基于MATLAB 与CCS 联合控制的无轴承永磁薄片电机
2015-03-12 09:24:22周昱英
微特电机 2015年8期
周昱英,丁 强,2
(1.南京工业职业技术学院,南京210023;2.南京航空航天大学,南京210016)
0 引 言
无轴承电机将磁轴承和电机功能集成于同一电机定子内,能够实现转子无接触的磁悬浮运行,越来越多应用于超纯净驱动、高转速泵类等场合[1-5]。但是,传统无轴承永磁电机实现五自由度悬浮,通常需要两台无轴承电机串联并配合轴向磁轴承,或者一台无轴承电机配合一个径向磁轴承和一个轴向磁轴承,使电机和相应控制系统复杂度提高。
从减小电机体积和控制复杂度角度,将电机转子做成薄片状,利用被动磁拉力稳定扭转自由度和轴向自由度,再通过对径向自由度主动控制,实现转子五自由度稳定悬浮[6-10]。
由于无轴承永磁薄片电机需要同时实现电机悬浮和旋转,因此控制算法较为复杂,单纯利用DSP CCS 环境进行控制,软件开发的周期较长。因此,本文将MATLAB 与CCS 联合控制的方式引入到无轴承永磁薄片电机控制中,从而使软件开发流程得以简化。同时,该方法大为降低研发人员对DSP 硬件知识的了解度,能够快速实现控制算法,缩短了开发周期。本文搭建了无轴承永磁薄片电机MATLAB与CCS 联合控制的系统模型,在正确的仿真结果前提下,生成可执行代码,实现电机的稳定运行,从而证明本文所采用方法的有效性。
1 数学模型与控制策略
本文以定子6 齿、转子1 对极的三相集中式绕组电机为研究对象,如图1 所示,进行悬浮力和转矩数学模型推导。
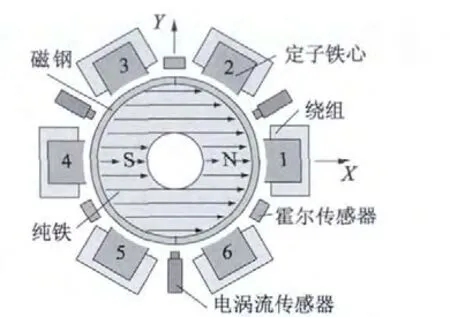
图1 电机结构
假设电机第n 齿上悬浮和转矩绕组磁势及转子永磁体磁势沿气隙的分布函数:

式中:Fs,Ft,Fp为悬浮绕组、转矩绕组及永磁体磁势;Al,At,APM为悬浮,转矩及永磁磁势幅值;θl,θt为悬浮电流,转矩电流初相位;θr,θ 为转子转角和定子坐标角。
由电机结构可写出气隙磁导分布函数:

式中:leg为转子无偏心时物理气隙长度;lpx,lpy为转子x 和y 方向偏心距离;α 为定子齿圆周角。
由式(1)和式(2)计算气隙磁密分布函数:

式中:Asr为气隙磁压差,可依据磁场无源性计算得到。
将式(3)代入式(4)可得转子x 和y 方向悬浮力表达式:
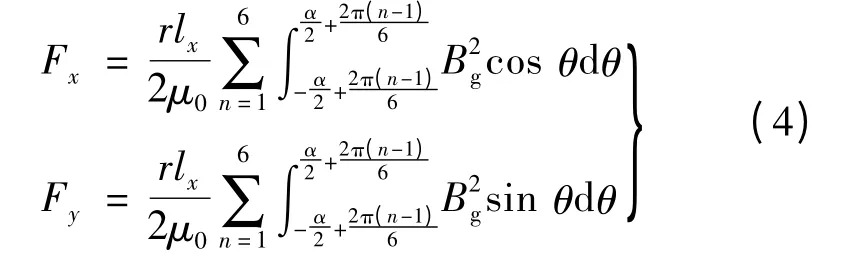
式中:r 为转子半径;lx为有效轴向长度。
根据式(3)可计算气隙储能表达式:

将式(4)展开且将式(5)对转子转角偏导后展开,可得悬浮力和转矩具体表达式:
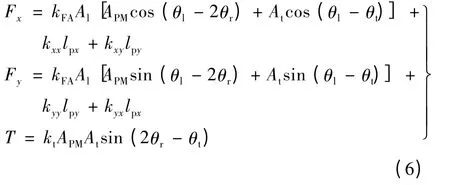
式中:kFA,kxx,kxy,kyy,kyx,kt为与电机结构相关的参数。
考虑电机稳定悬浮时x 和y 方向径向偏心距离lpx和lpy较小,式(6)中相关项可忽略不计。此外,当采用转子磁场定向控制策略时,可实现式(6)中悬浮力与转矩的解耦控制,控制框图如图2 所示。

