一种雷达阵地优化的新方法
2015-03-10 04:03:22王中杰刘海军
现代雷达 2015年9期
王中杰,刘海军,黄 炜
(南京电子技术研究所, 南京 210039)
·信号/数据处理·
一种雷达阵地优化的新方法
王中杰,刘海军,黄 炜
(南京电子技术研究所, 南京 210039)
由于雷达所处的阵地环境各种各样,很容易造成测量高度出现误差,现代雷达要提高不同阵地环境下测高精度。文中分析了测高原理,研究了引起测高误差的因素。根据情报类雷达工作特点,提出利用修正补偿数据方法解决不同阵地环境下测高误差问题,建立了实用的数学模型,给出了准确的算法,并应用于不同阵地的雷达。实践结果表明:应用该方法大大提高了雷达测高的准确度,更加精确获得空中情报信息,且具有通用性,操作简单方便,易掌握。
阵地优化;测高;补偿数据
0 引 言
现代雷达不仅要解决“看得见”的问题,还要解决“看得准”的问题。“看得准”指的是目标参数估计或目标参数提取准确。目标参数包括目标的距离、方位、高度和速度等。其中,目标高度是雷达观测的一项重要指标,日益引起我军重视。于是,针对提高雷达测高精度的阵地优化措施也更多地被提及[1-3]。
对于固定体制的雷达,提高测高精度,一般方法是提高雷达水平精度,提高通道幅相一致性(针对多通道雷达),但这些方法只适用于较好阵地条件下的测高需求。由于雷达工作性质,常会架设在有障碍物地区,由于折射或多路径效应引起的测高误差,不能用上述方法解决[4]。针对实际地形,利用“补偿数据”的方法,可以有针对性的对雷达测高进行灵活修正。
1 测高原理
测量雷达目标高度的关键是计算目标的俯仰角。如果这个角度已知,则目标的高度可以用下面的公式算出
Ht=Rsinθt+Ha+R2/2kr
(1)
式中:Ht为目标高度;R为从雷达到目标的距离;θt为目标的俯仰角;Ha为雷达天线架设高度;r为地球曲率半径;k为大气标准折射系数,kr的值大约等于8 496 km[5-6]。测高示意图如图1所示。

图1 雷达测高示意图
多波束一维相扫雷达在垂直面上有多个接收波束,相邻两个波束有一定的重叠,对应每个波束有一路接收机,各路接收机的增益是一致的[7]。
2 补偿数据原理
雷达在使用前,要进行水平标校,作为雷达观测目标的基准。在相对于雷达的特殊方位,如有山头、树木
等,会严重引起雷达测高误差。这种误差,一般是系统性的,相对稳定。可以在有先验测高误差的情况下,建立一组测高补偿数据,来修正由阵地环境引起的固定方位的测高误差[8-10]。
测高,本质是测得目标相对于雷达的仰角,因此,补偿仰角数据能直接把修正值带入到雷达测高系统,实现起来简单、方便。建立一个仰角补偿数据文件,每一个补偿数据对应明确的方位。在没有先验测高误差情况下,所有数据置零(或者根据雷达自身工作性质和体制,进行数据初始化)。当雷达工作后,收集所有观测方位目标的测高信息,进行系统分析。如果某特殊方位出现系统性测高偏差,并且这种偏差不随时间变化而改变,即可以用补偿仰角数据的方法进行修正。
3 案例
方位360°机械扫描、俯仰电子扫描的某空中情报雷达,在90°~150°方位上观测到一次雷达比二次雷达目标普遍偏低,其中在方位为120°偏差最大,距离200km~300km内偏低1 000m左右,其他方位测高正常。观察地形图,在此方位内十几千米处有山,略高于雷达阵地。
