
雷达捷变频技术对干扰源定位的方法研究*
2015-03-14 12:32魏永峰
舰船电子工程 2015年10期
魏永峰
(91404部队92分队 秦皇岛 066000)
雷达捷变频技术对干扰源定位的方法研究*
魏永峰
(91404部队92分队 秦皇岛 066000)
针对新体制具有回波信号数字化显示处理的警戒雷达,利用雷达捷变频技术实现对雷达干扰源进行低精度定位。采用灰度质心法计算雷达干扰源位置、并对计算结果进行误差分析,为实时跟踪定位运动干扰源位置的可行性提供方法。该方法有利于实现作战系统快速判研和对战场对抗态势的全局掌握,是一种有效的雷达辅助探测功能。
捷变频; 干扰; 灰度质心法; 警戒雷达
Class Number TN95
1 引言
现代战争中,警戒雷达遭遇最严重的威胁来自有源干扰。由于威胁目标的雷达回波可能被掩盖在干扰杂波中,导致指挥系统不能确定空空或空海导弹的发射时机,无法引导飞机在安全距离上完成攻击任务。为了打击和摧毁干扰辐射源,辐射源定位技术伴随雷达电子对抗产生。辐射源定位技术最基本的定位方法是平面定位法和空间定位法,根据定位条件的不同,又可分为单点定位和多点定位。单点定位有飞越目标定位法、方位/仰角定位法,多点定位有测向交叉定位法、多重采样相关定位法等[1~5]。本文提出的基于灰度质心法的雷达捷变频技术干扰源定位方法属于单点定位法。利用雷达捷变频技术,采用灰度质心算法对干扰源进行定位,即可掌握对方干扰掩护的方位,又可实现为飞机提供干扰源打击的概略引导信息。
2 定位技术实现的原理及条件
2.1 实现条件
基于灰度质心法的雷达捷变频技术干扰源定位方法需要在特定的条件下完成。
1) 雷达具有超低副瓣或副瓣抑制能力,且干扰机与雷达有一定的距离;
2) 雷达具有捷变频功能,且干扰信号基于频率瞄准或储频转发式;
3) 雷达具有数字化信号处理显示功能。
超低副瓣的雷达天线设计技术不仅可以聚焦辐射功率,增大雷达的探测距离,也可以有效避免干扰信号从雷达的副瓣进入,提高雷达的抗干扰能力。这种技术迫使干扰信号仅能从雷达主瓣进入,见图1(a),从而使干扰信号携带了方向信息,为干扰源定位提供了基础条件。
