
煤矿开采沉陷自动化监测系统及其精度分析
2015-03-11 03:49吕伟才高井祥蒋法文杭玉付王文波
合肥工业大学学报(自然科学版) 2015年6期
吕伟才, 高井祥, 蒋法文, 黄 晖, 杭玉付, 王文波
(1.中国矿业大学 环境与测绘学院,江苏 徐州 221116;2.安徽理工大学 测绘学院,安徽 淮南 232001;3.淮南矿业(集团)有限责任公司,安徽 淮南232001;4.安徽理工大学 地球与环境学院,安徽 淮南232001)
地下开采引起的岩层及地表移动是一个复杂的时空过程,岩体及地表移动预测尚难以采用纯理论方法解决,需要利用实测数据确定参数。世界各国在不同矿区建立了大量的地表移动观测站,以根据本矿区实测结果建立相应的预测方法和预测参数体系,指导本矿区的安全生产活动。
在建立地表移动观测站的过程中,涉及连接测量、全面观测、巡视测量、日常观测等阶段的数据采集工作[1],特别是全面观测和日常观测阶段的数据采集工作更为频繁,同时文献[2]对观测程序进行了严格的要求,例如,在地表移动活跃期,观测站的全面观测(平面测量和三等高程测量)和日常观测(主要是四等高程测量)必须在1d内完成。在监测点较多的情况下,采用常规方法就需要组织大量的人力物力来实施。在数据采集环节中,目前还处于常规测量(全站仪导线测量和水准测量)和GPS测量(静态和动态)并存的状态[3-6]。在观测站建立的过程中,随着时间的推移,数据的积累越来越丰富,数据处理和分析的工作量也越来越大。
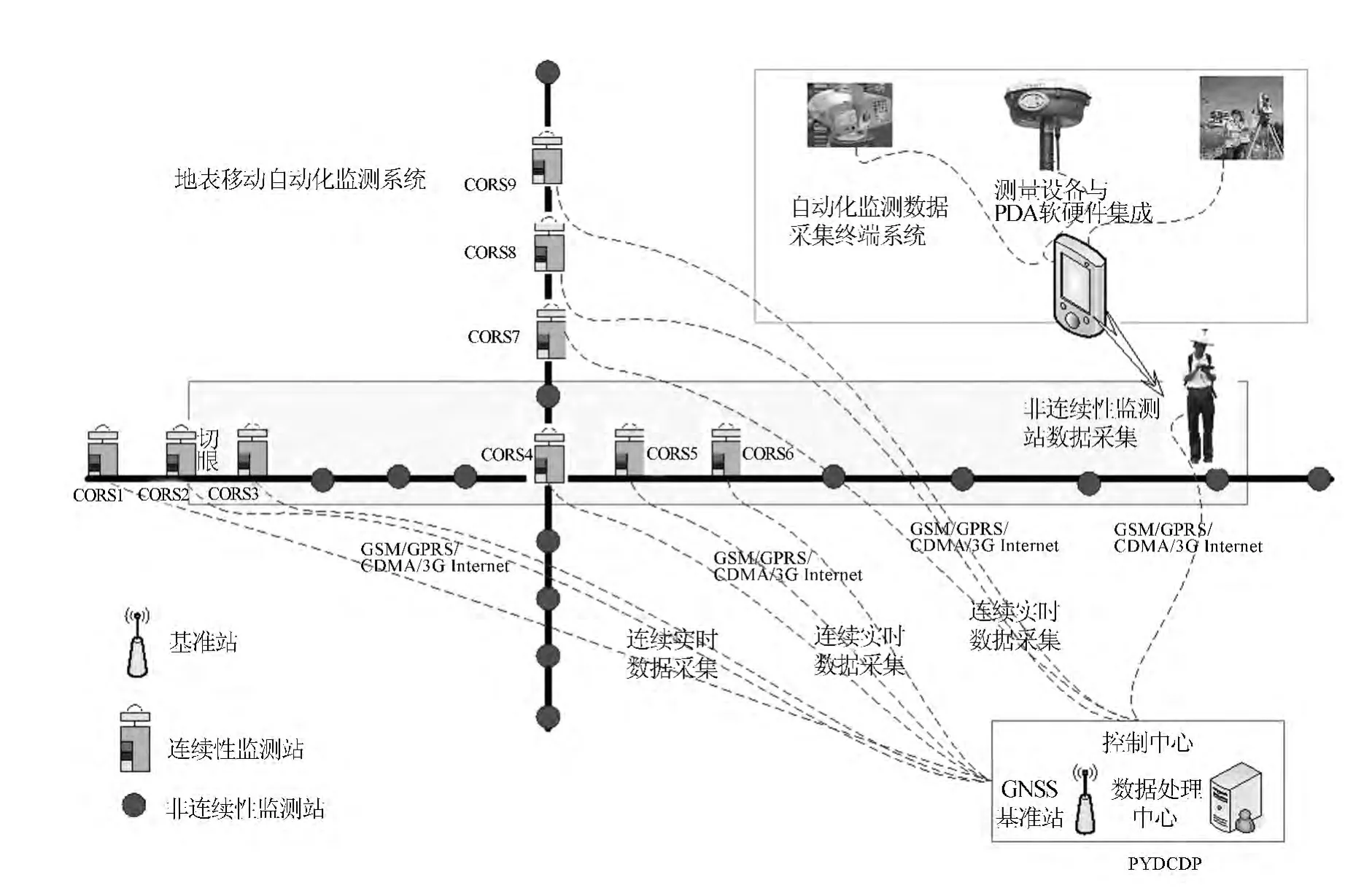
图1 地表移动自动化监测系统基本框架
为恢复与重建矿区生态环境、矿山开采沉陷工程治理提供技术支撑,实现经济发展和生态环境保护协调统一,淮南矿业(集团)有限责任公司委托安徽理工大学和南京科博空间信息科技有限公司(以下简称科博公司)开展“地表移动自动化监测系统研究”。限于篇幅,本文在介绍自动化监测系统组成的基础上,主要对系统的测量精度进行分析。
1 系统组成
“地表移动自动化监测系统研究”以潘一东区1242(1)工作面地表沉陷区为试点研究区,以GNSS CORS技术、GIS技术、计算机网络通讯技术、移动PDA技术、现代测量数据处理技术等为支撑,建立地表移动自动化监测系统;研究自动化监测模式,及时监测由于井下开采导致的地表移动变形,实现监测数据的自动采集、传输、分析,获取地表移动变形参数,为工业广场及各类煤柱留设提供依据,为淮南矿区地表移动观测提供新的监测技术及数据分析模式。
按照地表移动自动化监测系统的建设目标,共布设1个基准站、9个连续实时监测站和约60个非连续实时监测站(地表移动观测站中的监测点)[7]。地表移动自动化监测系统基本框架如图1所示。
基准站(PYDCDP)布设于矿区办公楼顶,提供监测基准及差分数据;9个连续实时监测站(CORS1~CORS9)分别布设于观测线关键部位,采用连续实时监测、定时实时监测模式;非连续实时监测站采用准实时、事后监测模式,也可采用全站仪、数字水准仪的测量模式。地表移动自动化监测系统主要由GNSS基准站子系统、GNSS连续运行监测站子系统、数据监控中心子系统、实时数据采集终端子系统和通讯子系统等组成,以形成一种集设备监控、数据采集、数据传输、数据处理与分析、沉陷预计与预警、开采损害评价的综合地表移动自动化监测系统[8]。
1.1 GNSS基准站子系统
