非线性不确定多时滞切换奇异系统的鲁棒H∞保性能控制
2015-03-11 07:46张立俊杨丽芸刘春菊仇计清鲍冬冬
河北科技大学学报 2015年2期
张立俊,杨丽芸,刘春菊,仇计清,丛 悦,鲍冬冬
(1.河北科技大学理学院,河北石家庄 050018;2.石家庄铁道大学四方学院,河北石家庄050228)
切换系统是一类特殊的混杂系统,它是由若干子系统和描述它们之间联系的切换规则组成。根据恰当的切换规则可以使系统获得较好的性能,例如,2个不稳定的子系统可以通过适当的切换规则使得系统渐进稳定[1]。因为实际系统本身就包含了时滞和不确定性,而这些时滞和不确定性是造成系统不稳定的主要原因[2]。因此,人们对不确定时滞系统进行了广泛的研究[3-6]。在控制这一类系统的时候,人们希望既可以确保系统的稳定性,又可以获得一定的鲁棒性能。在这种研究背景下,文献[7]提出了保性能控制的思想,即设计一个控制器,使得该闭环系统对所有的不确定性,既保持鲁棒稳定性,又保证其给定的性能指标小于某一上界。对于保性能控制问题已经取得了丰富的研究成果[8-11]。文献[12]为了给不确定时滞系统设计鲁棒保性能控制器,提出了利用Riccati方程的方法。而文献[13]将最优保性能控制器的设计归结为具有LMIs约束的凸优化问题。
近几十年来,奇异系统已经被广泛地扩展到电力、经济等系统中,因为应用奇异模型描述问题来比其他系统模型更直接。因此,许多建立在奇异系统基础上的其他系统也得到了广泛的应用[14-16],如基于线性矩阵不等式的奇异系统的鲁棒稳定性控制[17],不确定时滞离散奇异系统的鲁棒H∞控制[18]等。但目前研究的切换奇异系统以不确定单时滞系统居多,而关于多时滞的研究尚不多见。本文研究了非线性不确定多时滞切换奇异系统的鲁棒H∞保性能控制问题。首先,定义鲁棒H∞保性能控制的定义;然后应用线性矩阵不等式LMIs的方法,根据相应的切换规则,设计鲁棒H∞保性能控制器,使得闭环系统符合鲁棒H∞保性能控制的定义,最后通过一个数值算例和仿真验证此方法的有效性。
1 问题描述和准备知识
考虑如下非线性不确定多时滞切换奇异系统:

其中:x(t)∈Rn,u(t)∈Rm,z(t)∈Rq和 ω(t)∈L2[0,+∞)分别表示状态,控制输入,被控输出和扰动输入向量,g(x(t))表示非线性干扰,且满足‖g(x(t))‖≤‖Mx(t)‖;φ(t)表示[-ξ,0]上连续的初始状态,h,d表示正的时滞常数,E∈Rn×n表示奇异矩阵,且满足 rank E=r<n;δ(·):[0,+ ∞)→{1,2,…,n}def=表示分段常值切换信号,且 σ(t)=i表示第i个子系统在t时刻被激活。假设 Ai,Adi,B1i,B2i,Ci,Di,Gi,M表示系统具有适当维数的常矩阵,ΔAi,ΔAdi表示描述参数不确定性的不变矩阵,且具有如下形式:

其中Mi,Hi,Hdi(i∈)表示给定的具有相应维数的常矩阵。Fi(t)表示不确定矩阵,且满足(t)Fi(t)≤I。
定义1 考虑系统(1)的自由系统如下:

1)对每一个i∈M,存在s∈C,使得det(sE-Ai-Adi)≠0,则称切换奇异系统(3)是正则的;
2)如果系统(3)是正则的,对所有s∈C,均满足deg(det(sE -Ai-Adi))=rank E,i∈M,deg(p(s))表示多项式p(s)的次数,则称切换奇异系统(3)是无脉冲的。
注1:文中所研究的切换奇异系统均是正则和无脉冲的。证明过程可以参见文献[17]。
注2:M表示一个有限的整数范围,C表示全体实数。
为了方便对问题的研究,x(t),x(t-d),x(t-h),ω(t),g(x(t))分别被记为 x,xd,xh,ω,g,且
系统(1)在状态反馈控制器uδ(t)(t)=Kδ(t)x(t)作用下的闭环系统为

引入性能指标:

其中Q和R是给定的正定加权矩阵。
定义2 对于系统(1)和给定的常数γ>0,设计切换规则σ(t),如果对于所有的参数和性能指标(5),使得到的闭环奇异切换系统(4)满足:
1)当ω(t)≡0时,闭环奇异切换系统(4)的零解是渐近稳定的;
2)当 φ (t)=0 时,对任意非零向量 ω (t)∈L2[0,+∞),满足 ‖z‖[0,+∞)<γ2‖ω‖[0,+∞)成立;
3)存在性能指标的一个上界J*>0,使得闭环系统(4)是渐进稳定的,且满足J≤J*。则称状态反馈控制律uδ(t)为系统(1)的鲁棒H∞保性能控制律。
引理1[14](schur补引理)若已知3个矩阵和Ω1,Ω2和Ω3,则<0,当且仅当

引理2[15]对于任意给定的适当维数的矩阵X,Y和任意标量α>0,有:

引理3[16]对于适当维数的矩阵Y,M,H,则Y+MFH+HTFTMT<0,对于所有满足FTF≤I的矩阵成立,当且仅当存在标量ε>0,有:

2 主要结果
定理1 对于给定的常数γ>0,λ>0和性能指标(5),若存在可逆对称矩阵P∈Rn×n,矩阵Ki及对称正定矩阵 Q1,Q2,n个满足的实数αi,使得如下矩阵不等式成立:
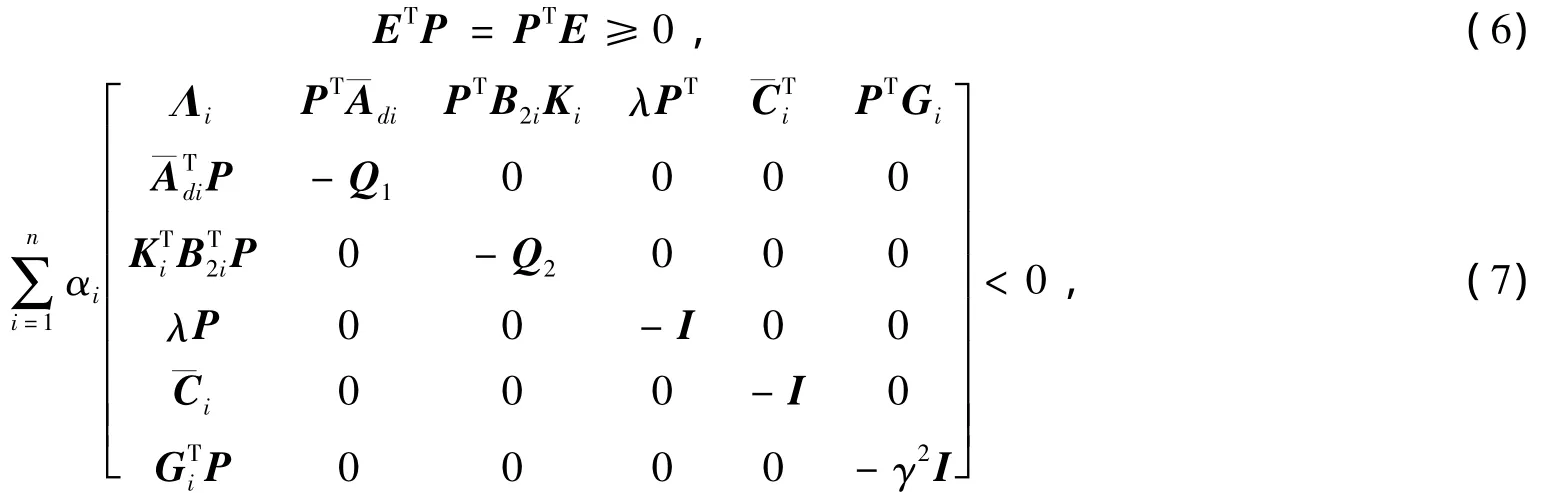
则系统(1)是具有鲁棒H∞干扰抑制水平γ状态反馈可切换正定的。其中=Kix(t)是系统(1)的一个鲁棒H∞保性能控制律,且相应的性能指标满足:

选取的切换规则为

证明 由引理1,不等式(7)等价于

即对于∀x∈Rn/{0},有:


假设{(tk,ik),0=t0≤t1≤…}是由切换规则(9)在区间[0,+∞)上生成的切换序列,其中(tk,ik)表示当tk≤t≤tk+1第ik个子系统被激活且在tk+1时离开。对闭环系统(4)构造Lyapunov函数V(xt),使得对任意非零状态x,V(xt)是正定的。令

V(xt)沿闭环系统(4)对t求导,可得:

首先证明当ω(t)=0时,闭环系统(4)在切换规则(9)下的零解是渐进稳定的。
当ω(t)=0时,


结合式(7)和式(12)可得:

由Lyapunov稳定性理论,闭环系统(4)在切换规则(9)下的零解是渐进稳定的。
下面证明闭环系统(4)满足给定的H∞性能指标。
由引理2知:

对于任意的ω(t)∈L2[0,+∞),结合式(14)和式(16),可得:

其中:

故,

当φ(t)=0时,式(17)两边分别从0~+∞ 对t积分,可得:

故,对于任意的 ω (t)∈L2[0,+∞),有‖z‖[0,+∞)<γ2‖ω‖[0,+∞)。
将式(15)两边分别对tk从0~+∞ 取积分,可得:


由此定理得证。
定理2 满足定理1条件,式(6)与式(7)的充要条件为对于任意给定的正实数γ>0,常数λ>0,若存在 非 奇异可逆矩阵 S ∈Rn×n,ε>0,及对阵正定矩阵 Ki,X,Y,常数 ε>0,n个满足 αi>0,i∈,且的实数αi,使得如下矩阵不等式成立:


此时,

证明 根据定理1只需要证明式(6)和式(7)分别与式(20)和式(21)等价即可。
在式(7)中,分别用Ai+ΔAi(t)=Ai+MiFi(t)Hi,Adi+ΔAdi(t)=Adi+MiFi(t)Hdi,Ci+DiKi代替,可以得到下面的式子:

由引理3,式(22)成立时,当且仅当

成立。
对式(23)应用引理1,并且左乘 d iag{P-1,I,I,I,I,I,I,I,I,I}T右乘 d iag{I,I,I,I,I,I},并令 P-1=Ti,则可推导出式(21)与式(7)等价。
另外,令P-1=X,容易得出式(20)与式(6)等价。故定理2得证。
定理3 对于系统(1)和性能指标(5),对于给定的常数γ>0,λ >0,如果存在可逆矩阵S∈Rn×n,ε>0,β>0,及对阵正定矩阵 X ,Y,N1,N2,n个满足 αi>0,i∈,且的实数αi,使得以下凸优化问题有最优解

证明 由定理2知,若式(21)成立,则Uδ(t)(t)=Kδ(t)x(t)=Tδ(t)P为系统(4)的鲁棒H∞保性能控制器,性能指标上界由式(19)确定。
式(24)中的2)等价于 φT(0)S-1φ(0)<β,
式(24)中的3)等价于UTX-1U<N1,且tr{UTX-1U}<tr{N1},
式(24)中的4)等价于UTY-1U<N2,且tr{UTY-1U}<tr{N2}。
3 数值举例
考虑如下非线性不确定多时滞切换奇异系统(1)的参数如下:

选取 γ =1,λ = 0.3,ξ=1,性能指标的对称加权矩阵为初始条件为
通过应用LMIs工具箱中的mincx,得到:

利用这个可行解构造出该系统的最优鲁棒H∞保性能控制器:

相应的性能指标J*=23.905 5。
4 结语
本文针对一类非线性不确定多时滞切换奇异系统,研究了该系统的鲁棒H∞保性能控制问题。主要目的是给出鲁棒H∞保性能控制器,该控制器不仅使得闭环系统是渐进稳定的,而且相应的性能指标不得超过某个规定的上界。基于Lyapunov函数和线性矩阵不等式,得到闭环系统渐进稳定的充分条件并设计鲁棒H∞控制器。最后通过数值举例证明了所用方法的有效性。
/References:
[1] LIBERZON D,MORSE A S.Basic problems in stability and design ofswitched systems[J].IEEEControl SystemsMagazine,1999,19(5):59-70.
[2] 宋正一,赵军.不确定时滞线性离散切换系统的鲁棒H∞控制[J].自动化学报,2006,32(5):760-766.SONG Zhengyi,ZHAO Jun.RobustH∞control for linear deiscrete-time switched systemswith norm-bounded uncertainties and time-delay[J].Acta Automatica Sinica,2006,32(5):760-766.
[3] 王刻奇,杨智.不确定离散时滞系统的时滞相关保性能控制[J].信息与控制,2010,39(3):373-378.WANG Keqi,YANG Zhi.Delay-dependent guaranteed cost control of uncertain discrete time-delay system[J].Information and Control,2010,39(3):373-378.
[4] CHENWuhua,GUAN Zhihong,LU Xiaomei.Delay-dependent guaranteed cost control for uncertain discrete-time systemswith both state and input delays[J].Journal of The Franklin Institute,2004,341(5):419-430.
[5] 邱占芝,张庆灵,刘明.不确定时延输出反馈网络化系统保性能控制[J].控制理论与应用,2007,24(2):274-278.QIU Zhanzhi,ZHANG Qingling,LIUMing.Guaranteed performance control for output feedback networked control systemswith uncertain time-delay[J].Control Theory & Applications,2007,24(2):274-278.
[6] 孙晓岭,杨丽芸,鲍冬冬,等.时滞网络化控制系统的鲁棒H∞稳定性分析[J].河北科技大学学报,2013,34(4):297-301.SUN Xiaoling,YANG Liyun,BAODongdong,et al.Analysis of robustH∞stability for time delay network control system[J].Journal of Hebei University of Science and Technology,2013,34(4):297-301.
[7] SHEKDIN SL,PENG T K C.Adaptive guaranteed cost control of systemswith uncertain parameters[J].IEEE Transactionson Automatic Control,1972,17(4):474-483.
[8] YONEYAMA J.Robust stabilization for uncertain time-delay systems under time-varying sampling [J].Applied Mathematical Sciences,2009,38(3):1873-1883.
[9] JIA Huimei,XIANG Zhengrong,KARIMIH R.Robust reliable passive control of uncertain stochastic switched time-delay systems[J].Applied Mathematics and Computation,2014,231:254-267.
[10] DU Zhaoping,ZHANGQinglin.Delay-dependent robustcontrol for uncertain singular systemswithmultiple state delays[J].IETControl Theory Application,2009,3(6):731-740.
[11] 何召兰,高岑,武俊峰.不确定时滞切换奇异系统的鲁棒H∞控制[J].北京化工大学学报(自然科学版),2012,39(1):89-92.HE Zhaolan,GAO Cen,WU Junfeng.RobustH∞control for uncertain time-delay switched singular systems[J].Journal of Beijing University of Chemical Technology(Natural Science),2012,39(1):89-92.
[12] MAHMOUD M S,XIE L.Guaranteed cost control of uncertain discrete systemswith delay[J].International Journal of Control,2000,73(2),105-114.
[13] 杨坤,沈艳霞,纪志成.不确定时变时滞切换奇异切换广义系统的鲁棒H∞保性能控制[J].控制决策,2013,28(5):787-796.YANG Kun,SHEN Yanxia,JIZhicheng.RobustH∞guaranteed cost control for uncertain switched singular systems with time-varying delay[J].Control and Decision,2013,28(5):787-796.
[14] YUE D,HAN Q L.Delay-dependent exponential stability of stochastic systems with time-varying delay nonlinearity and markovian switching[J].IEEE Transactions on Automatic Control,2005,50(2):217-222.
[15] SU H,WANG X Z.Flocking formulti-agents with a virtual leader[J].IEEE Transctions on Automatic Control,2009,54(2):293-307.
[16] XU Shengyuan,SHIPeng,CHU Yuming,et al.Robust stochastic stabilization andH∞control of uncertain neutral stochastic time-delay systems[J].Journal of Mathematical Analusis and Applications,2006,314(1):1-16.
[17] WU Zhengguang,ZHOUWuneng.Delay-dependent robust stabilization for uncertain singular systemswith state delay[J].Acta Automatica Sinica,2007,33(7):714-718.
[18] FANG Mei.Delay-dependent robustH∞control for uncertain singular systemswith state delay[J].Acta Automatica Sinica,2009,35(1):65-70.
猜你喜欢
新高考·高三数学(2022年3期)2022-04-28
石油沥青(2021年1期)2021-04-13
空间科学学报(2020年4期)2020-04-22
北京航空航天大学学报(2019年9期)2019-10-26
自动化学报(2019年6期)2019-07-23
中文信息(2017年12期)2018-01-27
自动化学报(2017年4期)2017-06-15
考试周刊(2017年7期)2017-02-06
制冷技术(2016年4期)2016-08-21
中央民族大学学报(自然科学版)(2015年2期)2015-06-09