捷变频是一种抗干扰技术,即雷达快速改变射频频率,以迫使远距离干扰机和威胁目标自带的干扰机分散其现有的干扰功率,来覆盖增宽了的射频带宽。如果远距离干扰机坚持采用窄带瞄频或数字储频转发方式产生干扰信号,干扰信号进入雷达接收机就存在一个延迟时间,这个延迟由干扰机与雷达之间的双程信号传输距离、干扰机侦察测频处理时间、干扰机内部射频线长度等因素决定。脉间或脉组高速捷变频技术恰好利用了这个延迟,其高速的频率跳变使远距离干扰机无法紧随雷达信号实施干扰,造成相同频率的干扰信号在干扰机与雷达距离之内传播滞后于雷达回波,此距离内的雷达回波处理未受到干扰,形成如图1(c)的效果[6~7]。
雷达数字化显示处理使干扰杂波与目标回波以点迹形式在雷达显示,有利于对干扰源位置的数据采集,减少误差,如图1(b)、1(c)。
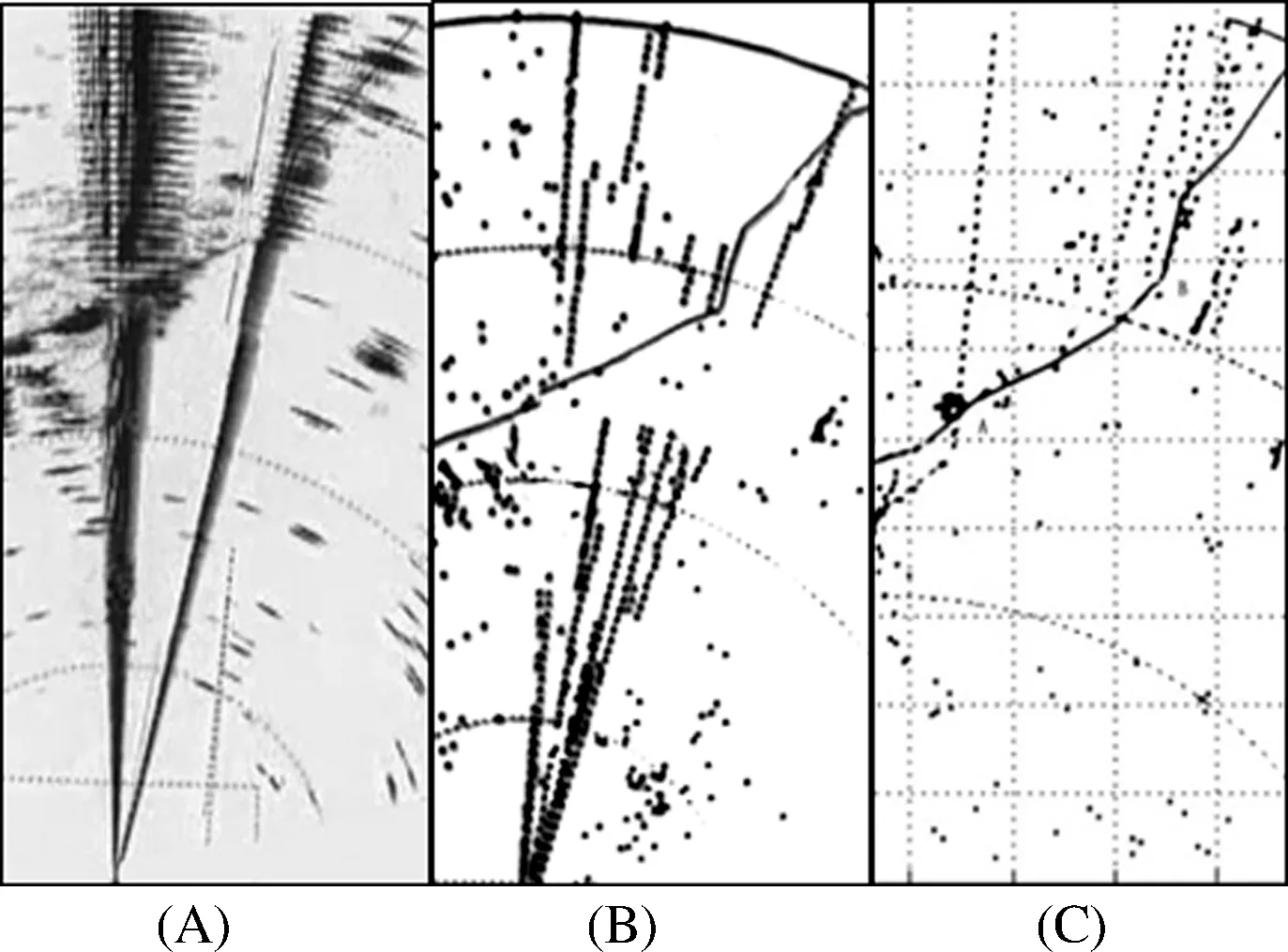
图1 雷达数字化显示及采取捷变频效果图
2.2 实现原理
在真实战场条件中,当雷达与干扰机距离较远时,大多数情况,干扰能量仅能从雷达的主瓣和第一副瓣进入,并在雷达显示器上形成主瓣式条状干扰扇区。如果雷达采用捷变频抗干扰手段有效,往往可以消弱干扰的能量,并能去除干扰机与雷达之间的干扰亮区。这时,可以清晰观测干扰亮区的起始位置,在经过十几个扫描周期的采样后,可构画出干扰机位置分布图,之后使用定位算法可计算出干扰机位置。如果针对一部雷达进行多次干扰源定位误差校准,可进一步缩小结果误差,减少计算所需的数据采集样本,达成对运动干扰源的准实时定位[8~10]。过程原理如图2所示。

图2 定位方法实现的过程原理示意图
3 定位技术方法
采用灰度质心算法的雷达捷变频技术对干扰源进行定位方法[11],是一种以灰度为权值的加权型心法,干扰点分布数据为I(i,j,p),以I(i,j,p)数据为坐标点重构图像矩阵W(i,j,p),分布图像的质心S(x0,y0,z0)为
(1)
(2)
(3)
其中W(i,j,p)为权值,灰度值为0/1,0代表无数据,1代表有数据。由于干扰点的测量受到每个扫描周期雷达回波处理差异的影响,副瓣干扰形成的数据点会成为质心计算的偏离点,因此在进行计算前应设定取值阈值。L为划分分布区域的阈值。