3.1 建立补偿数据文件
建立一个全方位的补偿数据文件,每2°设置一个补偿数据,共180个数据。由于此型雷达天线方位上机械扫描,在旋转过程中,天线阵面俯仰会产生一个结构性变化,这种变化是由天线重心不在旋转轴上造成的。其俯仰角度值如图2所示,横坐标为补偿数据序号,纵坐标为天线阵面俯仰角度值,以分为单位。雷达在数据处理中引用了此文件进行测高计算,因此,修改此文件即可以进行测高的修正。

图2 修改前的横向数据
3.2 修改补偿数据文件
(1)确定90°~150°方位范围对应的补偿数据,是第45~75个数据。
(2)确定补偿数据修正值大小。
以第60个数据为中心,修改这31个调平数据。第60个数据在原来基础上加14(称为β60,关于修改值的大小,后面会介绍),从这个数据开始往正负方向加的数据依次减小,逐渐减小到0,即β45=β75=0。使调平数据呈现图3的趋势。

图3 修改后的横向数据
下面再来说明修改数据的大小,即β值的确定。
由于数据修改是在原来测高数据分析基础上进行,为计算简单,可以忽略地球曲率,把大地坐标看作平面(误差不大于5%,满足此型雷达对测高误差的要求)。图4中O为雷达位置,C为目标真实位置,B为横向数据修改前雷达观测到目标位置,A为目标在水平地面投影,D为目标水平距离,H为雷达观测到目标的高度,h为高度差。需要确定的是图中h。三角形OBC为钝角三角形,但在D≫H时,角OBC非常接近直角,R≈D,我们用D代替R,把三角形OBC看成直角三角形,这样计算结果误差远远小于雷达测高允许的误差(误差不大于2%,满足此型雷达对测高误差的要求)。如果D=250 km,H=8,h=1,则β=arctan(h/R)=0.229°=13.7′。这就是需要修改的横向数据的值。

图4 雷达与目标相对位置简图
3.3 修改后的测高
利用上述方法对一条航线进行了补偿数据修正。结果显示,修正后,测高误差的均方根从580m下降到158m,误差均方根减小了73%,如图5所示。解决了特殊环境下测高不准的难题。
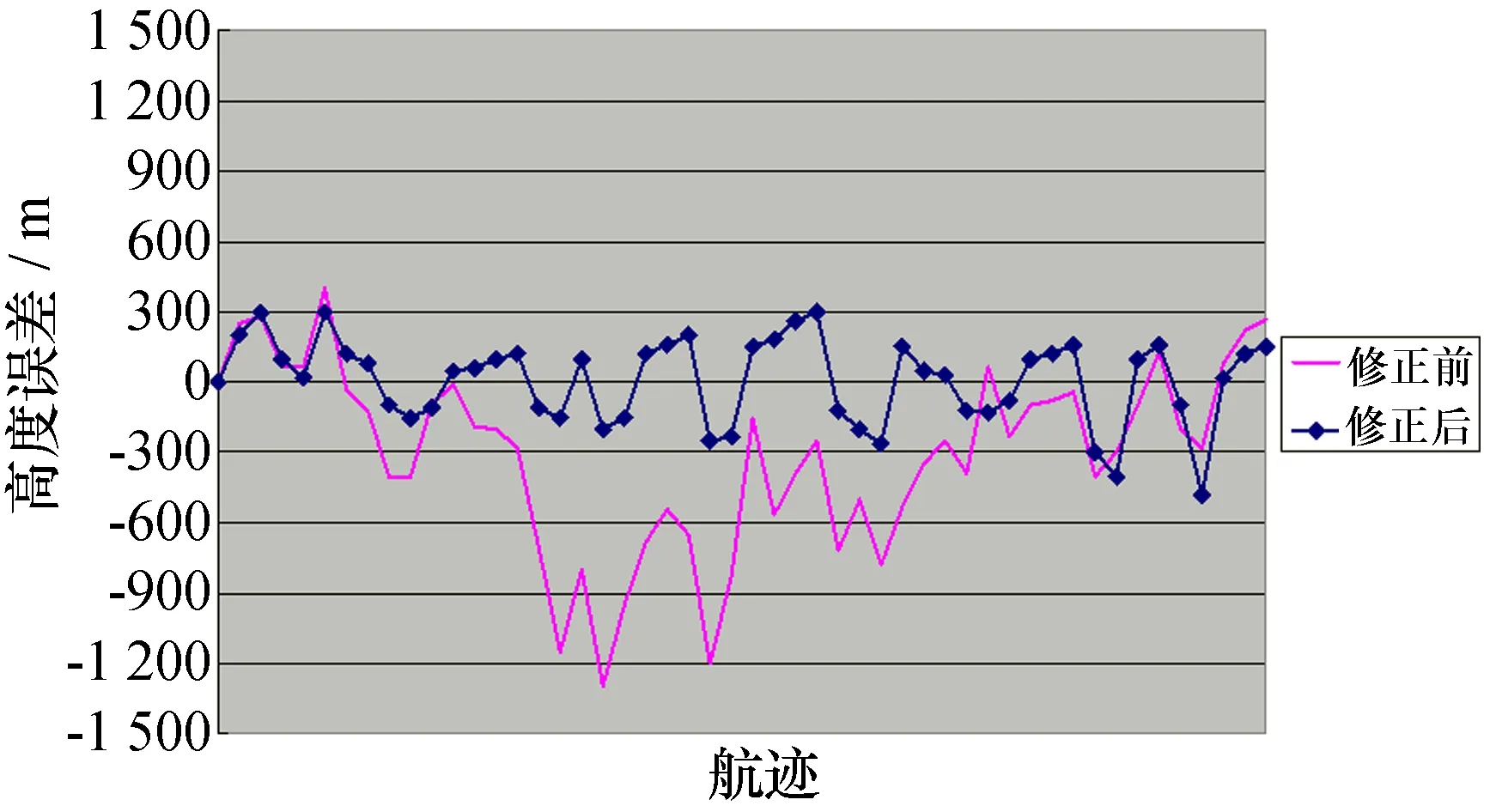
图5 修正前后测高误差图
3.4 关于补偿数据修正值的正负
由于补偿数据代表的是天线阵面的俯仰值,因此,如果测高偏低,修正数据应为正值;反之,如果测高偏高,修正数据则为负值。
4 结束语
本文紧贴一线雷达使用实际情况,详细分析了在特殊阵地条件下,由于阵地环境影响测高误差的表现,提出了通过建立修正补偿数据解决测高误差问题的方法,并给出了详细的算法。这种方法在此前文章中未曾发现。此方法不需要增加任何硬件成本,只需在软件算法上稍加改进,即可完成。此方法已应用于多套雷达,均取得很好的效果。
[1] 张祖稷,金 林,束咸荣. 雷达天线技术[M]. 北京:电子工业出版社,2005.ZhangZuji,JinLin,ShuXianrong.Radarantennastechnology[M].Beijing:PublishHouseofElectronicsIndustry, 2005.