基准站(PYDCDP)布设在工业广场主办公楼楼顶,观测环境很好,采用直径为400mm的不锈钢钢架结构。基准站(及监测站)采用科博公司自主研制的具有多频、多星、多用途的第一代GNSS专用一体机,兼容 BDS、GPS、GLONASS、预留Galileo。该接收机已融合倾斜仪,经扩展还可以与位移、温度、气压、湿度、降雨量等传感器集成,实现GNSS定位信息与传感器采集信息的融合。
1.2 连续运行监测站子系统
根据地表移动监测的需要,将GNSS连续运行监测站布设在地表移动变形特征点上,GNSS接收机以1s采样率连续不断地进行数据采集。
为避免人为破坏,并兼顾今后该区域地表沉降的影响,采用高度不低于6m的水泥电线杆作为观测标志。监测站配备的主要设备有:与基准站相同的GNSS接收机、天线对中盘、避雷针、摄像头、太阳能板、仪器箱、蓄电池、倾斜传感器、测点标志牌等。
为保证电线杆的稳定性,其基础加工为地下1.5m×1.5m×1.5m的基坑,先以混凝土浇注到1.0m处,再放入蓄电池和测斜仪,然后全部用混凝土浇实。
1.3 数据监控中心子系统
数据监控中心子系统是整个地表自动化监测系统的核心部分,与基准站之间依靠信号馈线连接,与监测站通过3G或GPRS无线网络连接。地表自动化监测系统的数据监控中心设在潘一东矿办公楼,主要由服务器、显示器、路由器、防火墙、自动化监测数据处理软件和GIS开采沉陷数据管理软件等组成,通过中国电信2MSDH专线对外发布和接收数据。
数据监控中心配置的主要设备有:HP Z800 X5550服务器1台,三星S22A330BW显示器1台,TP-LINK TL-ER5510G 路 由 器 (内 置 防 火墙)1台。数据监控中心主要由自动化监测系统软件和GIS地表移动变形空间管理分析软件组成,以地表移动监测信息综合数据库为核心,主要功能模块如图2所示。数据监控中心的大部分数据处理和分析工作,如GNSS数据后处理、水准网平差、平面网平差、开采沉陷预计、移动变形计算、移动变形曲线图的绘制、坐标系统转换、开采沉陷损害评价分析等,主要由“矿山开采沉陷综合数据处理与分析系统软件包(简称 MISPAS软件包)”执行[9-11]。

图2 数据监控中心主要功能模块
1.4 实时数据采集终端子系统
实时数据采集终端子系统结合开采沉陷监测的业务特点,研究基于移动GIS的网络RTK(Network RTK,NRTK)在PDA上的应用、终端与数据中心的通讯、移动GIS数据组织、终端和数据中心数据融合等内容,解决当前开采沉陷数据采集技术手段落后、效率低、信息化程度低等问题。在CORS的空间信息框架下,集成CORS和移动GIS的先进技术,为“地表移动自动化监测系统软件”提供一套可靠、实用的实时数据采集终端。系统的硬件主要由PDA、全站仪、数字水准仪、科博GNSS接收机组成。PDA用于加载开采沉陷信息采集系统软件,用于沉陷信息采集、管理、分析以及全站仪和GNSS接收机的智能控制;全站仪、数字水准仪和GNSS接收机用于快速获取监测点的空间信息,其中GNSS接收机具有网络RTK功能。终端系统的主要功能有:
(1)终端软件能够通过无线网络(GPRS、CDMA、3G等)实现与CORS中心、数据处理中心(服务器端)之间的数据通信与传输;数据处理中心可对移动终端的行为进行控制(如终止非法用户进行数据采集等)。
(2)终端软件能够通过蓝牙实现与GNSS接收机、全站仪、数字水准仪之间的数据通信,并且能够将CORS中心的差分数据传输至GNSS接收机实现RTK定位;存储在移动终端的原始导航定位和差分信息可根据用户需要,传输到数据处理中心(服务器)进行进一步处理。
