
基于HMM的导航设备故障状态识别模型研究
2015-03-05 05:37:46北航信息化处韩荣旺海军航空工程学院青岛校区田沿平
电子世界 2015年19期
北航信息化处 韩荣旺海军航空工程学院青岛校区 田沿平 周 鹏
基于HMM的导航设备故障状态识别模型研究
北航信息化处 韩荣旺
海军航空工程学院青岛校区 田沿平 周 鹏
【摘要】针对导航设备结构复杂,故障发生频繁,故障类型难判断的特点,本文提出了基于状态维修(CBM)的隐马尔可夫模型(HMM)故障状态识别方法。首先通过灵敏度分析法确定导航设备的电路中发生变化最明显的元件,通过改变元件参数来设置电路的不同故障状态;其次对采集到的工作状态数据进行线性判别分析(LDA),并建立导航设备故障状态识别模型;最后对导航设备故障进行状态识别。结果表明,本文提出的方法能够对导航设备电路不同故障状态进行状态识别,状态识别率可以达到94%。
【关键词】状态维修;HMM;LDA;状态识别
引言
随着电子技术的高速发展,设备的复杂化、集成化程度越来越高,发生故障的频率随之增加,对维修技术提出了更高的要求,若能够根据设备的实际运行状态信息来确定设备是否需要进行维修,不但延长设备使用时间,提高维修活动的有效性,更能保证设备能够安全运行。
隐马尔可夫模型(HMM)是一种用参数来表示随机过程的概率模型[1]。常用于电子装备故障识别。状态维修(Condition Based Maintenance,CBM)技术是将传感器安装在设备内部或者将检测设备接在设备外部,获得系统当前时刻的状态信息,进而评价设备当前所处的运行状态[2],用于设备状态识别、故障诊断和故障预测等。
1 状态识别检测机理
1.1 基于LDA特征提取
线性判别分析(LDA)采用Fisher准则,通过选择一个极大值的向量,将其作为最佳投影方向,再将样本投影使其类内散度达到最小,同时类间散度达到最大,使得投影后的不同类别样本尽可能的分离,达到初步的分类效果[3]。
定义C为类别数,则类内散度矩阵为:
Pj为先验概率,mj为cj的均值,Nj为Cj的样本数。
则类间散度矩阵为:

Pj为先验概率,mj为Cj的均值,m为全部样本的均值。样本投影变换矩阵:


用于评价离散度的Fisher准则为:

当J(Wopt)取最大值时与之相对应的投影矩阵即为所求。
LDA作为一种广泛的特征提取技术,不但有效的实现了降维,而且同时还可以获得最佳的分类效果,使得用于状态识别的特征更具有代表性。
1.2 HMM基本原理
HMM是一种描述双内嵌式随机过程统计特性的概率模型,一个HMM具有五个基本参数:N:模型状态总数,M:可能的观测值数目,A:状态转移概率矩阵。B:观测值概率矩阵。:初始状态概率矩阵一个HMM可描述为:,可简写为。
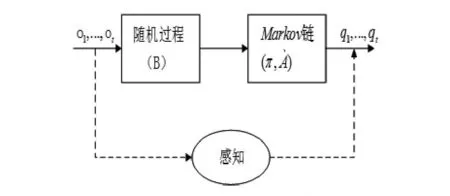
图1 HMM的基本原理
HMM主要解决3个基本问题[4]:估计问题、解码问题和学习问题。HMM基本原理如图1所示。
2 建立导航设备的状态识别模型
导航设备主要是为飞机提供方位、距离、下滑角度等状态信息,关系到飞机飞行和着陆的安全,因此导航设备的工作状态对飞机来说是十分重要的。通常导航设备可以分成发射机、频率合成器、接收机、功率合成、控制部件、电源组件、调制解调部件等众多的组成部分,在进行故障分析和状态识别时,建立的模型比较复杂,但可以将这些部件看成相互交织的串并联单元,逐级建立状态模型进行分析。
建立导航装备状态识别模型可以分为4个步骤:
(1)数据采集。通过传感器获得设备的状态信号。
(2)数据处理。首先对获得的状态信号进行预处理,保留信号的有用信息,再通过LDA进行特征提取,将样本数据分为训练和测试样本,并将其组成HMM模型所需的观测序列。
(3)模型训练。首先设置初始模型参数,将各状态的训练序列输入模型中,再通过不断训练模型和对模型参数的修正,最终获得各状态模型:HMM1、HMM2…HMMn。
(4)状态识别。将要进行状态识别的数据组成观测序列,输入到训练好的各状态模型中,分别计算各模型产生该观测序列的概率,根据最大似然概率值即可判断当前观测序列代表的设备状态。

图2 Sallen-Key带通滤波器
3 实验仿真与结果分析
3.1 数据采集
由于导航设备的状态数据很难获得,对整个导航设备的故障状态识别可以从一个类似的模拟电路故障状态识别出发,本文以图2所示的Sallen-Key带通滤波器为例,采用PSPICE软件对该电路进行分析仿真,来获得导航设备的不同状态数据。
信号源是PSPICE中的VAC模型,幅值2V,幅角00,所有R的容差为±10%,C的容差为±5%。对电路进行灵敏度分析,发现C2取不同值对输出电压V(V0)的波形影响最大,如图3所示。

