3,Th=-1。
2.3 检测结果及评价
为了进行算法对比分析,本文采用的实验数据源为IMG-3和IMG-4,从这两景影像中提取两个子区域,分别为1#区域418像素×403像素,等效视数[15](ENL)为0.1683;2#区域436像素×564像素,等效视数为0.5089(如图6(a)和图7(a)所示)。根据AIS报告和目视解译的综合分析结果,1#区域具有18艘船只目标,2#区域有23艘船只目标。
本文分别利用K分布CFAR、G0分布CFAR和XC算法与本文算法进行算法对比,其中两种CFAR算法用于检测VV强度图。根据参数分析结果,本文参数为设置为N=3,Th=-1,两种CFAR算法的虚警率都是经过多次测试最优参数,XC算法则采用文献[11-12]建议的参数。检测结果如图6和图7所示,其中1表示海面,0表示船只,三角形△表示虚警目标。表2和表3分别为图6和图7实验区域的4种算法的检测结果及检测时间。
从检测精度上看,1#区域的4种算法都全部检测出18艘船只目标,没有出现虚警,如图6(b)、图6(c)、图6(e)、图6(f)所示。因此这4种算法的FOM都等于1.00(表2)。2#区域的检测结果如图7所示,4种算法都全部检测出23艘船只目标,但2种CFAR算法都出现5个虚警目标(如图7(b)、图7(c)所示)(通常CFAR算法在允许的条件下虚警率一般设置的较高,因此CFAR检测结果中没有出现漏检),XC算法也出现2个虚警目标(图7(f))。只有本文算法的FOM等于1,其余算法FOM都小于1(表3),因此,本文算法在检测精度上要优于其他检测算法。
从检测效率上看,传统CFAR算法检测时间明显高于本文算法和XC算法,本文算法与XC算法的检测时间几乎相等(见表2和表3检测时间列)。从算法计算量也可得出类似结论,通常CFAR算法需要进行参数估计,在给定虚警率时需要计算检测阈值,这大大增加算法的计算量,因此CFAR算法检测时间较高。由图4可知,本文算法计算量主要集中在利用极化复数据计算香农熵的过程中,因此计算量较低,检测时间低于CFAR算法。
由以上实验结果可以得出,本文基于香农熵的船只目标检测算法在检测精度和检测效率上分别优于传统CFAR检测算法和XC算法,表现出较好的检测性能。尤其在噪声较高的环境下(等效视数小于1),本文算法依然能够保持较高的检测效率和精度。