图2 控制策略框图
2 MATLAB 与CCS 联合控制
MATLAB 在数据分析、计算及可视化方面功能强大,但其数据处理实时性较差。而DSP 具有较强的数据处理实时性,但在CCS 环境下数据分析和编辑能力不及MATLAB。为了将两种软件优点相结合,克服相关缺点,本文利用Target Support Package TC2 和Embedded IDE Link CC 组件实现MATLAB与CCS 联合控制,通过搭建程序算法实现图2 的控制策略。
本文以TMS320F28335 为目标板,在MATLAB/Simulink 环境下建立相应控制主程序和中断服务程序,如图3、图4 所示。
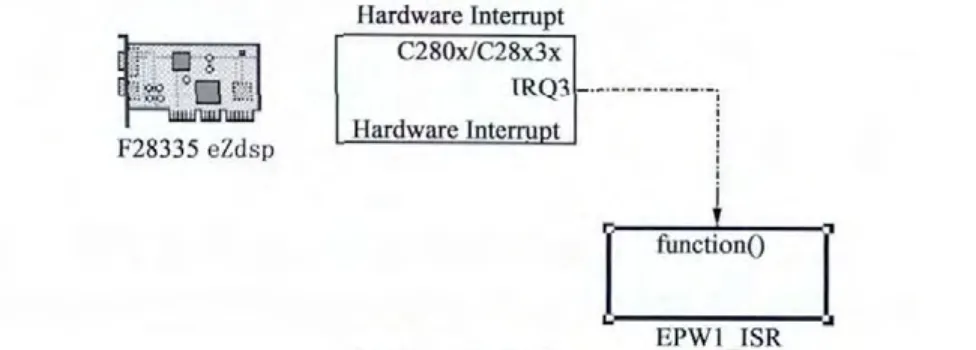
图3 主程序

图4 中断服务模块
主程序主要完成I/O 口、CPU 定时器、外设中断扩展模块及AD 采样等配置和数据的初始化。
系统中断频率为16 kHz,中断服务程序主要实现转子径向位移计算、转子转角计算、悬浮系统闭合控制和转矩系统闭环控制等功能,其中悬浮控制和转矩控制的流程图及其MATLAB 算法实现如图5和图6 所示。

图5 悬浮控制算法框图
由图5 可知,悬浮控制需要实时检测转子径向偏移量。根据图2 的电机位移传感器装配方式可以看出,y 方向位移可直接测量,但x 方向位移由两个相隔120°的位移传感器信号差分获得,据此可构建径向位移检测的MATLAB 算法。

图6 径向位移检测MATLAB 算法实现
为验证上述位移算法正确性,假设y 方向位移给定信号为0.5 -0.5sin t,位移检测控制算法可将给定信号调制为1sin t,据图7 可知,该算法正确有效。

图7 y 方向位移算法验证
由图5 和图8 可知,悬浮和转矩控制需要实时检测转子转角。此外,电机速度信号也需要从转子转角信号计算得出。根据图2 电机霍尔传感器装配方式,依据相应算法即可对转子位置角进行实时解算[11],据此构建转子转矩检测的MATLAB 算法。
为验证转角计算算法的正确性,给定两霍尔传感器互差120°的正弦信号,如图10 所示,转矩计算算法能够正确解算转子位置。
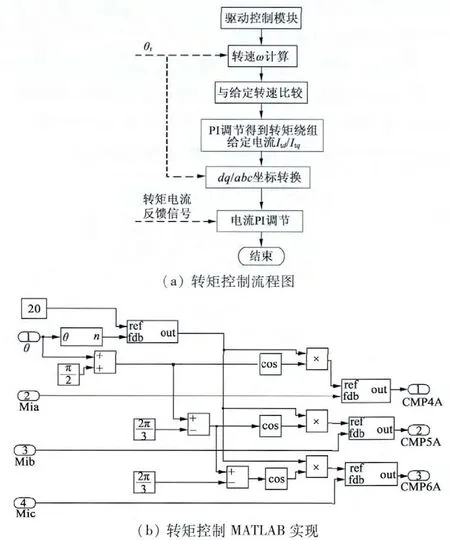
图8 转矩控制算法框图

