基于MAS的区域反导发射车协同拦截规划研究*1
2015-03-10 01:02宋文静,李为民,肖金科等
现代防御技术 2015年6期
基于MAS的区域反导发射车协同拦截规划研究*1
宋文静,李为民,肖金科,刘永兰
(空军工程大学 防空反导学院,陕西 西安710051)
摘要:发射车协同拦截规划是区域反导战术级目标分配后确定最优拦截方案的决策问题,对于直接提高拦截效费比具有重要意义。首先分析了协同拦截的物质基础、协同过程和协同特点,然后给出了基于多智能体系统(multi-agent system,MAS)的协同拦截规划模型、规划算法,最后计算了发射车可协同拦截次数,构建自适应协同拦截模式决策模型。开展基于MAS的区域反导发射车协同拦截规划研究,为实现发射车协同拦截规划顶层设计夯实坚实的技术理论基础。
关键词:区域反导;协同拦截;多智能体系统;发射车;规划;自适应
0引言
区域高低两层协同拦截速度高、进攻能力强的战术弹道导弹(tactical ballistic missile, TBM)逐渐成为反导系统发展的主要趋势之一[1-2]。在战术级的目标分配后,高低两层拦截系统如何规划所属拦截系统生成最优协同拦截方案是亟待解决的决策难题[3-4]。由于高低两层拦截系统所属发射车分布于不同的地理空间,跨度较大,而协同拦截决策的时间极为有限,传统自上而下的协同拦截规划方式,难以规划每个拦截系统最优拦截策略,难以满足反导战场复杂多变的态势变化。本文着眼于高低两层协同拦截TBM,将高低两层拦截系统看成发射车及雷达系统组成的一个异构、分布和松散耦合的复杂智能控制系统,采用MAS相关理论研究高低两层协同拦截规划问题。
1区域反导协同拦截分析