(4)
干扰源位置以干扰噪点的起始点为准,数量N=n×T/t,其中T为采集区间的时间长度,t为雷达天线的扫描周期,n为每个周期干扰源数量。例如,图2(c)是雷达的某次扫描图像,图上有n=6个干扰源位置点。表1中列出了数据的部分样本。为了便于计算,数据由经纬度值转换为X/Y坐标系,由于无高度信息,Z坐标省略。
根据式(1)、式(2),计算并画出干扰机位置,效果如图3所示,式(1)得到数据在X轴投影的质心,式(2)得到数据在Y轴投影的质心。由于数据分布集中在两个位置,在计算之前应划分数据区域1、区域2,并且利用式(4)剔除偏离点,这样就能在图中得到两个质心S1(1645.83,1014.9),S2(1142.67,1262.6),以”+”表示;干扰机真实位置R1=(1608,1107),R2=(1104,1401),以“*”表示。
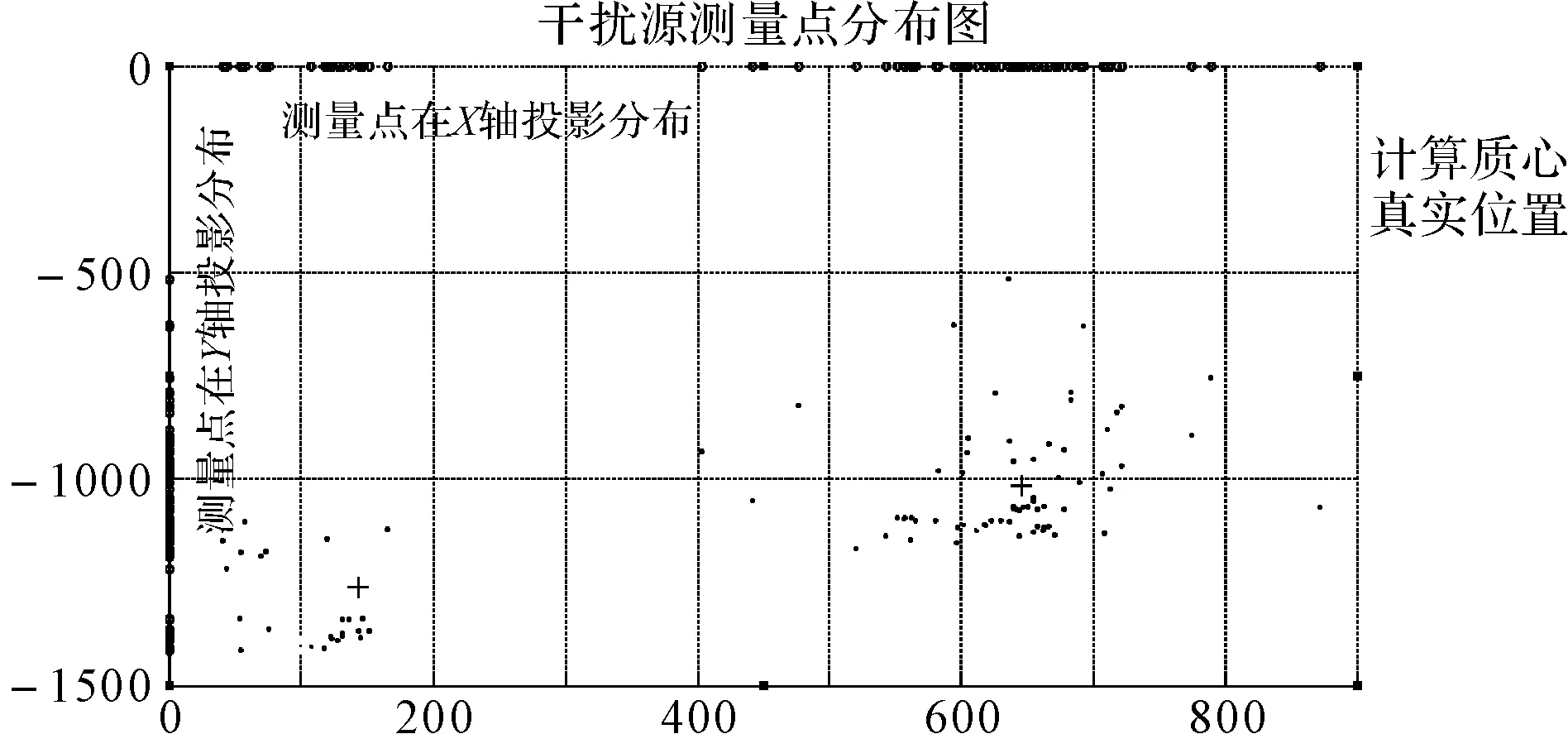
图3 干扰点采样位置分布图
4 定位结果分析
根据图3所示,比例尺为1∶91.86(单位:m),区域1的质心距离实际点9146.41m,区域2的质心距离实际点13200.68m。由于无校准的定位误差较大,需要进行进一步处理才能获得理想结果[12~13]。
4.1 随机误差
采样点相对质心的分布趋势表现数据的随机性,图4、图5显示了位置数据的均值和波动,经计算,区域1数据的标准差为7.95km,区域2的标准差为10.09km。

图4 区域1采样点较质心离散情况
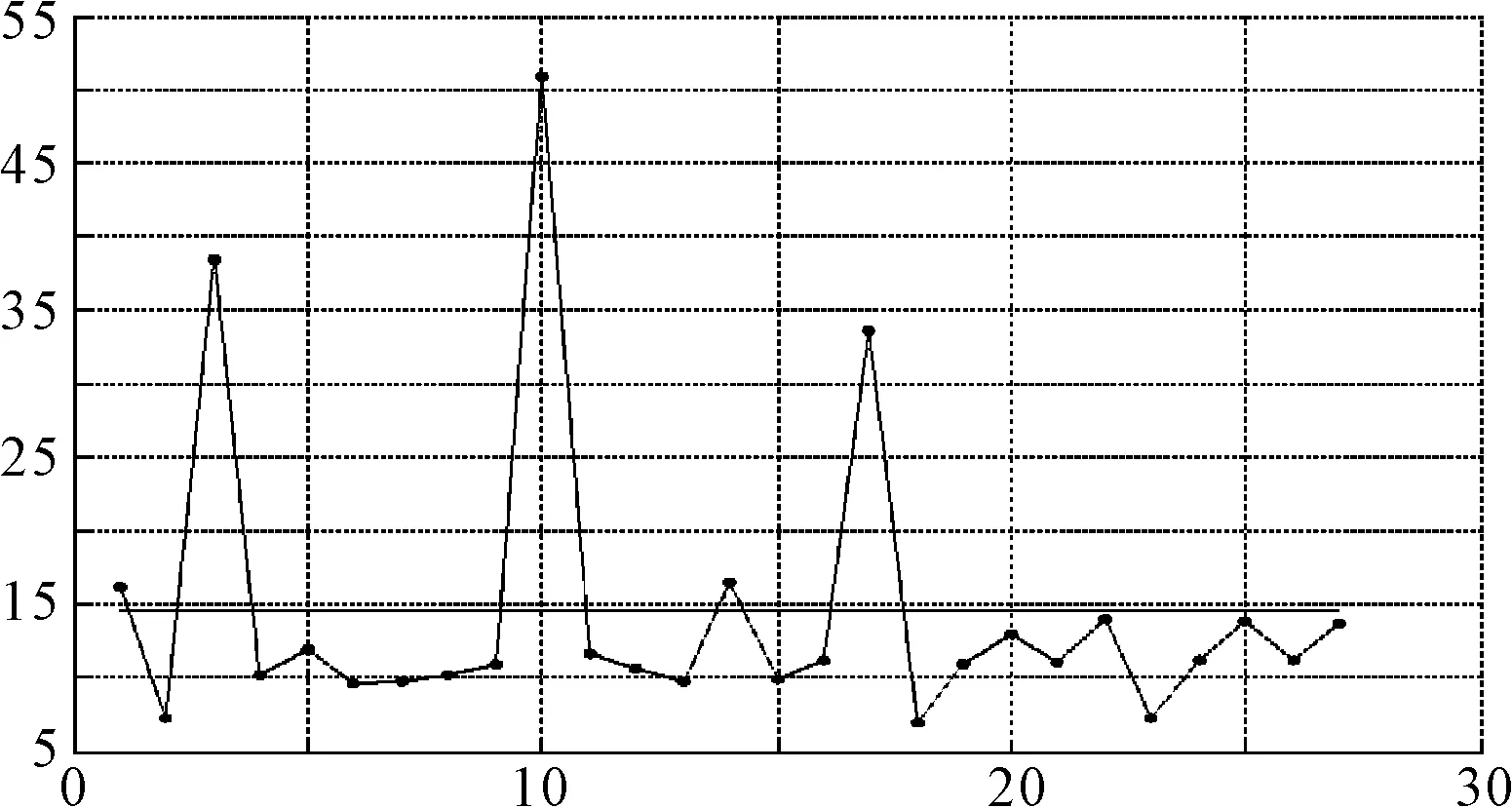
图5 区域2采样点较质心离散情况
图3中,区域1、区域2采样点集中分布于区域底部,构成较明显的集中区,其它分散点采样来自于副瓣干扰,在质心阈值设置时可以剔除;区域2中形成了两个集中区,从雷达屏幕观察上部集中区可能是副瓣干扰,在采样时可以滤除上部的集中区域。经过阈值优化设置后,随机误差得到降低,如图6所示。
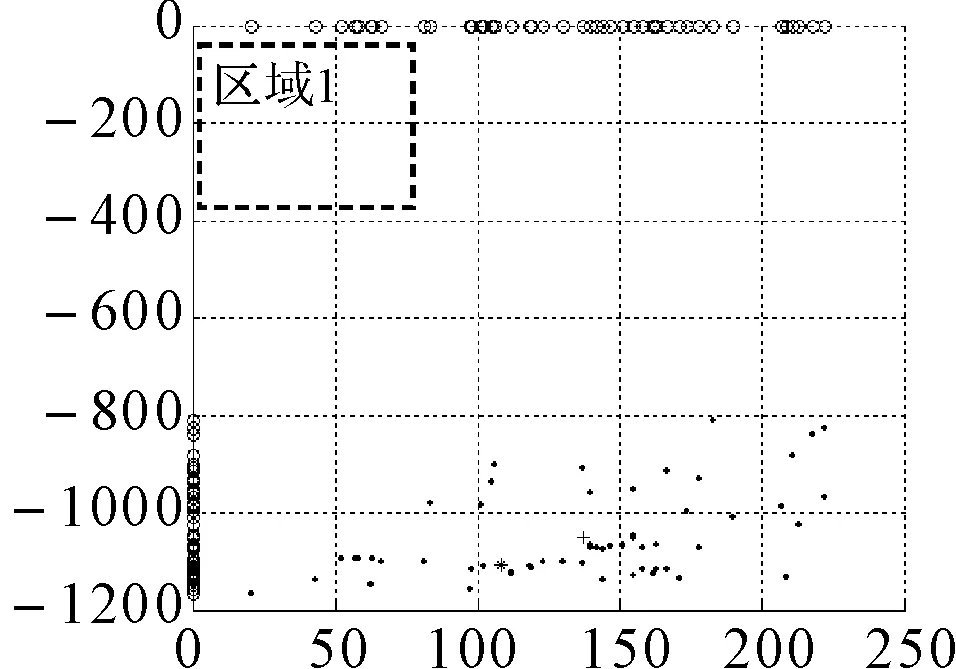
