CTCS3-300T列控车载设备测速测距抗干扰的研究
2015-03-03 07:59贾云光
铁路通信信号工程技术 2015年2期
贾云光
(北京全路通信信号研究设计院有限公司,北京 100073)
CTCS3-300T列控车载设备测速测距抗干扰的研究
贾云光
(北京全路通信信号研究设计院有限公司,北京 100073)
重点针对CTCS3-300T列控车载设备在列车运营当中存在测速测距受到干扰时导致停车的问题进行分析及现场测试,从理论上进行验证,并据此提出可行的解决措施。
CTCS3-300T;ATP;测速测距;ODO无服务;受电弓
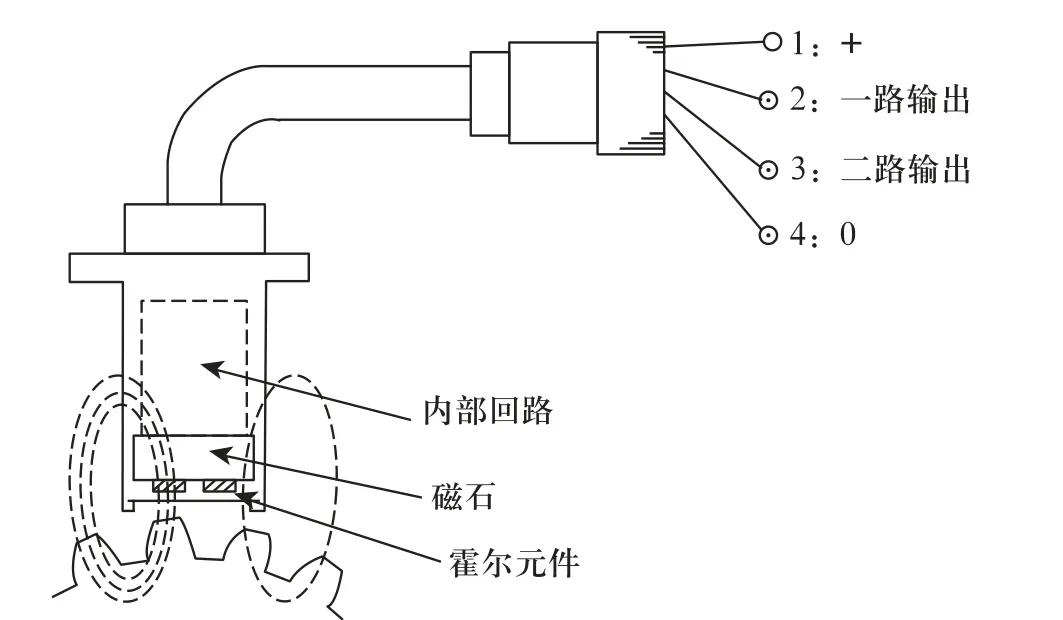
图1 速度传感器测速原理示意图
1 背景介绍
测速测距单元在ATP系统中起着至关重要的作用,主要用于精确测量列车的速度,是ATP设备进行列车安全防护的基础,为了保证速度的可靠性,在CTCS3-300T设备中安装2套速度传感器和雷达,这2套设备分别安装于车体和车辆转向架上。由于高速动车电磁环境的复杂性,使得列车在运行到某些场合时,出现2套速度传感器同时测速故障,导致列车停车,从而对运营产生影响,因此,解决好测速测距的干扰问题至关重要。
2 原理介绍
CTCS3-300T车载设备使用2个双通道霍尔速度传感器进行测速。速度传感器安装于轮轴的测速端盖上,通过齿轮齿隙变化引起磁场强度的变化产生脉冲来计算列车运行速度,如图1所示。
为了实现霍尔传感器对速度方向的判断,霍尔速度传感器的测速探头安装2个霍尔元件,用于产生两路脉冲,由于2个霍尔元件分别安装在速度传感器探头的两个位置,因此,2个霍尔元件产生的脉冲会因齿轮的旋转方向而产生相位差。制造时,通过合理放置霍尔元件可以使得2个霍尔元件的输出脉冲产生90°的相位差。如图2所示,当脉冲超前于90°时,方向为正向;反之为反向。正常情况下,两路转速脉冲相位差为90°。