(3)移动终端软件能够实现开采沉陷信息的现场快速采集、录入、编辑、变形分析、制图、预警等工作。
1.5 网络通讯子系统
网络通讯子系统是地表移动自动化监测系统的重要“脉络”,主要实现GNSS连续运行监测站子系统与数据监控中心子系统之间的双向通讯:监测站数据流可实时“流向”数据监控中心,同时可获得来自数据监控中心的指令和差分信息。数据监控中心网络采用潘一东矿内部局域网,并由网络中心协调,通过IP端口映射接入外网。监测站与数据监控中心的通信采用3G或GPRS无线网路,它们之间基于TCP/IP和Ntrip通讯协议。Ntrip由NtripClient、NtripServer和NtripCaster 3个模块组成,其结构如图3所示。其中,Ntrip-Client是用户端软件,用于接收由NtripCaster分发的数据;NtripServer是HTTP客户端软件,用于将数据从数据源传输到NtripCaster;而Ntrip-Caster是HTTP服务器软件,它根据数据源的IP地址、坐标等规则,将NtripServer传输来的数据进行分发,同时提供管理接口。

图3 Ntrip组成结构图
2 精度分析
地表移动自动化监测系统的测量精度是本系统的关键所在,决定了该系统能否满足开采沉陷监测的需要。对于矿山开采沉陷监测,其平面位置采用5″导线进行,高程采用三等(四等)几何水准的方法进行[2]。为保证解算的开采沉陷的关键参数(如边界角、移动角等)的精度,根据推算,要求相邻两期间平面点位相对中误差≤±2cm,最弱点高程中误差≤±1cm。这就要求一次测量的平面点位相对中误差≤±1.4cm,最弱点高程中误差≤±0.7cm。为评价自动化监测系统的测量精度[12],利用2014年3月11日全天观测数据(数据采样率60s),在 WGS-84坐标系下,对9个GNSS连续运行监测站(CORS1~CORS9)的高斯平面坐标X、Y和大地高程H的内符合精度进行统计分析,结果见表1所列。

表1 连续运行监测站内符合精度mm
由表1可知,9个GNSS站X方向的内符合精度在±3.4~±4.8mm,平均为±4.4mm;Y方向的内符合精度在±3.0~±4.7mm,平均为±3.8mm;H方向的内符合精度在 ±8.0~±10.2mm,平均为±8.9mm。从内部符合精度上来说,GNSS连续运行监测站的平面位置测量精度在±4.5~±6.4mm,平均为±5.8mm,完全满足开采沉陷监测的精度要求(一次测量的平面点位相对中误差≤±1.4cm);空间三维位置测量精度在±10.3~±11.7mm 之间,平均为±10.7mm。对于9个连续运行监测站,总体上,其平面位置、高程方向和空间位置的测量精度是一致的,其内部符合精度的中误差分别为±0.6、±0.7、±0.6mm,这说明自动化监测系统中,9个连续运行监测站的监测精度是一致的,均可获得稳定的测量成果。
对于9个连续运行监测站,高程测量精度比平面位置测量精度低1倍,尚未达到开采沉陷监测的精度要求(最弱点高程中误差≤±0.7cm),这与GNSS系统的固有特性有关,也是需进一步解决的问题。
3 结束语
