
开关磁阻电机调速系统的设计与实现
2015-03-11 06:46:47陈世军王陈宁查长礼
安庆师范大学学报(自然科学版) 2015年3期
陈世军,王陈宁,查长礼
(安庆师范学院 物理与电气工程学院,安徽 安庆 246133)
开关磁阻电机调速系统的设计与实现
陈世军,王陈宁,查长礼
(安庆师范学院 物理与电气工程学院,安徽 安庆 246133)
摘要:开关磁阻电机调速系统在硬件上采用数字信号处理器与可编程逻辑器件相结合的控制方式,使电路系统得到了大大的简化,更加稳定可靠;在软件控制策略上,在不同的调速阶段采用不同的控制方法,结合了各自方法的优点。整个系统电机结构简单可靠,可在宽广的速度和功率范围内保持较高的能量回馈,具有一定的市场应用价值。
关键词:开关磁阻电机;数字信号处理器;可编程逻辑器件
开关磁阻电机调速系统(简称SRD),是20世纪80年代兴起的一种新型的交流调速系统。由开关磁阻电机(SRM)及其控制器等组成,其中控制器是其核心。整个系统具有电机结构简单、制造成本低、启动转矩大、启动电流小等特点,又具有调速性能好、控制电路简单、控制方式灵活、正反转和起动制动性能好、效率高等优点,是一种性价比很高的现代交流调速系统[1-2]。但同时也具有转矩脉动大、振动噪声大等明显的缺点,随着电机设计及其控制技术的不断发展,这些问题也在得到改善。现在已广泛应用于煤矿机械、纺织机械、家用电器、电动汽车等行业,在未来市场上具有很好的应用前景[3-4]。
大多数的调速装置在高速运行和非额定负载运行时会产生能量的浪费,并且在启动或者要求频繁启动的场合下,启动电流过大,大大影响了电网中其它电器的正常使用。传统的基于开关磁阻电机的调速系统虽然能够在一定程度上解决上述问题,但其传统的控制算法以及单片机设计出来的系统在调速性能上并不具有优越性且系统硬件电路复杂、外围电路多,易造成系统不稳定性。
SRD系统的核心是其控制器的设计,包括软件系统和硬件系统两大部分,而其设计方法又有多种[5]。本文对传统开关磁阻电机调速系统进行改进。
1SR电机的控制策略
1.1SR电机数学模型分析
SR电机的数学模型分析包括线性模型、准线性模型以及非线性模型三种。在工程应用当中,常常用准线性模型来分析设计功率驱动电路以及确定相应的控制方法。它是将实际的非线性磁化曲线进行分段线性化处理。下面给出SR电机准线性模型的电路方程、运动方程以及电磁转矩方程[1-2]。
由电路基本定律可以写出第K相的电压方程:
Uk=Rkik+dψ(θ,ik)/dt=
(1)
式中Uk为加在K相绕组的电压,Rk为K相绕组的电阻,ik为K相绕组的电流,ψ(θ,ik)为K相绕组的磁链,ω为转子转速,θ为转子位置角。可以看出电压方程由三部分组成:第一项为电阻压降,第二项为电感压降,第三项为旋转压降。
按照力学定律可以得到SR电机的机械运动方程:
(2)
式中Te为电磁转矩,TL为负载转矩,J为转动惯量,D为机电系统粘性摩擦系数。
根据准线性模型的分段线性化磁化曲线,得到分段线性化的绕组电感,进而求得电磁转矩方程:
(3)
1.2SR电机的控制方式及其系统结构
开关磁阻电机的定子与转子都是凸极结构,转子上没有绕组也没有永磁体,故其结构简单可靠,它是根据磁通总是沿着最小路径闭合的方式来运行的。目前,对其调速运行的控制方式主要有以下几种[2]:①电流斩波控制方式,②电压PWM控制方式,③角度位置控制方式等。考虑到各种控制方式的优缺点,本文采用多种方式相结合的控制方法:在低速段,由于电流过大,故采用电流斩波控制;中速段采用电压PWM控制与变角度控制相结合的方式;高速段由于速度过大,电流的上升时间很短,故进行角度位置控制。具体实现方法:在低速运行时,控制器采用高过电压斩波频率的频率进行电流斩波,使电流迅速降下来;在中速运行时以恒定的电压斩波频率控制主开关管的开通与关断,并通过调节占空比来调节相绕组两端的平均电压,同时适当的控制角度的变化;高速时采用固定关断角,改变开通角的控制模式,从而实现恒转矩无级调速。
开关磁阻电机控制系统结构如图1所示。根据设定的转速、机械负载情况和位置检测器提供的转子位置信号,控制器通过一定的算法给出相应的控制电流,并适时给出定子绕组的换相控制信号,使电机运转。调速系统设计成闭环控制系统,需要实时地根据转速反馈值计算出电流的给定值,再与电流检测值相比较,得出相应的控制信号,从而保证电机稳定运行[6-7]。
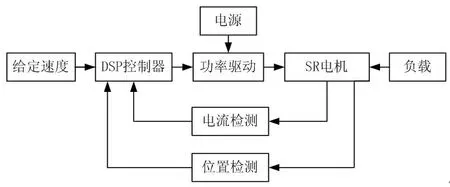
图1SRD系统结构
2系统硬件设计
开关磁阻电机调速系统其硬件电路的设计主要包括控制电路、功率驱动电路以及显示电路三部分,硬件结构如图2所示。
(1)控制电路设计。以美国德州仪器的TMS320F2812为核心控制器,完成速度的分段控制、逻辑关系处理以及产生PWM信号等。主要包括TMS320F2812核心芯片、电源电路、复位电路、A/D采样电路以及功率驱动板接口和显示板接口等。
(2)功率驱动电路设计。主要包括主电路、IGBT驱动电路、信号检测电路以及保护电路部分。主电路采用6路分立元件IGBT组成不对称半桥型电路,具有输入阻抗高、速度快、热稳定性好、且驱动电路简单、驱动电流小,同时具有通态压降小、耐压高、承受电流大等优点。本系统采用A3120为驱动电路。
(3)显示电路设计。以一个单片机为核心控制器,实现与主控板串口数据传输方式,大大降低了主控制器的负荷。其包括电源电路,按键与数码管电路,以及与控制板接口等,用以显示电机的转速、频率、停转以及正反转等。
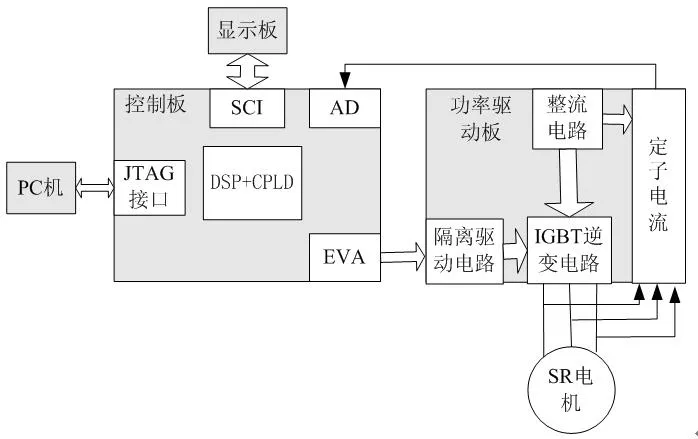
图2系统硬件电路结构
3系统软件设计
系统软件设计是整个控制系统的核心部分。本系统软件的基本思想是通过键盘给定速度,实际速度由光电位置传感器获取,经过滤波整形处理,送到DSP的捕获单元输入,由DSP输出PWM信号,再经过CPLD逻辑电路处理,驱动功率电路控制IGBT的关断与导通,由电流传感器检测电机定子电流,实现开关磁阻电机的转速与电流的双闭环控制。程序软件总体框图如图3所示。整个系统软件程序由主程序及其相关的子程序组成,系统主程序如图4所示,其主要功能:设置系统时钟,初始化事件管理器和SRM 参数,设置可用中断,进行当前转速、位置或电流的显示等。
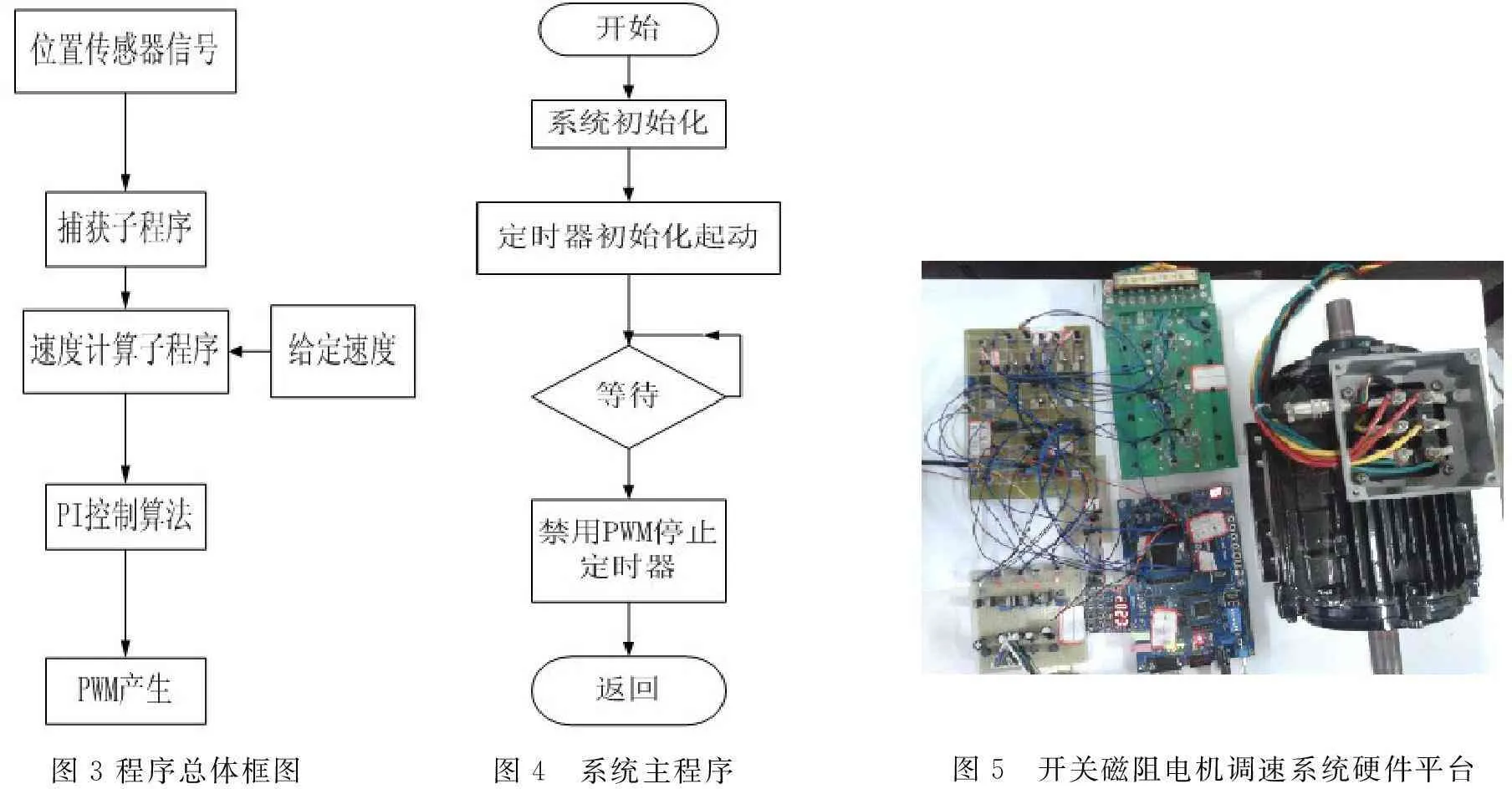
图3程序总体框图 图4 系统主程序图5 开关磁阻电机调速系统硬件平台
4实验测试
在实验室条件下,搭建的开关磁阻电机调速系统硬件平台如图5所示:包括一台带位置传感器的额定功率为1.5 kW,额定电压为220 V,额定转速为2 000 r/min的12/8极开关磁阻电机,DSP控制电路板(带CPLD模块),功率驱动电路板以及电源电路板,显示电路板。整合软硬件调试,整个系统具有稳定的调速性能。启动电流达到2.7 A,启动转矩达到30 N·M,能实现从100 r/min到2 000 r/min的宽广调速范围。
5结论
系统在硬件电路的设计上采用了数字信号处理器(DSP)与可编程逻辑器件(CPLD)相结合的控制方式,使外围电路更加精简,集成化大大提高,整个系统更加稳定可靠。在软件设计方式上,将变角度控制、PWM电压控制、电流斩波控制方式相结合,发挥各种控制方式的优点。 通过对整个软件、硬件系统的联合调试,起动转矩大,启动电流小,具有很好的启动、调速运行性能,有一定的市场应用推广价值。但仍然存在转矩脉动过大、启动不够平稳的问题。为了达到更好的效果,应该从电机结构与控制算法上进行优化设计。
参考文献:
[1] 吴建华.开关磁阻电机设计及应用[M]. 北京:机械工业出版社,2006.
[2] 王宏华.开关磁阻电动机调速控制技术[M].北京:机械工业出版社,1999.
[3] 符传澄,张燕,杨荣,等.开关磁阻电机调速系统在采煤机中的应用[J].煤矿机械,2014,35(10):215-218.
[4] 朱曰莹,赵桂范,杨娜.电动汽车用开关磁阻电机驱动系统设计及优化[J].电工技术学报,2014,29(11):88-98.
[5] P.K.Rdtuad,K.S.Ttiratsatcha.Development of the drive system for a four-phase switched reluctance motors:2014 11th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON),May 14-17,2014[C].Thailand:Nakhon Ratchasima,2014.
[6] 陈世军,查长礼,王陈宁. 基于Simulink的开关磁阻电机调速系统仿真研究[J].机械与电子,2013(12):26-28.
[7] 焦洋.基于DSP的开关磁阻电机数字化控制系统的研究与实现[D].北京:北京交通大学,2007.
[8] 苏奎峰,吕强,耿庆峰,等.TMS320F2812原理与开发[M].北京:电子工业出版社,2005.
Design and Implementation of a Switched Reluctance Motor Speed Control System Based on TMS320F2812
CHEN Shi-jun,WANG Chen-ning,ZHA Chang-li
(School of Physics and Electronic Engineering , Anqing Teachers College , Anqing 246133, China)
Abstract:The design of switched reluctance motor speed control system on hardware combines digital signal processor with programmable logic devices to control, which makes the circuit system simplify, more stable and reliable. By the software control strategy, it adopts different control methods in different stages of speed control. Combining with the advantages of each method the whole system has simple motor structure and reliability, and can be in the broad range of high speed and power energy feedback, and achieve high efficiency and energy saving, etc. It has a certain application value in the market.
Key words:switched reluctance motor, digital signal processor, programmable logic device
文章编号:1007-4260(2015)03-0064-04
中图分类号:TP343
文献标识码:A
DOI:10.13757/j.cnki.cn34-1150/n.2015.03.018
作者简介:陈世军,男,江西九江人,硕士,安庆师范学院物理与电气工程学院讲师,主要研究方向为电机及其控制技术。
基金项目:安庆师范学院校青年基金项目(120001000009)。
收稿日期:2014-11-26
网络出版时间:2015-8-25 15:40网络出版地址:http://www.cnki.net/kcms/detail/34.1150.N.20150825.1540.018.html