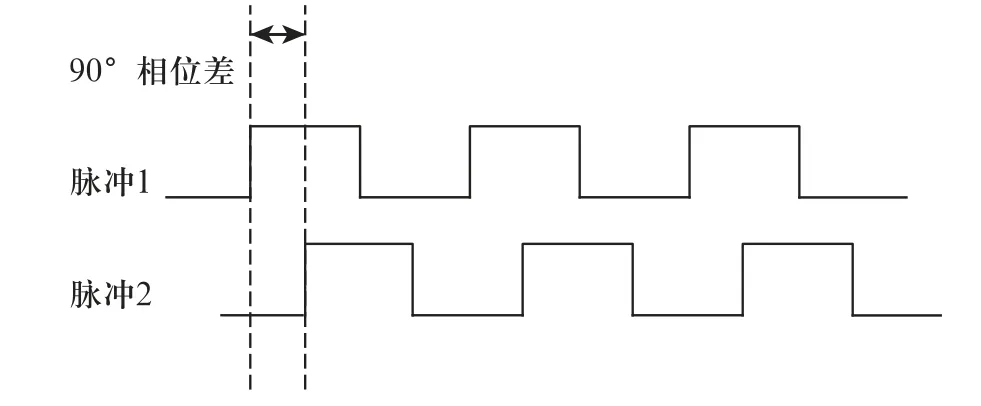
图2 速度信号相位差
速度传感器将获得的脉冲发送至SDU单元,处理后转换为16进制数据发给SDP模块。
ATP根据每个速度传感器的2个通道中信号的相位差来判断列车运行方向。当2路SDU同时故障、2台速度传感器同时故障或者2台速度传感器同时受到干扰导致其信号不可用时,ATP车载无法判断列车运行方向,就会报告ODO无服务故障,导致ATP故障停车。
CTCS3-300T车载的测速测距子系统结构如图3所示。

图3 ATP测速差距系统结构图
3 故障原因分析及查找
3.1 故障原因
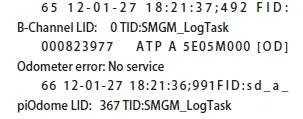
下边log语句为测速测距故障导致停车时的故障语句,其中“Q_ODOSAFE report NOSERVICE”表示测速不可用。

发生ODO无服务故障主要原因:1)SDU单元受到干扰;
2)速度传感器本身有问题;
3)SDU检测来自速度传感器的输入脉冲(PLD1+PLD2)有大量的噪音,导致2个SDU单元同时报告无效的方向超过1s,此时ATP信息不够安全,因此会导致ATP停车。
鉴于大部分ODO故障在重启ATP后消失,因此可以排除速度传感器本身故障导致的问题。因此,外部环境的干扰是导致速度传感器ODO无服务故障的原因。
3.2 案例分析
为了找到ODO干扰的途径及原因,对ODO故障发生时的特点及周边因素进行综合考虑,最终发现ODO无服务故障主要跟司机使用受电弓的情况及列车运行的区段有关系,表1所示为某段时间内选取的ODO故障典型案例。
图4显示为某次ODO故障时,当时列车正通过分相区,且受电弓采用前弓运行。