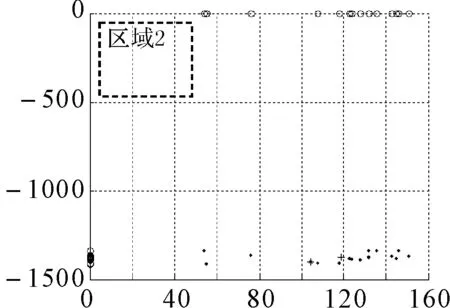
图6 经阈值优化设置后质心计算结果
经过阈值优化设置后,区域1数据的标准差为4918.9m,区域2的标准差为1810.8m,区域1的质心S1(1639.5,1047.4)距离实际点6192.64m,区域2的质心S2(1118.9,1374.8)距离实际点2768.77m,误差分别降低32.3%和79%。事实上,S1点的干扰机较S2点干扰机的干扰信号能量及能量起伏较大,对雷达副瓣的干扰不稳定,使得雷达对S1的定位不准确,因此在数据采样时可以考虑选择距离最新的干扰点,即每次扫描周期只录取干扰方向上最近的干扰点。这种录取方法操作简单,结果精度高,但对分辨主瓣干扰的能力要求较高。
4.2 系统误差
由图3、图6所示,质心在同一个方向上偏离实际点,这是由于干扰机内部在转发雷达信号或测量雷达信号存在系统延迟T,这个延迟导致雷达观测到的干扰机位置比实际的位置要远一些,不同的干扰机系统延迟T是不同的,同一部干扰机工作在不同频率时T也会不同。另外一个系统误差来自雷达本身,由于雷达精度与量程、天线扫描方式、工作频率等有关,在对干扰机定位时应考虑以上因素。
5 结语
数据处理结果表明雷达捷变频技术的干扰源定位方法不能实现高精度定位,该方法的实际应用价值在于可以利用现有雷达装备提供干扰威胁源位置的估计信息,定位误差小于5km。该方法不属于高精度雷达目标跟踪功能,而是一种雷达探测能力的延伸,其最大的优势在于可以估计运动干扰源的移动线路,比如描绘携带干扰源飞机的航线,有利于对敏感空域或海域敌情的侦察预警。从经济条件和现有技术条件来看,该方法在雷达上推广易实现,技术改造需求少,是一种行之有效的雷达辅助探测功能。
[1] 丁鹭飞.雷达原理[M].西安:西北电讯工程学院出版社,1984:5-25.
[2] 丁鹭飞.雷达系统[M].西安:西北电讯工程学院出版社,1982:3-30.
[3] 赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,1999:3-27.
[4] 侯印鸣.综合电子战[M].北京:国防工业出版社,2000:15-50.
