
基于AMESim的遥操作抹光机液压系统设计与仿真
2015-03-09 03:33黄志辉姜俊超廖湘华
机床与液压 2015年21期
黄志辉,姜俊超,廖湘华
(中南大学机电工程学院,湖南长沙 410083)
基于AMESim的遥操作抹光机液压系统设计与仿真
黄志辉,姜俊超,廖湘华
(中南大学机电工程学院,湖南长沙 410083)
分析了双盘抹光机驱动机制,研究抹光机液压系统结构组成及其工作原理,建立了基于AMESim平台的抹光机液压系统仿真模型。仿真结果表明,液压系统能完成设定的仿真工况,其仿真结果对系统的设计和优化具有参考意义。
抹光机;液压建模;仿真;AMESim软件
0 前言
随着城市建设高速发展,地下停车场、厂区道路、大型厂房地面等大面积混凝土地面不断增多,对混凝土面层的质量要求越来越高。传统的人工作业施工方法效率低,而且路面平整度一致性差。使用抹光机对混凝土地面进行抹光可以获得表面更光滑,品质一致性好的密实耐磨表面,节省了劳动力,提高了施工效率。我国在抹光机方面的研究、生产以及应用方面,都和国外有较大的差距,国内产品已无法满足日益庞大的市场。越来越多的施工单位迫切希望自动化的国产抹光机能够快速上市,从而替代进口产品,减少对国外设备的依赖。液压系统在抹光机上的应用使得抹光机工作更平稳可靠,与以往的连杆式操作结构相比,具有响应迅速、操作简易的优点,且便于和控制耦合做成高度自动化。液压系统的传统设计过程需要设计者依靠理论计算和自身积累的丰富经验来搭建一个动态的液压系统。需要做大量的试验对系统进行调试以确定相关参数。这种方法费时费力且参数的调节比较困难,效果不显著。随着计算机仿真技术的发展和仿真平台的完善,使用计算机对实际系统的动态
特性进行数字仿真成为工程系统设计中的有效手段。在计算机上进行仿真实验,调整参数即可以研究实际
物理系统的不同工况,从而可以确定最佳参数匹配,这样使得液压系统和液压元件的设计缺陷在物理成型前就得到了处理,大大地缩短了设计周期、降低了设计成本。文中的研究基于AMESim仿真软件,对遥操作抹光机液压系统进行仿真和分析,为系统设计优化和试验参数调节提供有价值的参考依据。
1 仿真软件简介
AMESim(Advanced Modelling Environment for Performing Simulations of Engineering Systems)高级工程系统仿真环境软件平台是法国IMAGINE公司于1995年推出的图形化的开发环境,专门用于工程系统的建模、仿真和动态性能分析。用户在这个单一平台上可以建立复杂的多学科领域的系统模型,并在此基础上进行仿真计算和深入分析。