区域高低两层协同拦截是高、低组合拦截TBM,是大大提高拦截TBM概率的重要手段,其协同拦截物质基础见图1。
区域反导指控系统基于精确的预警信息,下达特定的拦截任务到高低两层拦截系统; 高层指控系统结合每个发射车的部署空间,计算每个发射车的发射区、最佳发射时机及选择最优拦截模式,然后协
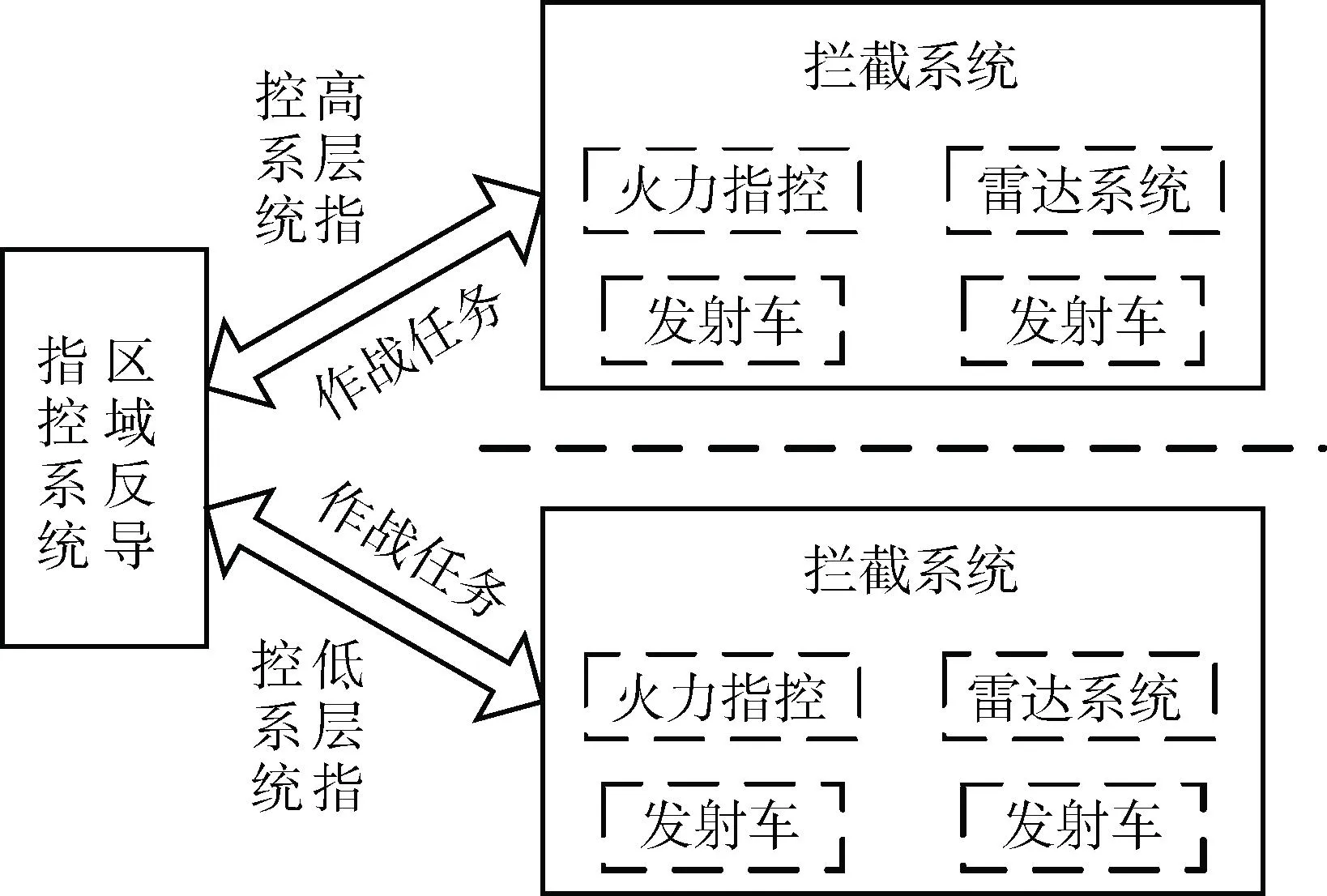
图1 区域反导协同拦截物质基础Fig.1 Substance foundation for cooperative interception in theater antimissile system
调控制发射车实施拦截;地基雷达观测整个拦截过程所得观测数据提供给区域指控系统,以便评估拦截弹是否成功拦截TBM,如果没有有效拦截TBM,则判断是否进行二次拦截;具备二次拦截条件时,进行二次拦截;一旦高层拦截系统不具备拦截条件或没有达到预定的拦截概率的,区域反导指控系统通过低层指控系统管控低层拦截系统进行再次拦截,相应低层拦截系统所属发射车执行区域低层指控作战指令,协同各发射车拦截。详见图2。
由图2可知,拦截系统拦截TBM时,高低两层哪几个发射架采取怎样的拦截策略和合适的拦截时机,同时能否协同拦截又避免拦截冲突,这都直接关系到拦截资源的消耗和拦截效能的高低。
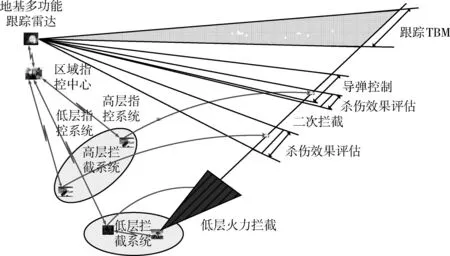
图2 区域反导高低两层协同拦截过程Fig.2 Highlow cooperative interception process in theater antimissile system
2基于MAS协同拦截模型
2.1协同拦截Agent分类
智能Agent是指在一定环境中运行,根据自身能力、状态、资源、相关知识以及外部环境信息,通过协同规划、推理和决策,灵活、自主地采取行动以实现其既定目标的实体[5-8]。分析区域协同拦截过程,从实施协同拦截实体的角度分析,需要设置的Agent主要包括:战场感知Agent、区域指控Agent、高层指控Agent、低层指控Agent、发射单元Agent、通信Agent,各Agent之间的交互关系见图3。
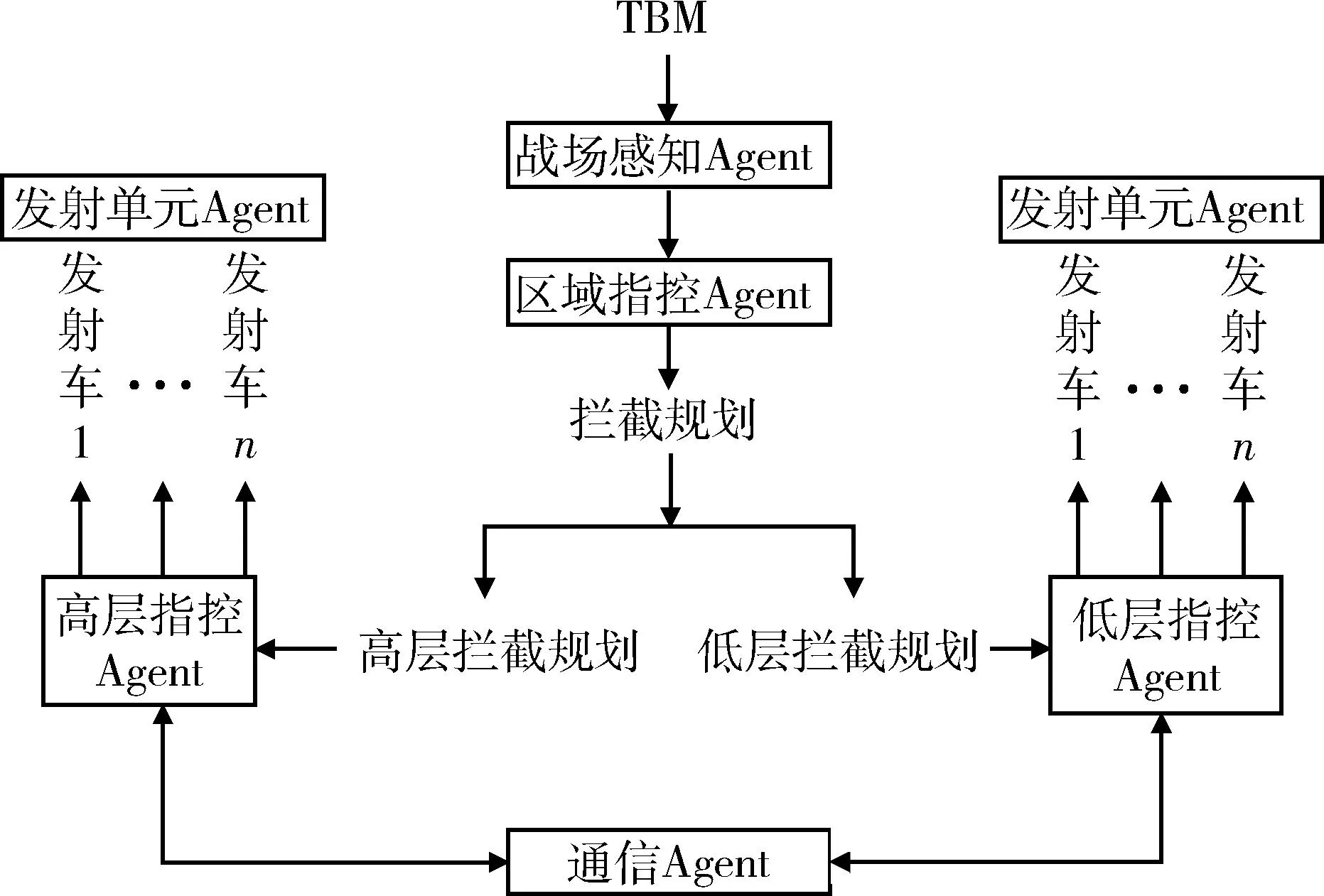
图3 各Agent之间的交互关系Fig.3 Interaction between different Agents
各组成Agent的作用描述如下:
战场感知Agent:融合来自传感器网的信息,形成一定精度的预测弹道和统一的态势图,分析TBM威胁;
区域指控Agent:根据战场态势,按照一定准则,基于态势进行决策处理,规划高低两层拦截系统的协同拦截,制定初步的拦截方案,并分配到两级指控,监控高低拦截系统的拦截情况;
高层指控Agent、低层指控Agent:依据区域指控的战术要求,结合所属发射车的状态、部署位置和TBM运动参数,选取最优的发射车的拦截模式和最佳拦截时机并实时地上报拦截情况到区域指控Agent;
发射单元Agent:执行指控Agent的作战方案,拦截TBM;
通信Agent:负责拦截规划过程中高低两级指控Agent与区域指控Agent、发射单元Agent间协作与协调的相关通信,不负责信息的处理。
通过图3,明确各Agent之间的交互关系,从整体上把握区域反导协同拦截Agent的功能与信息流程。
2.2基于MAS协同拦截模型
在区域反导协同拦截过程中,如果仅将各个作战实体抽象为独立的作战Agent,一方面,虽能整体分析协同拦截的流程,但难以精确描述协同拦截的内部机制;另一方面,由于拦截资源的有限性,各作战Agent自主化的制定拦截方案容易造成资源的冲突,并且难以实现统一的战术目标。例如采取“发射—发射”的拦截模式,获取了最大的杀伤概率,但可能占用了大量的拦截资源,大大降低了拦截系统的持续作战能力。
MAS对环境的变化具有适应力及相应的自我调节能力,并能通过与其他智能Agent进行交互的方式共同完成复杂问题求解的多个Agent构成的智能系统[9-12],具有学习、推理、规划、决策和创新能力,具有分布性、自主性和协作性等特点。为此,本文从高低两级指控规划发射车拦截的功能流程角度出发,建立了基于MAS协同拦截规划模型,见图4。
各组成Agent的作用描述如下:
可拦截性Agent:依据传感器网的目标指示信息,从时间、空间和物质约束3个方面进行可拦截性分析,确定可拦截特定TBM的发射车集合;
发射区域Agent:结合TBM的跟踪预测信息和发射车的杀伤区域,计算每个可拦截TBM的发射车的发射区域;
发射时间Agent:结合TBM的跟踪预测信息和发射车的杀伤区域,按照一定的方法,计算每个可拦截TBM的发射车的可发射时间;
拦截模式Agent:结合发射区域和可发射时间,根据发射车的最小可发射间隔,计算最大可拦截次数,组合“发射—发射”和“发射—观察—发射”2种基本拦截模式,规划每个可拦截TBM的发射车的最优复合拦截模式,以达到最佳拦截效果;
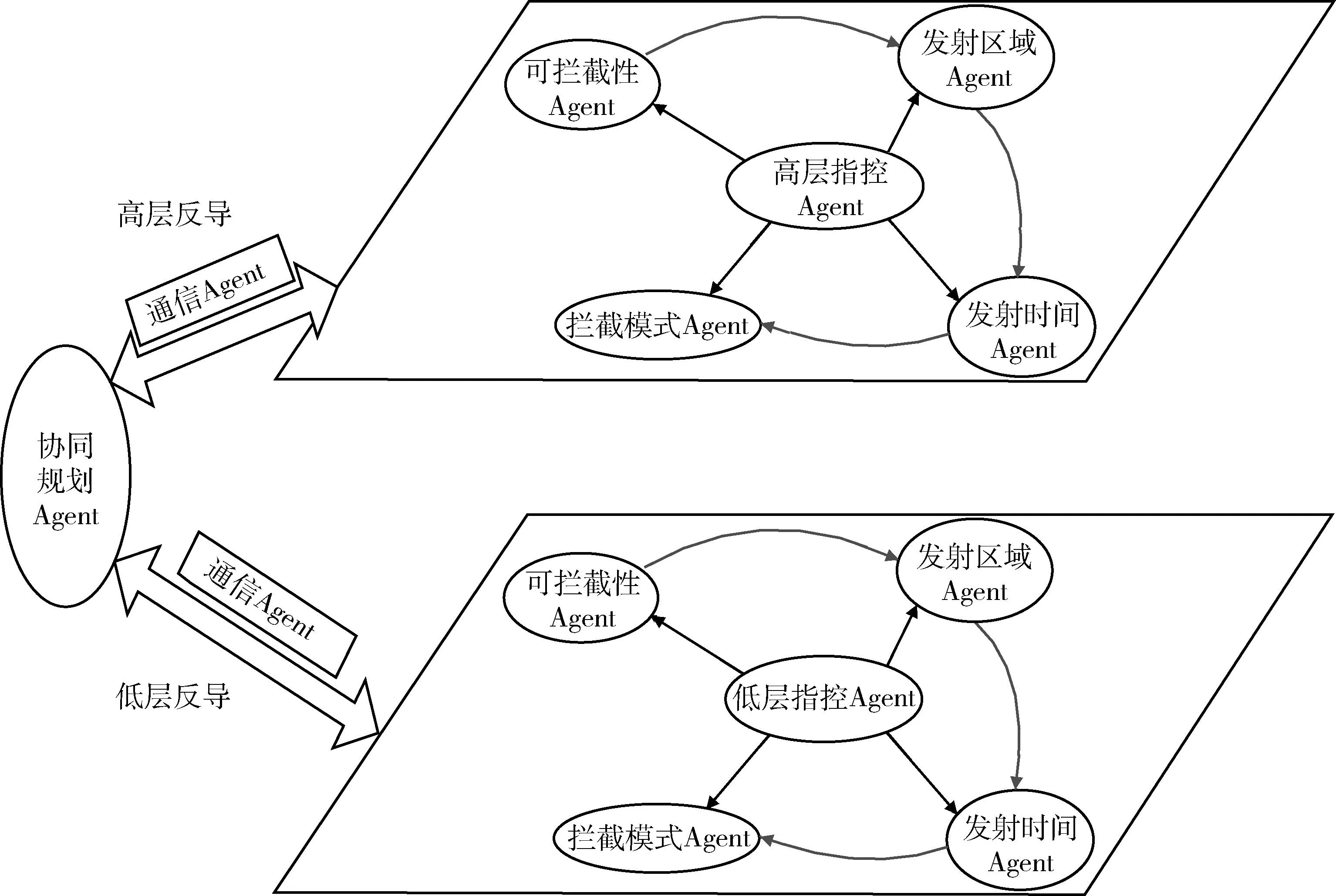
图4 基于MAS协同拦截规划模型Fig.4 Cooperative interception planning model based on MAS
高层指控Agent、低层指控Agent:一方面,实现可拦截性判断、发射区域计算、发射时间计算、拦截模式的规划和控制发射车实施拦截;另一方面,联合、协调不同的发射车实施拦截,平衡拦截冲突,提高拦截效费比;协同规划Agent:生成高低两层协同拦截规划方案;结合高层拦截系统的拦截策略和拦截效果,实时修正低层拦截系统的拦截方案;平衡高低两层拦截系统的拦截冲突。
2.3协同拦截规划方法
基于MAS的区域协同拦截规划是由中央协同规划Agent集中控制的规划,并分发给各个Agent独立执行,并接受协同规划Agent的协调与冲突消解。结合区域反导协同规划特点,给出如下步骤的协同规划方法:
Step 1:协同规划Agent基于预警信息,初步规划高低两层协同拦截方案,下传到高低两级指控Agent。
Step 2:高层指控Agent依次确定可拦截TBM的发射架集合及其发射区域、可发射时间、最优拦截模式。
Step 3:高层指控Agent确定协调若干发射车实施拦截的最优方案,评估该方案并上报协同规划Agent。
Step 4:若方案足以拦截,该方案就是最优协同拦截规划方案,规划终止;否则,协同规划Agent向若干个低层指控Agent下达协同拦截指令,补充拦截。
Step 5:低层指控Agent确定可拦截TBM的发射架集合及其发射区域、可发射时间、拦截模式,确定协调若干发射车实施拦截的最优方案。
Step 6:低层指控Agent确定协调若干发射车实施拦截的最优方案,并上报协同规划Agent。
Step 7:协同规划Agent得到最终的协同拦截规划方案。
基于MAS协同拦截规划模型采取自下而上的分布式决策方式,是基于火力单元级指控系统控制发射车实施拦截,大大减少了区域反导指控的信息处理量,提高了协同拦截决策效率;协同决策方案是综合集成了高低两层决策方案,保证了协同拦截方案的科学性。基于MAS协同拦截规划模型更善于处理复杂多变的反导协同拦截规划问题。
3自适应协同拦截模式决策模型
3.1可拦截次数计算
可发射时间是以发射车时间为基准,拦截点分别在拦截系统杀伤区域近、远界时,发射车发射相应拦截弹的最早、最晚时刻之差。在发射车连续发射拦截弹的时间间隔约束下,研究高层拦截系统的可发射时间,可确定拦截TBM的最大次数,优选发射方式。
在给出可发射时间的计算过程之前,相关符号及其意义见表1。
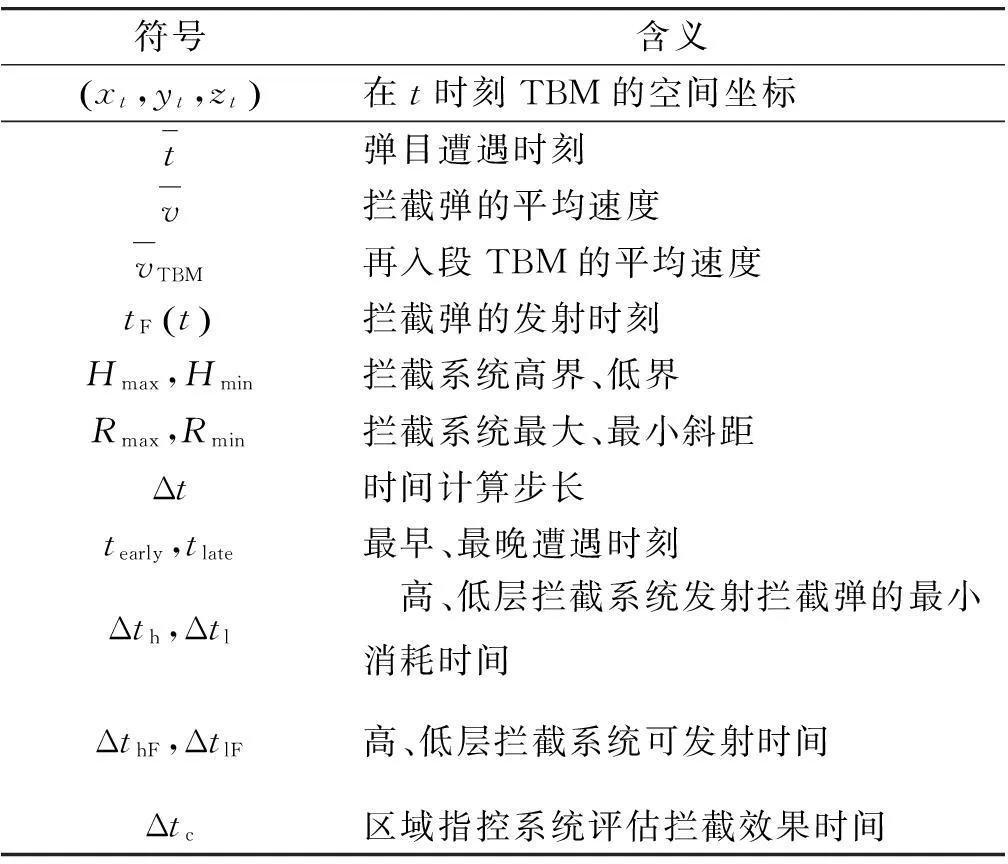
表1 相关符号及其意义
以发射车为原点,在允许误差范围内,将末段弹道看作直线[13-14],由式(1)求取式(2)。
(1)
(2)


(3)
则t′时刻TBM到发射车的距离
(4)
假设雷达跟踪TBM的距离大于杀伤区远界,根据式(2),可知求解可发射时间问题核心就是求解tearly和tlate。
基于时间逐步推进的方式依次得到TBM弹道与杀伤区产生第一个、最后一个交点对应的最早和最晚遭遇时刻tearly和tlate,计算流程如图5所示。
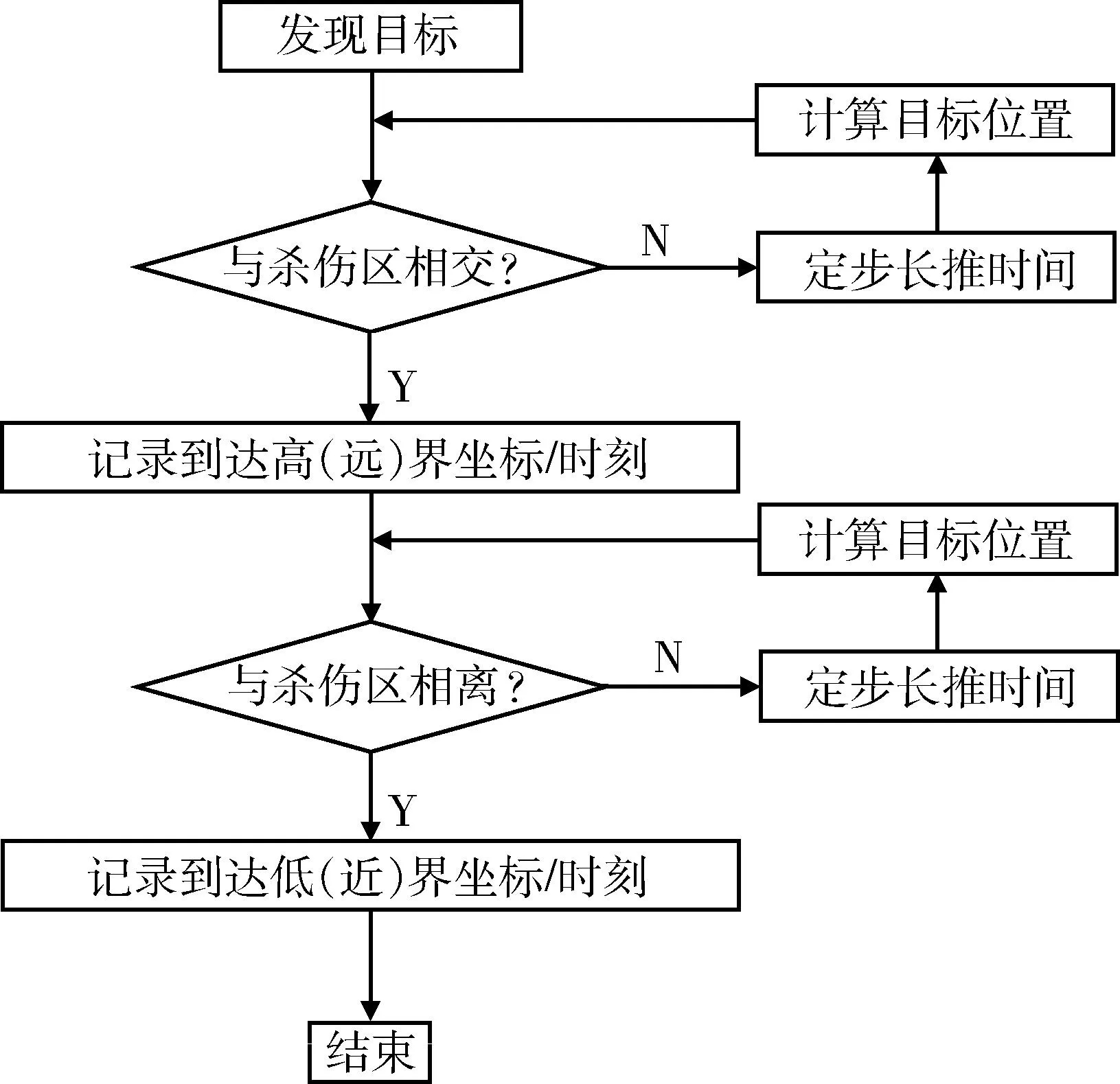
图5 基于时间逐步推进求取遭遇时刻Fig.5 Encountering time point calculated by time step
从而得到可发射时间窗口为
(tF(tearly),tF(tlate)),
即可发射时间
ΔtF=tF(tlate)-tF(tearly).
(5)
对于已经分配TBM的拦截系统,至少具备一次拦截机会,则“发射—观测—发射”和“发射—发射”方式下高层拦截系统最大可拦截次数分别见式(6)和式(7),低层拦截系统一般只采取“发射—发射”方式下最大可拦截次数见式(8):
(6)
(7)
(8)
3.2自适应协同拦截模式决策流程
拦截模式是拦截系统发射方式和发射拦截弹数目的综合,自适应拦截模式决策的原理就是在一定的自适应原则下,通过比较最大可拦截次数和交战有效性之间的关系自适应的选择拦截模式。自适应拦截模式决策的实现过程如下:
Step 1:确定设防对象的防御等级[15-16]fn。
Step 2:iffn=3,转入Step 3;iffn=4,转入Step 6。
Step 3: ifNslshmax≥2,高层拦截系统采用“发射—观测—发射”发射方式发射2枚拦截弹,低层拦截系统发射1枚,规划结束。
Step4: ifNslshmax<2,高层拦截系统发射一枚拦截弹,转入Step 5。
Step 5: ifNsslmax≥2,低层拦截系统同一发射车采用“发射—发射”方式连续发射2枚拦截弹;否则,规划具备拦截条件的2个发射车采取集火射击方式发射2枚拦截弹,规划结束。
Step 6: ifNslshmax≥2,高层拦截系统采用“发射—观测—发射”发射方式发射2枚拦截弹,低层拦截系统发射拦截弹数见Step 5。
Step 7: ifNslshmax<2,高层拦截系统发射一枚拦截弹,转入Step 8。
Step 8: ifNsslmax≥3,低层拦截系统同一发射车采用“发射—发射”方式连续发射2枚拦截弹;否则,规划具备拦截条件的2或3个发射车采取集火射击方式发射3枚拦截弹,规划结束。
4结束语
区域反导协同拦截是涉及到战场态势、发射车空间部署和战技参数等多因素的复杂规划问题,鉴于协同拦截规划的复杂性,本文初步探讨了协同拦截的物质基础、过程分析、特点分析,并提出了基于MAS的协同拦截规划模型及规划算法,力求实现高低两层拦截系统级协同拦截规划顶层设计;构建了自适应协同拦截模式决策模型,给出了区域反导协同发射车协同拦截最优拦截模式生成机制。
参考文献:
[1]肖金科,王刚,付强,等.反导C2BM技术体系结构研究[J].飞航导弹,2012(9):57-61.
XIAO Jin-ke,WANG Gang,FU Qiang, et al.Research on Technology Requirement of C2BM in Anti-missile System[J].Aerodynamic Missile Journal, 2012 (9):57-61.
[2]肖金科,王刚,刘昌云,等.DoDAF的末段反导C2BM系统需求分析[J].火力与指挥控制,2013,38(8):13-17.
XIAO Jin-ke,WANG Gang,LIU Chang-yun, et al. Research on Requirement Analysis of C2BM in Terminal Anti-Missile System Based on DoDAF[J].Fire Control & Command Control,2013,38(8):13-17.
[3]肖金科,王刚,李松,等.区域反导高低两层联合可发射时间计算模型与仿真[J].战术导弹技术,2013(4):103-107.
XIAO Jin-ke,WANG Gang,LI Song, et al. Coalescent Shooting Time Calculation and Simulation of Theater Anti-Missile High-Low Firepower[J].Tactical Missile Technology,2013(4):103-107.
[4]肖金科,王刚,刘昌云,等.多层反导目标分配建模及其优化方法研究[J].电光与控制,2013,20(10):62-65.
XIAO Jin-ke,WANG Gang,LIU Chang-yun, et al.Target Assignment Modeling of Multi-Layered Anti-Missile System and Its Optimization[J].Electronics Optics & Control,2013,20(10):62-65.
[5]Maja Stula, Darko Stipanicev,Losip Tiaras. Distributed Computation Multi-Agent System[J]. New Generation Computing,2013,31(3):187-209.
[6]陈淼,韩端锋,于洋,等.基于Agent的舰船人员疏散模型研究[J].计算机工程与科学,2013,35(4):163-167.
CHEN Miao,HAN Duan-feng,YU Yang,et al. Ship Passenger Evacuation Model Based on Agent Theory[J]. Computer Engineering & Science,2013,35(4):163-167.
[7]Louise A Dennis, Michael Fisher,Nicholas K Lincoln,et al. Practical Verification of Decision-Making in Agent-Based Autonomous Systems[J]. Autom Softw Eng, DOI 10.1007/s10515-014-0168-9.