[2] 张光义. 相控阵雷达系统[M]. 北京: 国防工业出版社,2006.ZhangGuangyi.Phasedarrayradarsystem[M].Beijing:NationalDefenseIndustryPress, 2006.
[3]AmitayN,GalindoV,WuCP. 相控阵天线理论与分析[M]. 陆 雷, 译. 北京:国防工业出版社,1978.AmitayN,GalindoV,WuCP.Theoryandanalysisofphasedarrayantenna[M].LuLei,trans.Beijing:NationalDefenseIndustryPress, 1978.
[4]MunkBA,KornbandTW,FulonRD.Scanindependentphasedarrays[J].RadioScience, 1979(14): 979-990.
[5]SkolikMI. 雷达手册[M]. 2版. 北京:电子工业出版社,2005.SkolikMI.Radarhandbook[M]. 2nded.Beijing:PublishingHouseofElectronicsIndustry, 2005.
[6]SkolnikM.Introductiontoradarsystems[M].NewYork:McGraw-Hill, 1980.
[7] 邵余峰. 高机动三坐标雷达比幅测高误差分析及修正[J]. 现代雷达, 2007, 29(4): 79-81.ShaoYufeng.Erroranalysisandcorrectionofamplitude-comparisonforhighmobility3Dradar[J].ModernRadar, 2007, 29(4): 79-81.
[8] 李可心,夏洪森. 基于Grubbs的雷达精度检测数据分析[J]. 现代雷达, 2008, 30(10): 26-29.LiKexin,XiaHongsen.DataanalysisofradaraccuracytestingbasedonGrubbs[J].ModernRadar, 2008, 30(10): 26-29.
[9] 左振宇,马艳琴. 一种雷达组网探测系统目标威胁评估技术[J]. 现代雷达, 2009, 31(8): 13-16.ZuoZhenyu,MaYanqin.Atargetthreatevaluationtechnologyformulti-radarnettedsystems[J].ModernRadar, 2009, 31(8): 13-16.
[10] 张 善, 李银萍. 一种防空系统目标威胁评估方法[J]. 现代雷达, 2010, 32(9): 6-9.ZhangShan,LiYinping.Methodoftargetthreatevaluationforairdefensesystem[J].ModernRadar, 2010, 32(9): 6-9.
王中杰 男,1980年生,硕士,工程师。研究方向为雷达系统集成。
刘海军 男,1982年生,工程师。研究方向为雷达系统集成。
黄 炜 男,1977年生,高级工程师。研究方向为雷达系统集成和工程化设计。
A New Method of Radar Position Optimization
WANG Zhongjie,LIU Haijun,HUANG Wei
(Nanjing Research Institute of Electronics Technology, Nanjing 210039, China)
The height measured by radar is different under the different positional condition. Modern radar neads to improve the height measurement accuracy. The principle that how the height is measured and various factors which can cause the height error is analysed. According to working characteristic of intelligence radar,the method of revising compensating data is first raised to resolve measurement error under the different positional condition by practical mathematics model and precise algorithm. The practice shows that the measuring accuracy is greatly enhanced and intelligence information gotten from the air is more accurate by this method, which is universal and simple to handle.
position optimization; height measurement; revise data
10.16592/ j.cnki.1004-7859.2015.09.006
王中杰 Email:83639537@qq.com
2015-04-22
2015-07-18
TN
A
1004-7859(2015)09-0026-03
猜你喜欢
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
幼儿园(2021年12期)2021-11-06 05:10:20
作文小学高年级(2021年6期)2021-07-05 01:50:28
少先队活动(2020年8期)2020-09-11 06:42:14
少先队活动(2020年7期)2020-08-14 01:17:36
法律方法(2019年4期)2019-11-16 01:07:28
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17