该多学科领域复杂系统建模仿真平台使得工程师能迅速达到建模仿真的最终目标:分析和优化工程师的设计,从而帮助用户降低开发的成本和缩短开发周期。AMESim为用户提供了一个时域建模仿真环境,可使用已有模型或创建新的元件模型,搭建用户所需的实际模型。面向工程交互设计的可视化仿真界面采用标准的ISO元器件图标和简单直观的多端口框图,方便建立模型并修改模型和仿真参数。
文中的研究正是基于以上AMESim软件的优点而采用该软件进行仿真。
2 遥操作抹光机液压系统仿真
2.1 遥操作抹光机运动的驱动机制
所研究的抹光机是双抹头的,有两个叶轮组,每个叶轮组有3枚叶片。结构示意图如图1。
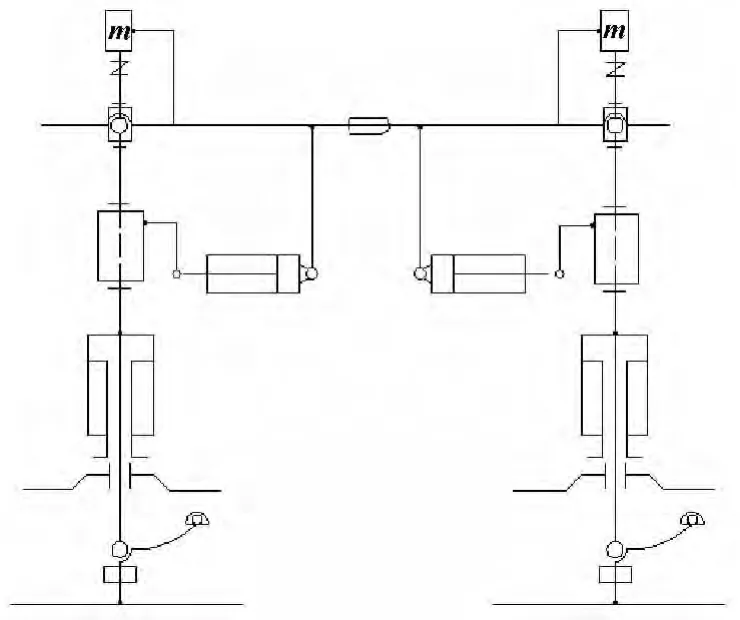
图1 遥操作抹光机结构示意
两个抹头绕安装轴OA转动的方向相反,当两个抹头底面BAC均平行于地面时,抹光机整机受外力平衡而不产生移动。当两个抹头相对地面有一定倾角时 (倾角大小由液压缸行程多少调节),由于摩擦力的大小和方向发生变化,引起抹光机整机受外力不均衡而产生移动。若左右叶轮箱笼壳体上施加一水平外力,箱笼壳体和叶轮转轴OA绕点O转动一个微小的角度,叶轮底部发生倾斜与地面间接触不均匀,内侧所受滑动摩擦力使抹光机向前运动,双抹头叶片受力分析如图2所示。其驱动属于摩擦驱动。在抹头转速一定的前提下,运动速度的大小和运动方向的改变由两个抹头相对于地面的倾角和主轴倾角变化来协调控制。改变水平外力的方向,使叶盘向不同方向倾斜,即可实现抹光机的前进、后退、旋转等运动。
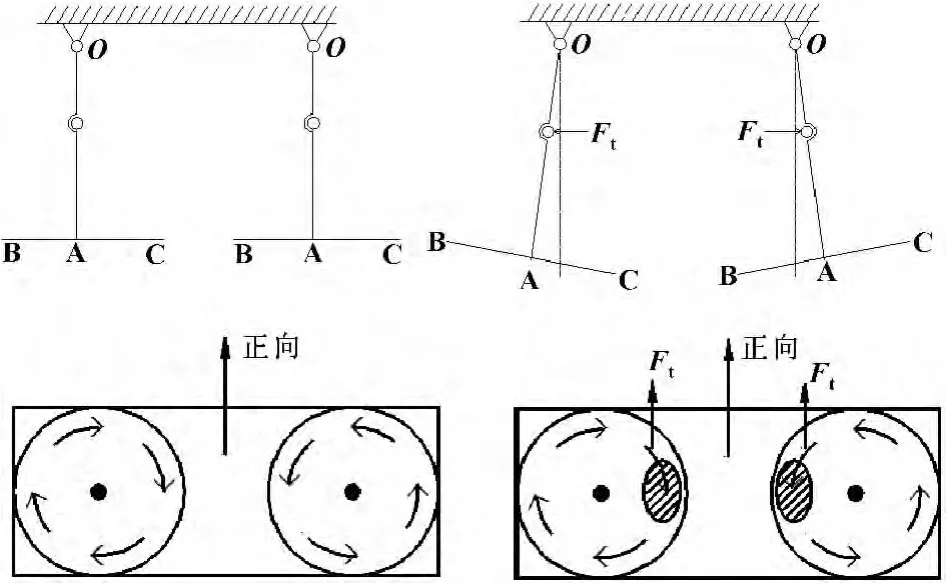
图2 叶片受力分析简图
2.2 遥操作抹光机液压系统建模与仿真
遥操作抹光机液压系统原理图如图3所示。动力源选用一台汽油发动机,输出轴通过联轴器与三联串泵输入轴联接实现动力传递。
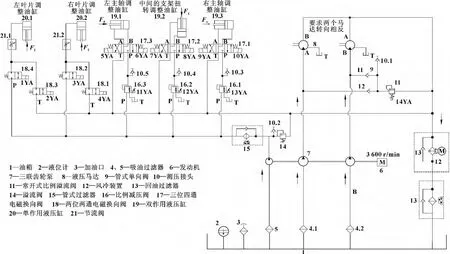
图3 遥操作抹光机液压原理图
双抹头的叶轮组抹刀叶片由液压马达8分别驱动,三联泵7中的前泵和中泵分别直接驱动两个液压马达。要求抹头叶轮工作转速在40~120 r/min范围内,为防止启动造成过大的瞬时冲击,设计引入了常开式电磁比例溢流阀11。当抹光机启动时,双泵出口压力油经溢流阀开口回流至液压油箱;线圈14YA得电则将电磁比例溢流阀阀口缓慢关闭,马达受到的驱动压力逐渐上升直至马达输出扭矩能克服叶片受到的摩擦阻力而使叶轮组转动,从而达到微冲击启动的目的。当需要停车时,将14YA断电则可打开电磁比例溢流阀阀口使压力油回流至油箱,马达受到的驱动压力减小直至马达输出扭矩不足以克服叶片阻力而使叶轮组停止转动,然后关闭发动机即可。三联泵7中的后泵为执行元件液压缸及其控制回路供油。考虑到电磁阀的使用寿命和系统的使用稳定性对油液清洁度的要求,在后泵出油口增加了一个管路过滤器15。设计单作用液压油缸通过压盘机构对叶片倾角进行调节。电磁换向阀18.4的线圈1YA通电时,阀口打开,压力油流经节流阀21.1进入单作用液压油缸,活塞下压经压盘机构使叶片倾角增大。断开电磁换向阀18.4的线圈1YA,使电磁换向阀18.3的线圈2YA得电,则单作用液压缸压力腔的压力油经过节流阀21.1,电磁换向阀18.3至油箱回路接通,由于抹光机自重使得单作用液压缸的活塞回缩,叶片倾角随之减小。两个抹头的倾角要基本一致,为此需要对电磁换向阀进行必要的逻辑控制。3个双作用液压油缸19.1、19.2、19.3调节主轴倾角。在液压缸进油路上引入了电磁比例减压阀16.1、16.2、16.3,通过控制阀口压力即可达到控制主轴倾角的目标。
对图3进行必要的合理简化后,启动AMESim软件,进入草图模式,从元件库中分别选取恰当的元件搭建液压系统模型。模型搭建过程中尽量选取已有的集成好的模型,当没有对应的恰当模型时选用合适模型进行组配以达到使用性能。对于特殊的元件则需要进行独立建模。
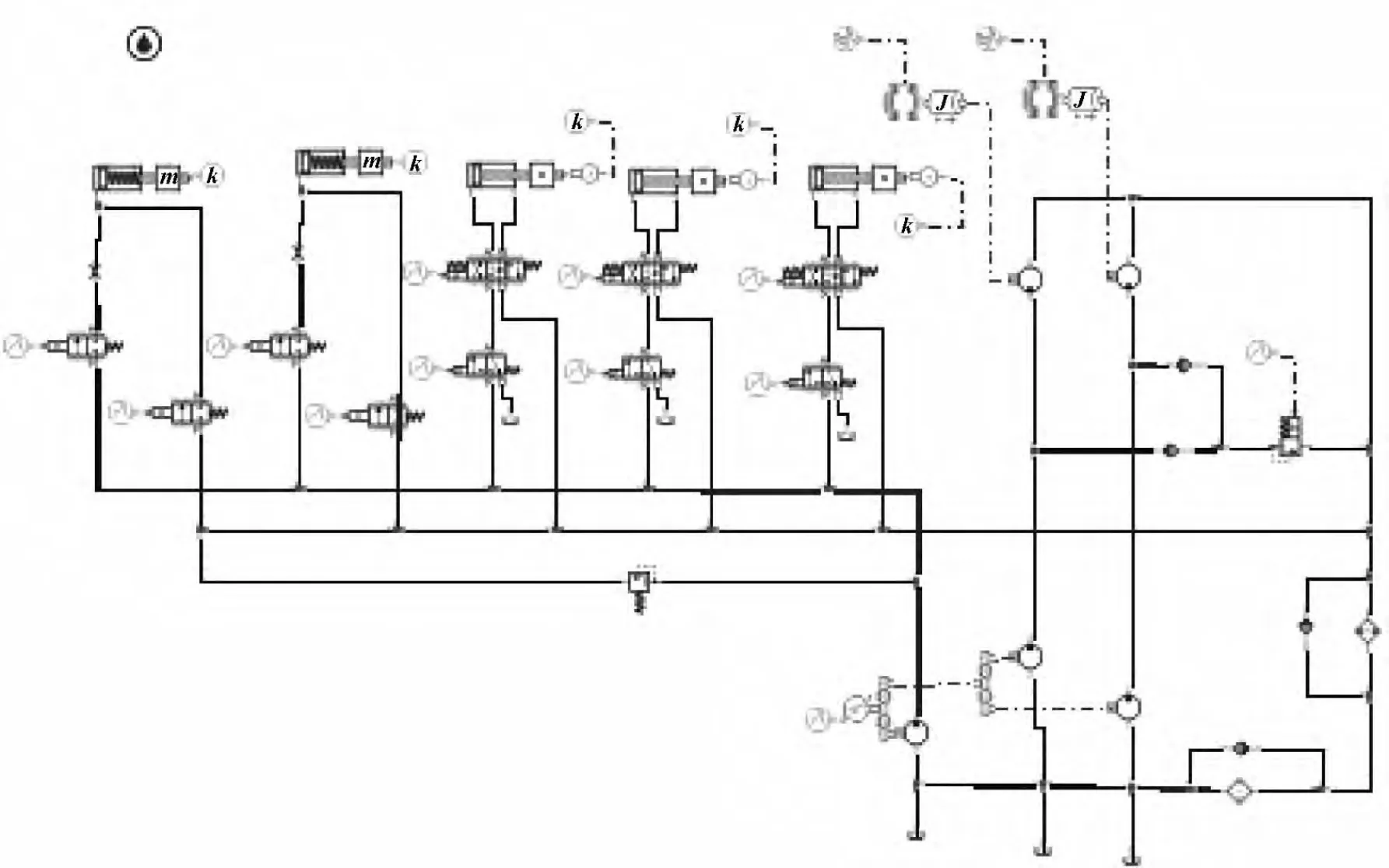
图4 液压系统仿真模型

表1 基本参数
仿真用到的主要参数如表1。
整机质量根据市场调研和设计要求设定,阻力矩极值是在叶片极限倾角和主轴极限倾角下测算得出的结果。
因结构需要将单作用液压缸设计为中空环式,仿真时,在模型中选用单端口单杆液压缸进行代替。控制单作用液压缸的两位两通电磁阀最大流量20 L/min,工作电流40 mA,工作频率50 Hz。主要参数如表2。

表2 单作用液压缸参数
为了保证仿真结果的可靠性,该模型中液压缸承受的载荷采用液压缸承受的最大载荷。电磁比例减压阀控制进入双作用液压缸的油液压力,其压力 (0~5 MPa)大小与工作电流 (0~1.8 A)成比例输出。三位四通电磁换向阀控制双作用液压缸的输出力的方向,最大流量25 L/min,工作电流40 mA,工作频率50 Hz。主要参数如表3。
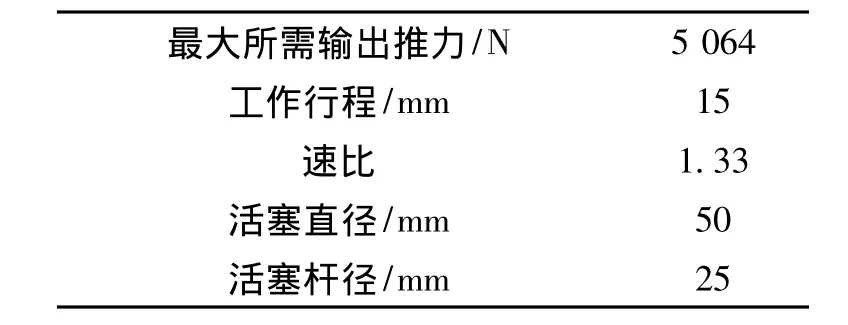
表3 双作用液压缸参数
为了最大限度地使系统仿真结果符合实际工作情况,考虑了油路的压力损失,包括沿程压力损失和局部压力损失。管路参数依据管路设计长度、管径、粗糙度等在模型中设定参数。因数据繁多,文中不再赘述。
2.3 仿真结果与分析
仿真系统要求整机启动时间为2 s,估算液压缸行程时间为3 s,设置仿真时间为30 s,时间步长为0.1 s。需要在施工前根据混凝土面状况调整好叶片倾角,在施工过程中一般不调整叶片倾角,但是要在施工过程中随时调整主轴倾角以调整整机的行进方向和行驶速度。仿真结果如下:考虑混凝土表面对叶片的阻力是变化,将地面对叶片的阻力矩设定在计算值附近±10%随机波动。图5所示为变阻力矩时的马达输出力矩。图6为马达流量波动。图7为泵出口压力波动,图8为泵输入扭矩波动。
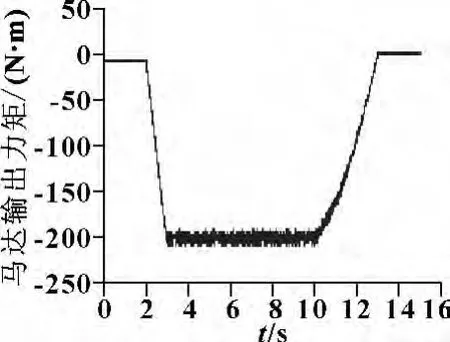
图5 变阻力时马达输出力矩
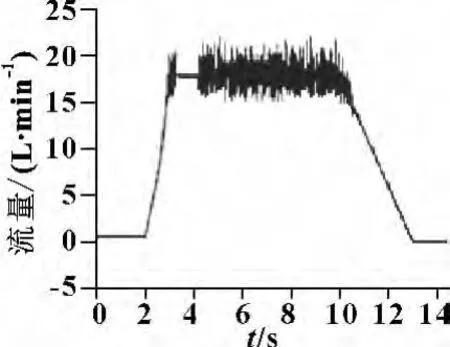
图6 变阻力时马达流量
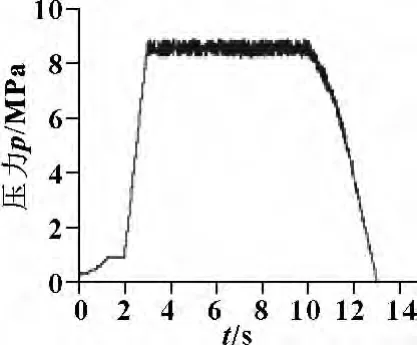
图7 泵出口压力

图8 泵输入扭矩
仿真中如果采用恒阻力矩,则得到光滑的曲线。此处各参数的波动随变输入阻力矩的波动而波动,如果浇注混凝土不均匀将导致阻力矩有较大的波动。阻力矩的波动引起马达输出力矩,流量等参数波动。液压系统中前泵和中泵分别控制两个液压马达,当叶轮组受到不同的阻力矩时,一组泵-马达系统受另一组的影响很小。此液压系统能够稳定运行。
叶片倾角调整过程中,单作用液压缸参数的变化。此处仿真模拟单作用液压缸一个往复行程,叶片倾角随着活塞位移增大逐渐增大,当达到最大位移时叶片倾角最大。在任意位移处均可实现位置保持以保持特定的叶片倾角。图9—11分别为单作用液压缸的流量、活塞位移和压力变化图。

图9 流量变化

图10 活塞位移变化
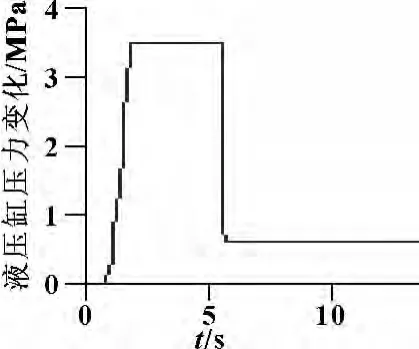
图11 压力变化
双作用液压缸控制主轴倾角的调整。由于整机结构紧凑,活塞杆的行程较小。速度和行进方向的调整要求响应要快,为此活塞杆的速度相对要大一些。液压缸及其控制阀路由后泵供油,液压缸在换向时对后泵出口压力造成了一定波动。在选用液压元器件时应当注意波动的影响。图12—15分别为双作用液压缸的压力变化、流量波动、活塞杆速度和后泵输出口压力变化图。

图12 双作用液压缸压力变化
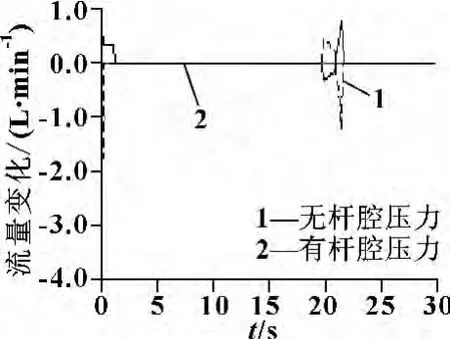
图13 双作用液压 缸流量波动

图14 双作用液压缸 活塞杆速度
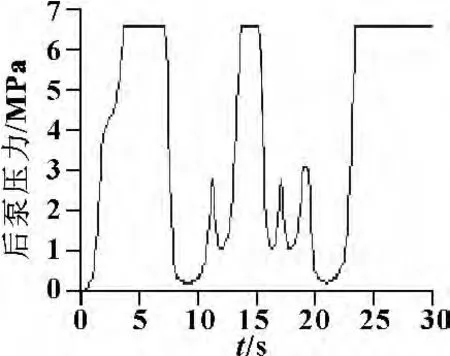
图15 后泵输出口压力
3 结论
分析了遥操作抹光机驱动机制为不平衡的摩擦力驱动,在此基础上对设计目标的结构进行合理优化。研究了遥操作抹光机液压系统构成和工作原理,建立了基于AMESim的遥操作抹光机液压系统模型。通过仿真得到了抹光机启动停止和转向变速时系统中各元件的压力和流量变化。结果显示遥操作抹光机液压系统运行稳定可靠,证明了系统设计的可行性,为优化设计参数选取和样机试验提供参考。
[1]王良文,张建堂,王景秋,等.叶片式抹光机的研制开发与应用[J].建筑机械,2002(9):31-32.
[2]张建堂.水泥混凝土地面抹光机的现状及发展趋势[J].建设机械技术与管理,2002(9):30 -31.
[3]秦家升,游善兰.AMESim软件的特征及其应用[J].工程机械,2004(12):6-8.
[4]SHIN Dong Hun,KIM Ho Joong.Twin Brush Floor Polishing Robot[J].Journal of Intelligent and Robotic Systems,2000,29(3):295 -308.
[5]ALLEN J D.Riding Trowel for Concrete Finishing:U.S,5238323[P].1993 -08 -24.
[6] Nordic Construction Equipment AB.The specification of Tremix Double ride-on trowel PRO RIDER[Z].Sweden:2009.
[7]SHIN Dong Hun,KIM Ho Joong,LEE Ho Gil,KIM Hong Seok.Omni-directional Self-propulsive Trowelling Robot[J].Process of IEEE International Conference on Robotics&Automation,1998(4):2689 -2696.
[8]付永领,齐海涛.LMS Imagine.Lab AMESim 系统建模和仿真参考手册[M].北京:北京航空航天大学出版社,2011.
[9]余佑官,龚国芳,胡国良.AMESim仿真技术及其在液压系统中的应用[J].液压气动与密封,2005(3):28-31.
[10]杨乐,童明波.基于AMESim后登机门液压系统设计与仿真[J].液压与气动,2014(3):17-20.
Design and Simulation of Hydraulic System for Teleoperation Troweling Machine Based on AMESim