图3 电路输出响应
因此本文只考虑C2的变化对整个电路系统的影响,以V0作为测试点,对该电路进行频率响应分析。设C2的容差变化范围每增加5%对应一种故障状态,加上正常状态共设置了10种状态,分别对得到的每种状态进行50次蒙特卡罗分析,图4为正常状态仿真结果。
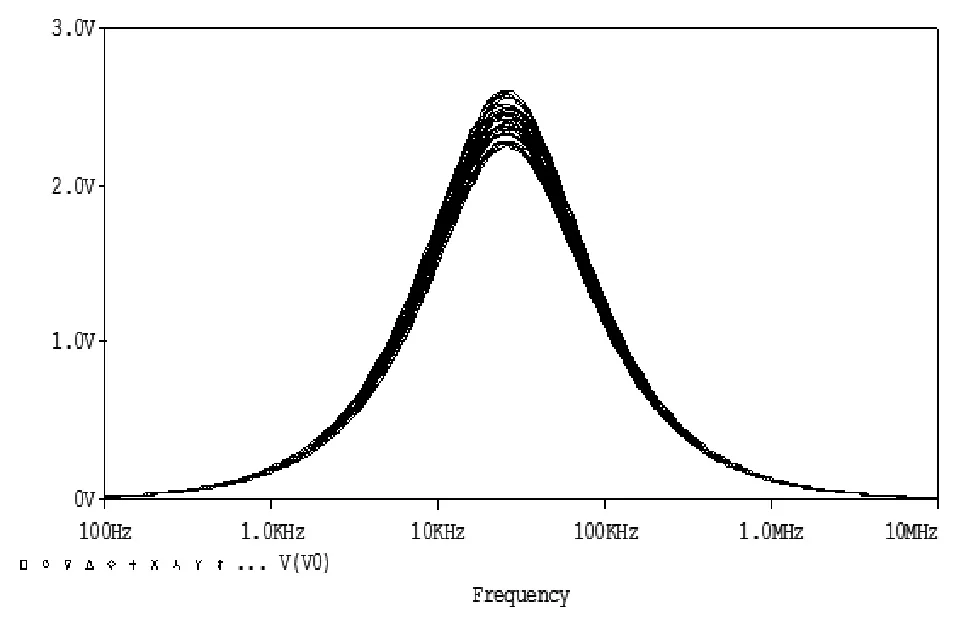
图4 蒙特卡罗分析
结合图3和图4发现C2在25KHz~300KHz之间的变化对电路的影响最为明显,因此分别对每个状态取10KHz、25KHz、50KHz、80KHz、100KHz、150KHz、200KHz、250KHz、300KHz、400KHz对应的10个频响电压幅值构成一个10维电压特征向量,作为原始特征向量。其中每种状态有50组特征向量,30组作为训练样本,20组作为测试样本,从每组样本中随机取5组构成一个HMM模型观测序列。
3.2 数据处理
为提高仿真数据的针对性、减小非关键数据的影响,对采集到的数据进行LDA降维,结果如图5所示。

图5 各属性在LDA降维后的贡献率
从图5中可以看出通过LDA处理后前五个属性的累计贡献率可以达到95%,因此将10维电压特征向量可降为5维作为模型输入的样本数据。
3.3 模型训练
HMM模型设置:隐状态数5,高斯元个数3,初始状态概率矩阵[1,0,0,0,0],状态转移概率矩阵[0.5,0.5,0,0,0;0, 0.5,0.5,0,0;0,0,0.5,0.5,0;0,0,0,0.5,0.5;0,0,0,0,1],最大迭代步数25,收敛误差0.001,HMM结构为左右型。将每种状态用于训练的观测序列输入模型中,得到各状态的训练迭代图,纵坐标为对数似然概率值,如图6所示。

图6 10种状态的HMM训练迭代过程
从图6中可以看出,在训练过程中随着迭代步数的增加,各状态的对数似然概率值都在设置的最大迭代步数前达到了收敛,并且收敛的速度较快,证明了HMM的学习能力很强。
3.4 状态识别
通过对训练样本进行训练得到了10种状态的HMM模型,将20组测试用的观测序列输入HMM模型中进行状态识别,结果如表1所示。从表1中可以看出HMM进行状态识别效果较好,平均识别率达到了94%。从维修角度考虑,这样判断的结果是提前对系统进行维修,同样可以降低维修费用,并保证系统的安全运行。
4 结论
为解决导航设备故障识别困难,现有故障识别方法无法给出故障状态等问题,本文提出了隐马尔可夫模型(HMM)故障状态识别方法,通过对一个具有串并联结构的模拟电路进行故障状态识别来实现对导航设备的故障状态识别,识别效果较好,为状态维修提供了可靠的理论依据。

表1 10种状态的测试结果
参考文献
[1]张继军,马登武,王琳.基于改进HMM的模拟电路早期故障识别和诊断[J].计算机工程与应用,2014,50(3):261-264.
[2]冯辅周,司爱威,江鹏程.小波相关排列熵和HMM在故障预测中的应用[J].振动工程学报.2013, 26(2): 269-275.
[3]王海珍.基于LDA的人脸识别技术研究[D].西安:西安电子科技大学,2010.
[4]黄景德,郝学良,黄义.基于改进HMM的潜在电子故障状态识别模型[J].仪器仪表学报,2011,32(11):2481-248.
韩荣旺(1979—),中国石油大学通信工程专业本科毕业,机场通信导航管理维护工作。
作者简介:
