
微型星敏感器镜头参数优化*
2015-03-10 10:34:06马铁英
航天控制 2015年5期
杨 森 蒙 涛 马铁英
1.中国计量学院光学与电子科技学院,杭州310018
2.浙江大学微小卫星研究中心,杭州310027
星敏感器是空间飞行器中广泛使用的一种高精密空间姿态测量仪器,它通过探测天体中不同位置的恒星来获取运载体三轴姿态信息[1-2]。星敏感器提供的姿态信息的精度能达到角秒量级,因而成为导弹和航天器等空间姿态测量的首选设备。随着微小卫星技术的发展,老一代星敏感器因其体积大、质量重的特点不能满足新的要求,迫切需要研发新一代微型星敏感器。
星敏感器的探测灵敏度、探测视场的大小与星敏感器镜头的各项参数紧密相关。在图像传感器确定的情况下,镜头的焦距越小,有效通光口径越大,星敏感器探测到的恒星数目越多。王晓东[3]、李杰[4]和刘金国[5]等推导了星等探测灵敏度数学评估模型,分析了影响探测能力的因素,为APS星敏感器的研究打下基础。但实例分析中提供的参数不够详细,也没有进行试验验证。本文建立并优化了星等探测灵敏度模型,对星敏感器的镜头参数进行了分析,优化了镜头参数并进行了实验验证,旨在探索在图像传感器确定的条件下,通过优化镜头参数,使镜头选取微型化。
目前,世界上最小的星敏感器是由德国的柏林空间技术股份有限公司(Berlin Space Technologies GmbH,BST)在2011年研制的代号为ST-200的微型星敏感器,其尺寸仅为30 mm×30 mm×38.1 mm。国内研究与世界先进水平相比,还有很大差距。国内最小的星敏感器是由中科院光学精密机械研究所和佛山科学技术学院等研究机构共同设计的,其尺寸为80 mm×60 mm×110 mm。浙江大学[6]采用本文优化的镜头后,星敏感器的尺寸为73 mm×30 mm×95 mm,是国内研制的最小星敏感器。
1 星等探测灵敏度模型建模
星等探测灵敏度是指光电系统正确地获取目标恒星信息的能力大小。对星敏感器而言,探测灵敏度决定了星敏感器能否探测到恒星发出的光,是其有效工作的前提。由于恒星亮度较弱,因此星敏感器要求具有较高的探测灵敏度。分析星敏感器的探测能力,首先要分析星敏感器所能接收和利用的星光信号能量。
1.1 星光信号能量
星等M是描述星体灰度的量值。由于星体发光的光谱范围不同,所以星等的定义还和接受器件的光谱响应有密切关系。当人眼做接受器件时,定义的星等称为视星等Mv。
星光信号是星敏感器系统的输入信号,其能量大小直接关系到它能否被星敏感器探测到。通常可以把恒星当作黑体辐射来讨论星光信号能量问题,对于Mv=0的恒星,其辐射照度E0=2.96·10-14W/mm2,则Ms星等的恒星辐射照度表达式为:

星敏感器中CMOS图像传感器焦平面接收到的星光辐射通量为:

其中,Zo为光学系统透过率,Em为星光强度,D为星敏感器光学系统有效孔径。
CMOS图像传感器焦平面在曝光时间T内接收到的星光信号光子数为:


同样,可以把星空背景辐射看作是一定星等的光辐射信号,求出背景辐射产生的电荷数B,如果系统总的输出噪声等效电荷数为N,则星敏感器输出等效电荷为:

1.2 星等探测信噪比估算
CMOS图像传感器噪声源包括以下几点[5]:1)暗电流噪声nDC;2)光子散粒噪声nPS;3)非均匀性噪声nNUN;4)固定模式噪声nFPN;5)热噪声和1/f噪声;6)复位噪声nreset;7)读出噪声nRN。
考虑前述CMOS图像传感器的各个噪声源,CMOS图像传感器的噪声模型可表示为:

考虑系统采用双采样电路可以抑制1/f噪声和复位噪声,并且光子的散粒噪声可由信号的电子数表示,非均匀性噪声由暗电流非均匀性噪声和光子响应非均匀性噪声组成,则上式可表示为:
其中,S表示信号电子数,即S=NS;B为背景辐射产生的光电子数。
APS星光信号的信噪比表示为:

1.3 信噪比判据
信噪比是光电系统噪声受限情况下检测目标能力的常用判据[3]。早期关于系统探测能力的分析中,经常以作用距离的概念出现,对于无穷远的发光体而言,采用作用距离的概念显然是不合适的,因而转化为目标信号强度所对应的信噪比来衡量。从噪声环境中检测信号存在2种情况:1)有效地提取目标信号,其可能性大小称为探测率;2)将无目标样值判为有目标的概率,称为虚警率。
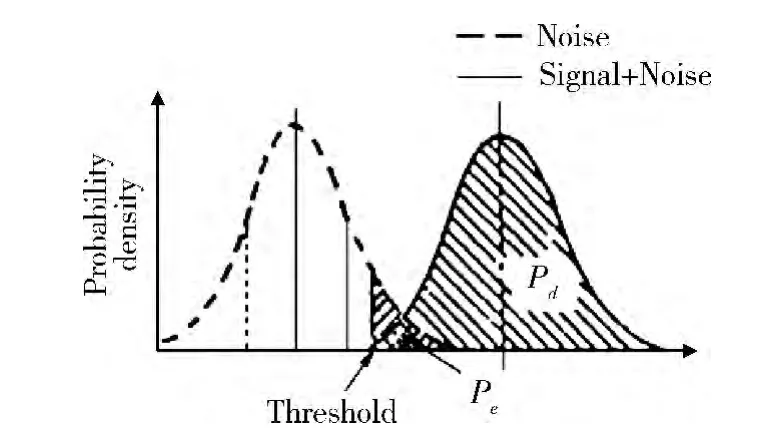
图1 探测率、虚警值与信噪比阈值
白噪声中脉冲信号检测时的探测率和虚警值分布如图1所示。其中,虚线是噪声的概率密度分布,实线是信号与噪声叠加后的概率密度分布。当取不同幅度的门限(对应不同信噪比)作为判定有无目标的准则时,其虚警几率(图中网格部分)和探测几率(图中斜线部分)相应发生变化。对于星敏感器而言,对恒星目标实现有效探测,满足以下判据:

其中,S为信号光电子数;N为噪声均方根值;Vth为满足一定探测率和虚警率的信噪比阈值。当要求探测率大于99%,虚警率小于1%时,可求得信噪比阈值Vth为5;当探测率大于99.9%,虚警率小于0.1%时,可求得信噪比阈值Vth为8.1。
1.4 星等探测灵敏度模型
根据信噪比判据[3],由式(9)和(10)可得

其中,mS为星目标的视星等;mB为背景辐射等效视星等;d为光斑直径。背景噪声B的值很小,在计算时一般可忽略。由式(12)和(13)可得系统星等探测灵敏度的数学评估模型为

由式(15)可知:光学透过率高,光学孔径大,像元尺寸大,星点像光斑能量集中,积分时间长,量子效率高,填充因子高,背景辐射与CMOS噪声小,则系统的星等探测灵敏度高。同时,探测阈值也直接影响着星等探测灵敏度。
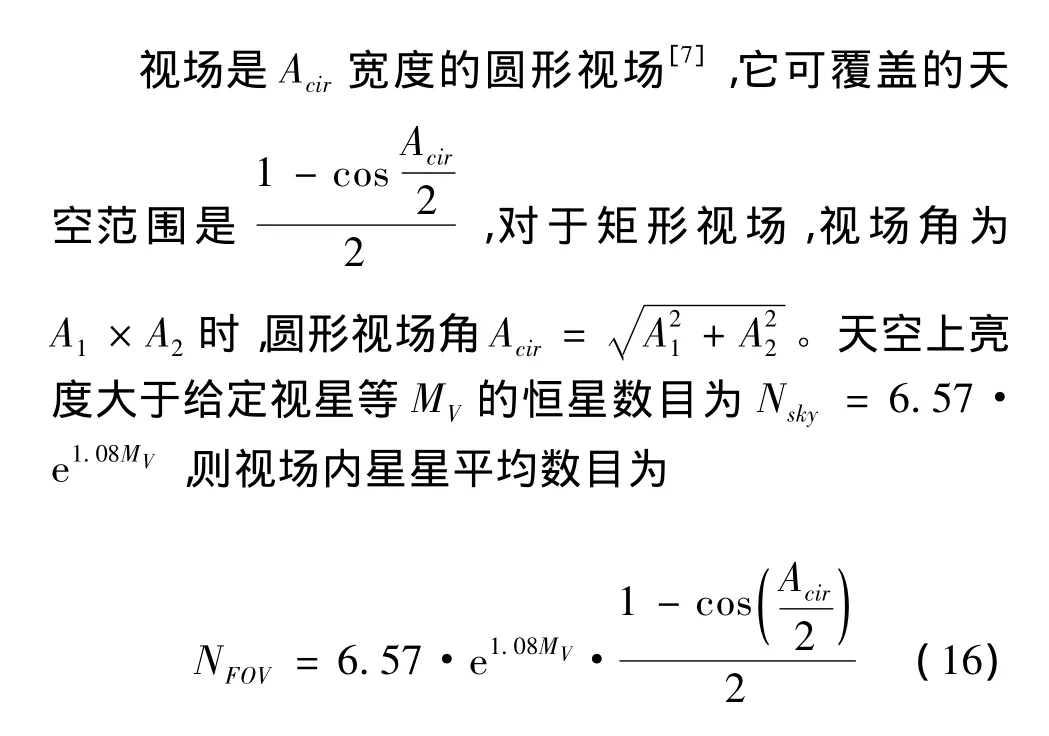
2 可探测恒星数
3 星敏感器镜头参数分析
星敏感器光学系统设计指标[8]是由所选用的探测器芯片的光谱相应范围、几何尺寸、所需探测的极限星等和极限星等的光谱分布及制冷安装要求等诸多因素决定的。包括系统结构形式、视场、焦距、相对孔径、光谱范围、中心波长、弥散圆尺寸、系统透过率、后工作距离及工作温度等。
在探测元件和视频处理电路的性能确定以后,星敏感器所能探测到的极限星等主要取决于光学系统的通光孔径。由于像点的像面照度与孔径的平方成正比,因此孔径越大,敏感器的星等灵敏度越高。但孔径的加大,光学系统的像差迅速增大。为了获得必须的成像质量,必须对孔径加以限制,即同光学系统的焦距保持一定关系。这个关系用F数来表示。F数越小,光学系统的孔径越大,焦距越小,敏感器的灵敏度越高,但设计难度随之加大。因此,为星敏感器的光学系统所选取的参数,必须保证使星敏感器对特定数量的恒星具有足够高的捕获概率,同时应当尽可能的降低设计难度。但是存在一对矛盾:随着焦距f的减小,光学系统的视场增大,每颗星在视场中出现的概率增加;但由于孔径随f减小,敏感器的极限星等降低,使得更多的暗星即使出现在视场中也不能被星敏感器所探测到;反之,随着f增大,光学系统的孔径增大,敏感器的极限探测星等提高,所能探测到的总星数也就越多;但同时视场减小,每颗星出现在视场中的概率降低。因此,必须研究光学系统参数和捕获概率的关系,以确定所选取的参数是否能够保证星敏感器具有预期的捕获概率。
4 实例分析
本文以APS CMOS图像传感器IBIS5[9]为例进行分析,其主要参数如表1。

表1 NOII5SM1300A主要参数

浙江大学[6]之前选取焦距为35mm,F值为1.4的一款镜头。由表1参数可知图像传感器的尺寸为8.6mm×6.9mm,根据光学系统焦距与视场的关系:

得到镜头视场为14°×11.3°。将以上参数带入式(15),得mS=6.5。将镜头视场和星等参数带入式(16),得到可探测恒星数目为45.2颗。
此次研究探测星等为四等星,预设mS=4.5。将以上参数代入式(15),求得镜头有效口径大小为9.8mm,预设F=1.4,则镜头焦距为13.7mm。
根据以上结果,选取一款焦距为16mm,F值为1.4的成品镜头。参数对比如表2。

表2 镜头参数对比

图2 35mm镜头拍摄的图片

图3 16mm镜头拍摄的图片
通过图2和3的对比可知,16mm镜头拍摄的图片明显要比35mm镜头拍摄的图片视场大。同时,由表2可知,16mm镜头的体积和重量比35mm镜头减小1/4,这有利于星敏感器的微型化。
5 结论
从噪声中信号的检测理论入手[5],通过星敏感器星图的信噪比来研究星敏感器的探测灵敏度,推导出计算探测灵敏度的模型。分析了星敏感器镜头各参数间的关系,分别计算出35mm和16mm镜头的视场大小、探测星等和可探测恒星数目。最后用浙江大学[6]研制的星敏感器原理样机,分别采用焦距为35mm和16mm镜头拍摄两张对比图片。经分析,本文选用的16mm镜头与原镜头相比,具有更大的视场,足够的可探测恒星数,可选成品镜头的体积和重量减小1/4,对星敏感器的微型化有积极影响。
[1] 杨波,王跃钢,秦永元,柴艳.捷联惯导/星敏感器组合系统的在轨自标定方法研究[J].航天控制,2010,28(1):13.(Yang Bo,Wang Yuegang,Qin Yongyuan,et al.Research on autonomous calibration on orbit for the integrated system of strapdown inertial navigation system and star sensor[J].Aerospace Control,2010,28(1):13.)
[2] 毛晓楠,梁为升,郑循江.基于并行运算体系结构的星敏感器图像处理算法[J].宇航学报,2011,32(3):613.(Mao Xiaonan,Liang Weisheng,Zheng Xunjiang.A parallel computing architecture based image processing algorithm for star sensor[J].Journal of Astronautics,2011,32(3):613.)
[3] 王晓东.大视场高精度星敏感器技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2003:18-19,23-24,27.(Wang Xiaodong.Study on Wild-Field-of-View and High-Accuracy Star Sensor Technologies[D].Changchun:Changchun Institute of OPtics,Fine Mechanics and Physics Academia Sinica,P.R.China,2003:18-19,23-24,27.)
[4] 李杰.APS星敏感器关键技术的研究[D].长春:中国科学院长春光学精密机械与物理研究所,2005:74-79.(Li Jie.Study on Key Technique of APS Star Sensor[D].Changchun:Changchun Institute of OPtics,Fine Mechanics and Physics Academia Sinica,P.R.China,2005:74-79.)
[5] 刘金国,李杰,郝志航.APS星敏感器探测灵敏度研究[J].光学精密工程,2006,14(4):554-557.(Liu Jinguo,Li Jie,Hao Zhihang.Study on detection sensitivity of APS star tracker[J].Optics and Precisi on Engineering.2006,14(4):554-557.)
[6] 王萌萌.适用于皮纳卫星的微型星敏感器设计与测试[D].杭州:浙江大学,2014;24-25(Wang Meng-Meng.Design and Test of Micro Star Tracker for Picosatellite[D].Hangzhou:Zhe Jiang University,2014;24-25.)
[7] 刘智.CMOS图像传感器在星敏感器中应用研究[D].长春:中国科学院长春光学精密机械与物理研究所,2004:57.(Liu Zhi.Study on Application Technique of CMOS Imager in Star Tracker[D].Changchun:Changchun Institute of OPtics,Fine Mechanics and Physics Academia Sinica,P.R.China,2004:57.)
[8] 程伟宁.宽谱段宽视场星敏感器光学系统设计[D].哈尔滨:哈尔滨工业大学空间光学研究中心,2009:11-12.(Cheng Weining.Optical System Design of A Star Sensor With Wild Spectrum and Wild Field of View[D].Harbin:Harbin Institute of Technology,2009:11-12.)
[9] IBIS5A-13000 Imager[Z].http://www.fillfactory.com/htm/products/htm/ibis5.htm,2005.
猜你喜欢
中国光学(2021年6期)2021-11-25 07:48:32
摄影与摄像(2021年12期)2021-10-01 14:23:33
艺术品鉴(2021年21期)2021-08-15 05:54:58
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:24
锦绣·上旬刊(2020年3期)2020-06-08 09:43:52
中国医疗设备(2019年1期)2019-01-15 12:10:54
百科探秘·航空航天(2018年12期)2018-12-29 03:57:56
奥秘(2018年10期)2018-10-25 05:38:56
激光与红外(2015年10期)2015-03-23 06:07:18
物理实验(2015年9期)2015-02-28 17:36:45