HUANG Zhihui,JIANG Junchao,LIAO Xianghua
(College of Mechanical and Electrical Engineering,Central South University,Changsha Hunan 410083,China)
The drivemechanism of double plate trowelingmachinewas analyzed.The structural componentand operation principle about the trowelingmachine hydraulic system were studied.Simulation model of troweling machine hydraulic system was established based on AMESim platform.The simulation results show that the hydraulic system canmeet the setting of simulation working condition,which has a valuable reference to the system design and optimization.
Trowelingmachine;Hydraulic modeling;Simulation;AMESim software
TH137
A
1001-3881(2015)21-179-4
10.3969/j.issn.1001 -3881.2015.21.044
2014-09-12
黄志辉 (1952—),男,硕士,教授,从事机械自动化技术、精密测试与控制及工程机械装备研究。E-mail:JJChao1120@.com。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
花火·绘阅读(2021年2期)2021-09-10
冶金设备(2020年2期)2020-12-28
雪豆月读·高年级(2020年7期)2020-09-10
重型机械(2020年2期)2020-07-24
儿童时代·快乐苗苗(2018年6期)2018-09-03
小学生导刊(2017年15期)2017-05-17
棋艺(2016年4期)2016-09-20
中国塑料(2016年3期)2016-06-15
石油化工建设(2015年6期)2015-12-01