[5] 张锡熊.雷达抗干扰原理[M].北京:科学出版社,1981:10-70.
[6] 李潮,张巨泉,等.干扰频率捷变雷达技术及效果度量[J].现代雷达,2004,26(1):12-15.
[7] 黄洪旭,徐晖.雷达捷变频抗干扰性能分析及评估研究[J].航天电子对抗,2001(1):22-25.
[8] 齐欢,王小平.系统建模与仿真[M].北京:清华大学出版社,2004:3-10.
[9] 万建伟.信号处理仿真技术[M].长沙:国防科技大学电子科学与工程学院,2003:2-5.
[10] 熊光楞.彭毅.先进仿真技术与仿真环境[M].北京:国防工业出版社,1997:30-76.
[11] H. C. van ASSEN, M. Egmont-PETERSEN, J. H. C. REIBER. Accurate object localization in gray level images using the center of gravity measure: accuracy versus precision[J]. IEEE Transactions on Image Processing,2002,11(12):1379-1384.
[12] 安树林,董印权,等.海军武器装备试验仿真技术[M].北京:国防工业出版社,2006:142-295.
[13] Merrill I. Skolnik.雷达手册[M].王军,等译.第二版.北京:电子工业出版社,2003:5-10.
Interference Localization Method for Warming Radar Based on Radar Frequency Agile Technology
WEI Yongfeng
(Unit 92, No. 91404 Troops of PLA, Qinhuangdao 066000)
For warming radar which echo digitization, the low-precision interference localization method is studied by using radar frequency agile technology. The interference localization is calculated based on gray centroid algorithm, and the error analysis of calculation result is made, which provides the feasible instruction method for the real-time localization of movement interference. The method is in favor of the realization of rapid judgment and study on combat system and the global mastery of battlefield confrontation situation. It is an effective aided detecting function of warming radar.
frequency agile, interference, gray centroid algorithm, warming radar
2015年4月5日,
2015年5月26日
魏永峰,男,硕士,工程师,研究方向:电子对抗。
TN95
10.3969/j.issn.1672-9730.2015.10.020
猜你喜欢
舰船电子工程(2022年3期)2022-12-01
成都信息工程大学学报(2022年4期)2022-11-18
舰船电子工程(2022年1期)2022-02-12
全球定位系统(2021年5期)2021-12-14
北京航空航天大学学报(2021年9期)2021-11-02
火控雷达技术(2021年2期)2021-07-21
全球定位系统(2020年1期)2020-03-31
航天电子对抗(2019年4期)2019-12-04
北京航空航天大学学报(2017年9期)2017-12-18
电子制作(2017年10期)2017-04-18