[8]Tibor Bosse, Rob Duell, Zulfiqar A,et al. Agent-Based Modeling of Emotion Contagion in Groups[J]. Cogn Comput,DOI 10.1007/s12559-014-9277-9.
[9]唐贤伦,李亚楠,樊峥.未知环境中多Agent自主协作规划策略[J]. 系统工程与电子技术,2013,35(2):345-349.
TANG Xian-lun,LI Yan-nan,FAN Zheng. Multi-Agent Autonomous Cooperation Planning Strategy in Unknown Environment [J]. Systems Engineering and Electronic,2013,35(2):345-349.
[10]陈世明,李慧敏,谢竟,等. 基于局部估计的功率驱动多智能体网络牵制蜂拥控制算法[J]. 控制与决策,2013,28(8):1190-1194.
CHEN Shi-ming,LI Hui-min,XIE Jing,et al. Pinning Flocking Control Algorithm for Power-Driven Multi-Agent Networks Based on Local Estimation[J]. Control and Decision,2013,28(8):1190-1194.
[11]Xiaoqin Shelley Zhang, Victor Lesser. Meta-level Coordination for Solving Distributed Negotiation Chains in Semi-Cooperative Multi-Agent Systems[J]. Group Decis Negot,2013,22(4):681-713.
[12]Dane M Kuiper, Rym Z Wenkstern. Agent Vision in Multi-Agent Based Simulation Systems[J]. Auton Agent Multi-Agent Syst, DOI 10.1007/s10458-014-9250-8.
[13]吴兆宗. 再入飞行器再入函数及其导数与积分[J]. 导弹与航天运载拄术,2005(2):39-43.
WU Zhao-zong. Reentry Vehicle’s Reentry Function and Its Derivate & Integral[J]. Missiles and Space Vehicles,2005(2):39-43.
[14]彭岁阳,张军,沈振康.非匀速弹道、SAR成像方法研究[J].宇航学报,2011,32(12):2550-2559.
PFNG Sui-yang,ZHANC Jun,SHEN Zhen-kang. The SAR Imaging Method of the Non-Uniform Straight Line Trajectory[J]. Journal of Astronautics,2011,32(12):2550-2559.
[15]向小梅. 基于SVM的舰艇自动防御体系设计[J]. 舰船电子工程,2014,34(4):24-26.
XIANG Xiao-mei. Automatic Defense System Design of Ships and Submarines Based on Support Vector Machine[J]. Ship Electronic Engineering,2014,34(4):24-26.
[16]XIAO Jin-ke,WANG Gang,FU Qiang,et al. Modeling and Simulation of Theater Anti-missile System Threat Assessment Based on Electric Field [J]. ICIC Express Letters Part B: Applications,2014,5(5):1419-1424.
Cooperative Interception Planning of Launcher Vehicles Based on MAS in Theater Antimissile System
SONG Wen-jing,LI Wei-min,XIAO Jin-ke,LIU Yong-lan
(AFEU,Air And Missile Defense College, Shaanxi Xi’an 710051,China)
Abstract:Cooperative interception planning of launcher vehicles is the decision making problem of making optimal interception project after the tactical target assignment, which has a great and direct significance in improving the interception cost effectiveness ratio. Firstly, material basis, cooperative process and cooperative characteristic are analyzed, then cooperative interception planning model based on multi-agent system(MAS)is constructed and its planning algorithm is presented. Lastly interception times are calculated and self adaption cooperative interception decision making model is constructed. Research on cooperative interception planning of launcher vehicles based on MAS in theater antimissile system aims at laying solid technology and theory foundation for top planning of launcher vehicles cooperative interception.
Key words:theater antimissile system; cooperative interception; multi-agent system(MAS); launcher vehicle; planning; self-adjust
中图分类号:TJ768.2+8;TP391.9
文献标志码:A
文章编号:1009-086X(2015)-06-0081-06
doi:10.3969/j.issn.1009-086x.2015.06.014
通信地址:710051陕西省西安市长乐东路甲字一号空军工程大学防空反导学院研究生2队E-mail:811627389@qq.com
作者简介:宋文静(1979-),女,湖南常德人。博士生,主要研究方向为反导作战指挥控制。
基金项目:2013年度研究生学位论文创新基金(DY13206)
*收稿日期:2014-07-09;修回日期:2015-01-10
猜你喜欢
建材发展导向(2022年2期)2022-03-08
房地产导刊(2021年6期)2021-07-22
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
领导决策信息(2018年50期)2018-02-22
商周刊(2017年5期)2017-08-22
中国教育信息化·基础教育(2016年11期)2016-12-27
软件导刊(2016年11期)2016-12-22
科技视界(2016年26期)2016-12-17
科教导刊·电子版(2016年26期)2016-11-21
汽车科技(2016年5期)2016-11-14