地表移动自动化监测系统研究涉及经典大地测量技术(全站仪导线测量、高精度几何水准测量等)、测绘高新技术(GNSS技术、CORS技术、GIS技术、现代测量数据处理技术)、计算机科学技术(网络通讯技术、软件工程技术)以及地质、采矿等学科的相关知识,研究成果不仅可以解决矿山开采沉陷监测过程中数据采集的瓶颈问题,节约人力资源,还可应用于高层建筑物变形监测,港口、码头、堤防变形监测,山体滑坡变形监测,城市地表沉降和桥梁等的变形监测;同时为研究我国“北斗二代”在矿山沉陷监测领域的应用提供了先期的研究基础。
[1] 何国清,杨 伦,凌赓娣,等.矿山开采沉陷学[M].徐州:中国矿业大学出版社,1991:53-56.
[2] 能源煤总[1989]25号,煤矿测量规程[S].
[3] 余学祥,秦永洋,孙兴平,等.相邻工作面综合地表移动观测站的设计与连接测量[J].大连大学学报,2008,29(6):74-79.
[4] 余学祥,秦永洋,孙兴平,等.顾桥煤矿11-2煤综采面地表移动变形基本特征分析[J].矿山测量,2009(12):8-12.
[5] 余学祥,邓蓉蓉,张美微,等.基于似单差法的井筒沉降监测试验与结果分析[J].合肥工业大学学报:自然科学版,2012,35(6):804-808.
[6] 张敬霞,刘 超,龙仁波,等.矿区高精度GPS地表变形监测体系[J].合肥工业大学学报:自然科学版,2013,36(7):855-860.
[7] 安徽理工大学导航定位技术应用研究所,淮南矿业(集团)有限责任公司.地表移动自动化监测系统研究技术设计[R].淮南:安徽理工大学,2013.
[8] 柯福阳.GNSS网络综合服务关键算法研究与系统开发[D].南京:东南大学,2010.
[9] 吕伟才,秦永洋,孙兴平.基于GIS的矿山开采沉陷综合数据处理软件包的设计[J].矿山测量,2008(4):24-28.
[10] Yu Xuexiang,L¨uWeicai.Development of the coal mine exploiting subsidence integrative softwares for data processing and analyzing[C]//Proc of 2011Conference on Mine Geological Environment Protection,Land Reclamation and Ecological Rehabilitation Technology Exchange Seminar.Scientific Research Publishing,USA,2011:105-109.
[11] 吕伟才,秦永洋,孙兴平,等.矿山开采沉陷预计及制图软件的研制[J].矿山测量,2010(5):58-60.
[12] 安徽理工大学导航定位技术应用研究所,淮南矿业(集团)有限责任公司.地表移动自动化监测系统研究中期研究报告[R].淮南:安徽理工大学,2014.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
一重技术(2021年5期)2022-01-18
铁道通信信号(2020年3期)2020-09-21
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
成都信息工程大学学报(2019年1期)2019-05-20
四川环境(2019年6期)2019-03-04
铁道通信信号(2018年8期)2018-11-10
电子制作(2018年11期)2018-08-04
中国环境监察(2016年8期)2016-10-23