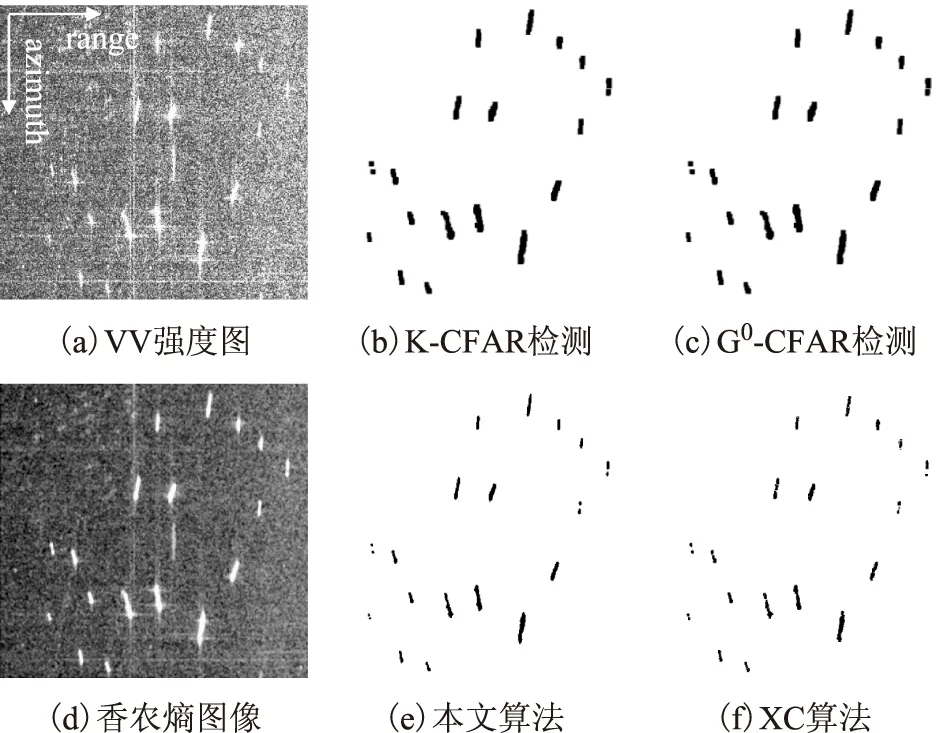
图6 1#区域(ENL=0.1683)的检测结果对比
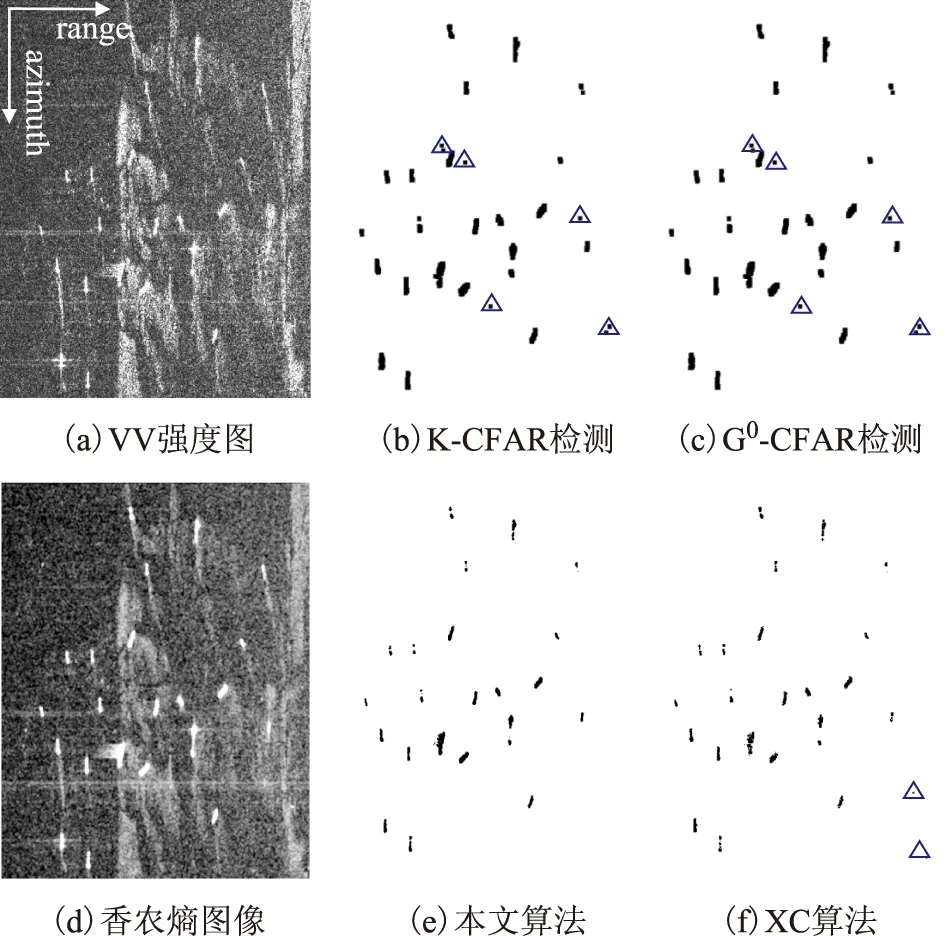
图7 2#区域(ENL=0.5089)的检测结果对比
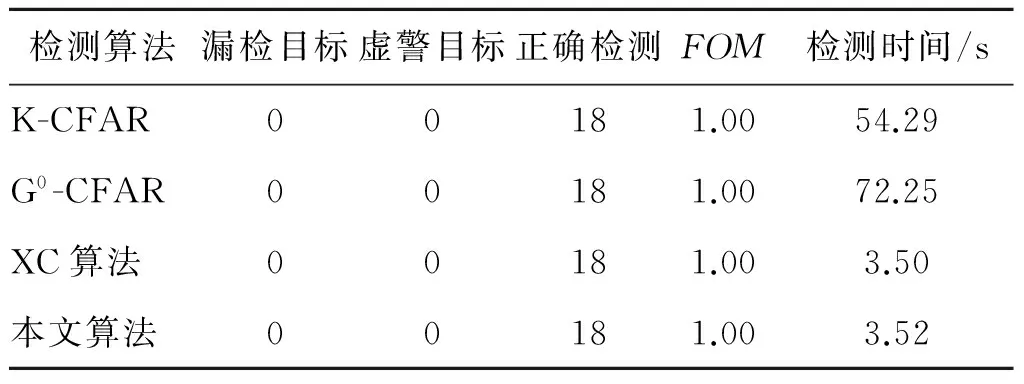
检测算法漏检目标虚警目标正确检测FOM检测时间/sK-CFAR00181.0054.29G0-CFAR00181.0072.25XC算法00181.003.50本文算法00181.003.52

表3 图7实验结果
表4汇总了分别从本文全部8景影像中提取的船只目标区域的检测结果,全部区域共包含100个目标,本文基于香农熵的船只目标检测算法正确检测出99个目标,没有虚警存在,基于XC的船只目标检测算法正确检测出99个目标,出现2个虚警目标。表4分别给出了每个区域的本文算法和XC算法的检测结果及时间。从表中可以看出,两种算法的检测时间几乎相等,检测的品质因数也几乎相等。但在某些情况下(如图7的IMG-4检测结果),XC算法的检测精度要低于本文算法。

表4 8景影像的提取区域的检测结果
3 结束语
本文针对C波段Radarsat-2双极化SAR数据,提出了一种基于极化香农熵特征的船只目标检测方法。该方法有效克服了传统CFAR方法因虚警率设置产生的算法自动性差的缺点。文中利用8景SAR数据进行测试,结果表明本文算法具有较好的检测性能。得到的主要结论如下:极化香农熵特征的特性表现为:船只目标的香农熵为正值,海面的香农熵为负值,利用简单的阈值分割,可以实现船海目标的分离;通过分析算法参数对检测结果的影响,根据参数选择的依据,建议参数设置为滑动窗口N=3,检测阈值Th=-1;本文算法在高噪声条件下也表现出较好的检测性能,当等效视数小于1时,FOM优于0.93;相比最优XC特征,香农熵特征利用了更丰富的极化信息,本文算法的检测结果优于XC算法。