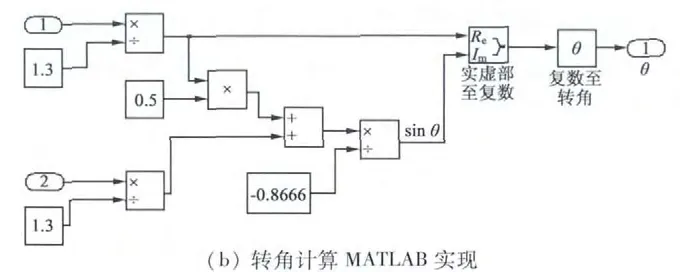
图9 转角计算算法框图

图10 转角计算算法验证
3 实验结果及分析
为了验证本文所采用的MATLAB 与CCS 联合控制策略的正确性,在上述MATLAB 控制算法仿真验证正确后,生成相应控制代码并下载到TMS320F28335 实验平台上,对一台无轴承永磁薄片电机进行相关实验验证。
图11 为转子位置角的波形输出。由实验结果可知,转子转角在[-π,+π]区间线性变化,且能及时由+π 跳转到-π,保证了计算精确性,从而验证上述MATLAB 转角解算算法和模型的正确性。

图11 转子位置角波形
起动驱动系统,给定转速15 000 r/min,根据图12(a)可以看出,经过一定时间动态调整后达到目标转速。图12(b)为稳态转速15 000 r/min 时径向位移波形,可以看出单边位移波动为80 μm,转子处于悬浮运行状态。

图12 高速运行波形
4 结 语
将MATLAB 与CCS 联合控制应用到无轴承永磁薄片电机控制系统软件设计中。利用MATLAB/Simulink 快速图形化建模能力,分别建立了电机转矩系统、悬浮系统的控制模型以及转子位移、角度等检测系统的算法模型。经过仿真验证后,直接将MATLAB 建立的控制模型转换为CCS 下的控制算法,成功实现电机高速15 000 r/min 条件下的稳定运行。本文所采用联合控制方法具有高效、快速与通用性强的特点,对电机(尤其无轴承电机)的控制软件设计具有借鉴作用。
[1] ASAMA J,HAMASAKI Y,OIWA T,et al.Proposal and analysis of a novel single -drive bearingless motor[J]. IEEE Trans. on Ind.Electron.,2013,60(1):129 -138.
[2] YANG S - M,HUANG M - S. Design and implementation of a magnetically levitated single - axis controlled axial blood pump[J].IEEE Trans. on Ind. Electron.,2009,56(6):2213 -2219.
[3] GRUBER W,NUSSBAUMER T,GRABNER H,et al.Wide air gap and large-scale bearingless segment motor with six stator elements[J].IEEE Trans. on Magn.,2010,46(6)2438 -2441.
[4] KARUTZ P,NUSSBAUMER T,KOLAR J W. Novel magnetically levitated two-level motor[J].IEEE/ASME Trans.on Mechatronics.,2008,13(6):658 -668.
[5] BAUMGARTNER T,BURKART R M,KOLAR J W. Analysis and design of a 300 -W 500000 -r/min slotless self-bearing permanent-magnet motor[J].IEEE Trans.on Ind. Electron.,2014,61(8):4326 -4336.
[6] SILBER S,AMRHEIN,BOSCH P,et al.Design aspects of bearingless slice motors[J].IEEE/ASME Trans.on Mechatronics.,2005,10(6):611 -618.
[7] BARTHOLET M T,NUSSBAUMER T,KRAHENBUHL D,et al.Modulation concepts for the control of a two - phase bearingless slice motor utilizing three-phase power modules[J].IEEE Trans.on Ind. App.2010,46(2):831 -840.
[8] WANG X L,ZHONG Q C,DENG Z Q,et al. Current -controlled multiphase slice permanent magnetic bearingless motor with open-circuited phases:fault - tolerant controllability and its verifiction[J]. IEEE Trans. on Ind. Electron.,2012,59(5):2059 -2072.
[9] BARTHOLET M T,NUSSBAUMER T,KOLAR J W. Comparison of voltage - souce inverter topologies for two - phase bearingless slice motors[J]. IEEE Trans. on Ind. Electron.,2011,58(5):1921 -1925.
[10] BARTHOLET M T,NUSSBAUMER T,SILBER S,et al.Comparative evaluation of polyphase bearingless slice motors for fluid -handing applications[J]. IEEE Trans. on Ind. App. 2009,45(5):1821 -1830.
[11] 陈超,陈小元.高速无轴承永磁薄片电机转子径向偏移及转角检测研究[J].微特电机,2013,41(2):31 -34.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
科普童话·学霸日记(2021年4期)2021-09-05 03:59:00
制造技术与机床(2017年6期)2018-01-19 02:41:07
学生天地(2017年30期)2018-01-05 01:52:12
学生天地·小学低年级版(2017年10期)2017-12-11 18:28:16
解放军健康(2017年5期)2017-08-01 06:27:42
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
电源技术(2015年9期)2015-06-05 09:36:06
交通建设与管理(2015年13期)2015-03-20 15:18:48
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54