本文算法测试的数据为中等分辨率的C波段Radarsat-2双极化数据,对于其他波段和全极化数据的应用,尤其是在更高分辨率的情况下(船只由点目标变成面目标),算法的适用性还需研究。文中主要研究算法在高噪声条件下的应用,今后还可以进一步分析算法在高海况条件下应用。
[1] VACHON P W,THOMAS S J,CRANTON J,et al.Validation of ship detection by the RADARSAT syntheticaperture radar and the ocean monitoring workstation[J].Canadian Journal of Remote Sensing,2000,26(3):200-212.
[2] WACKERMAN C C,FRIEDMAN K S,PICHEL W G,et al.Automatic detection of ships in RADARSAT-1 SAR imagery[J].Canadian Journal of Remote Sensing,2001,27(4):371-378.
[3] ZHANG X,ZHANG J,MENG J M,et al.A novel polarimetric SAR ship detection filter[C].IET International Radar Conference,2013:266-270.
[4] CHEN J,CHEN Y,YANG J.Ship detection using polarization cross-entropy[J].Geoscience and Remote Sensing Letters,IEEE Transactions on,2009,6(4):723-727.
[5] LIU C,VACHON P W,GELING GW.Improved ship detection with airborne polarimetric SAR data[J].Canadian Journal of Remote Sensing,2005,31(1):122-131.
[6] 种劲松,朱敏慧.SAR图像舰船及其尾迹检测研究综述[J].电子学报,2003,31(9):1356-1360.
[7] XING X W,CHEN Z L,ZOU H X,et al.A fast algorithm based on two-stage CFAR for detecting ships in SAR images[C].IEEE 2nd Asian-Pacific Conference on Synthetic Aperture Radar,2009:506-509.
[8] WANG C,LIAO M,LI X.Ship detection in SAR image based on the alpha-stable distribution[J].Sensors,2008,8(8):4948-4960.
[9] FRERY A C,MULLER H J,YANASSE C C F,et al.A model for extremely heterogeneous clutter[J].Geoscience and Remote Sensing,IEEE Transactions on,1997,35(3):648-659.
[10] QIN X,ZHOU S,ZOU H,et al.A CFAR detection algorithm for generalized gamma distributed background in high-resolution SAR images[J].Geoscience and Remote Sensing Letters,IEEE Transactions on,2013,10(4):806-810.
[11] NUNZIATA F,MIGLIACCIO M,BROWN C E.Reflection symmetry for polarimetric observation of man-made metallic targets at sea[J].IEEE Journal of Oceanic Engineering,2012,37(3):384-394.
[12] VELOTTO D,NUNZIATA F,MIGLIACCIO M,et al.Dual-polarimetricTerraSAR-X SAR data for target at sea observation[J].Geoscience and Remote Sensing Letters,IEEE Transactions on,2013,10(5):1114-1118.
[13] RÉFRÉGIER P,MORIO J.Shannon entropy of partially polarized and partially coherent light with gaussian fluctuations[J].JOSA A,2006,23(12):3036-3044.
[14] LEE J S,POTTIER E.Polarimetric radar imaging:from basics to applications[M].New York:CRC press,2009.
[15] 王隽,杨劲松,黄韦艮,等.多视处理对SAR船只探测的影响[J].遥感学报,2008,12(3):399-404.
Dual-polarimetric SAR Data for Ship Detection Based on Shannon Entropy
LONG Meng-qi1,2,YANG Xue-zhi1,MENG Jun-min2,LIU Gen-wang2,ZHANG Xi2,DONG Zhang-yu1
(1.SchoolofComputerandInformation,HefeiUniversityofTechnology,Hefei230009;2.FirstInstituteofOceanography,StateOceanicAdministration,ShandongQingdao266061)
The traditional constant false alarm rate (CFAR) ship detection methods have poor automaticity,and it is difficult to set false alarm rate.According to the principle that shannon entropy shows different features for ship and sea,we present a new ship detection algorithm based on shannon entropy.To test the detection performance of the new method,eight scenes of C band Radarsat-2 dual-polarimetric SAR test data were used.The algorithm of K-CFAR,G0-CFAR and XC ship detection algorithm based on reflection symmetry were contrastively analyzed with the new method for ship detection.The experimental results demonstrate that the new method has preferable detection performance.
dual-polarimetric;synthetic aperture radar;shannon entropy;ship target;target detection
2014-09-01
2014-11-12
国家自然科学基金(61371154、41076120、61271381、61102154);光电控制技术重点实验室和航空科学基金联合资助项目(201301P4007);中央高校基本科研业务费专项资金(2012HGCX0001);海洋公益性项目科研专项(200905029)。
龙梦启(1990—),男,在读硕士研究生,研究方向为遥感图像目标检测。
E-mail:longmq1990@163.com
杨学志(1970—),男,博士生导师,研究方向为遥感图像目标检测与解译。
E-mail:xzyang@hfut.edu.cn
10.3969/j.issn.1000-3177.2015.05.002
TP751
A
1000-3177(2015)141-0014-06
猜你喜欢
兵工学报(2022年11期)2022-12-01 12:52:12
雪豆月读·低年级(2021年7期)2021-08-27 08:07:42
牡丹(2021年11期)2021-07-20 06:02:34
物联网技术(2019年9期)2019-11-06 06:24:49
科学与财富(2017年24期)2017-09-06 09:52:35
新东方英语·中学版(2017年4期)2017-05-04 12:53:12
设备管理与维修(2017年1期)2017-04-11 03:21:42
少年博览·小学低年级(2016年6期)2016-11-23 19:58:35
中国塑料(2015年9期)2015-10-14 01:12:18
舰船科学技术(2015年8期)2015-02-27 15:38:51