图4中,OLV_out_Vol表示列车弓网电压的波动,脉冲形式表示列车正在使用前弓运行,MainCBOff表示列车当前处于断开主断,正处于分相区处。

表1 某段时间ODO无服务故障典型案例
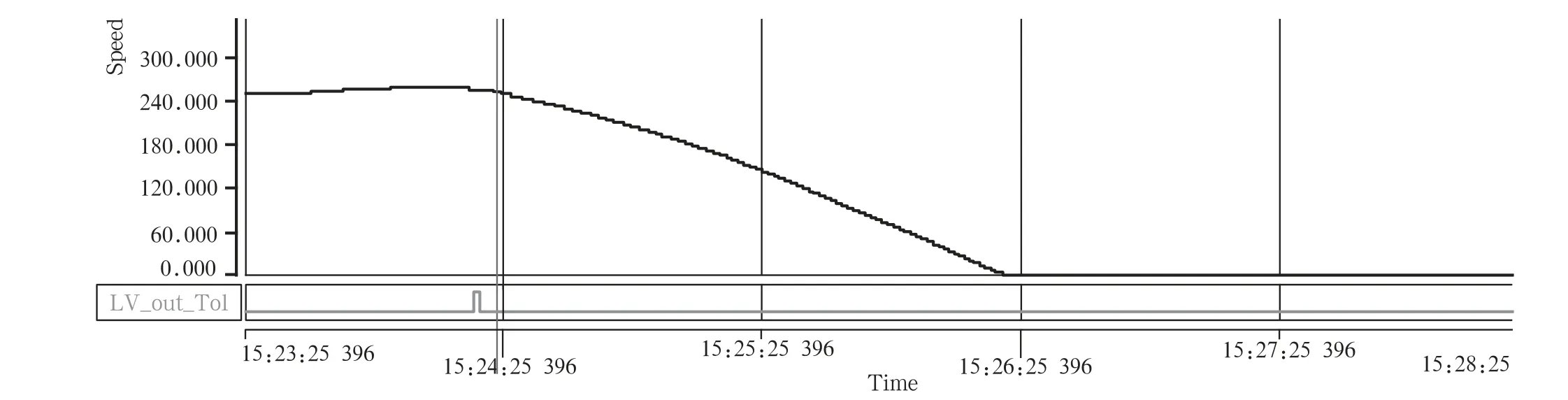
图4 JRU分析记录截图
3.3 现场测试
为了进一步确认速度传感器故障与受电弓状态及分相区的关系,对现场频发故障的CRH3-3062动车进行了测试,并对波形进行了记录。
3.3.1 测试内容
1)高速动车组使用前弓(车辆受电弓)运行,列车过分相时,速度传感器的受干扰情况,连续测量3个分相区。
2)该车使用后弓运行,并通过3个分相区时,故障的发生情况。
3.3.2 测试结果
1)干扰情况
通过现场车辆的测试发现,在列车前弓运行过分相时,速度传感存在明显干扰,如图5所示。

图5 波形记录器显示ODO无服务时的干扰情况
2)使用前弓和后弓过分相的对比分析
司机使用前弓经过分相区时,均发生ODO无服务故障;在改用后弓运行时,未发生ODO无服务故障。表2所示为3062车在广州—韶关分别使用前弓运行和后弓运行且通过分相区时故障情况。
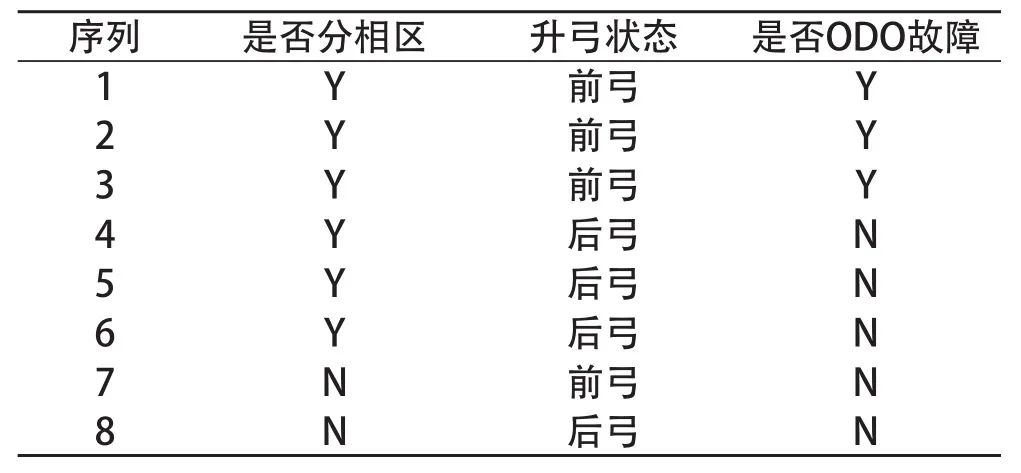
表2 使用前弓和后弓过分相区时ODO故障情况
从以上测试确定了ODO无服务故障与车辆受电弓的状态及分相区的关系。
4 理论分析
为了进一步研究车辆升前弓与升后弓的区别,将车辆的受电弓到车轮接地进行研究,找到两者的差别,为进一步的措施找到依据。
4.1 受电弓电路模型
车辆前受电弓、后受电弓简化的电路如图6所示。在前受电弓工作时,后受电弓不工作;在后受电弓工作时,前受电弓不工作。每个受电弓升弓受电时,均通过4个车轮接地。
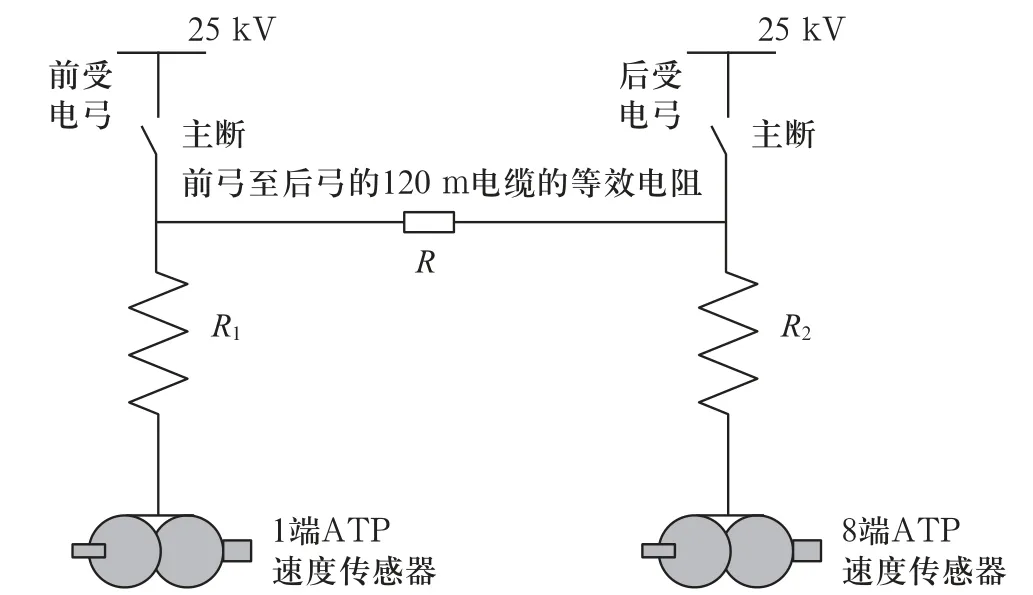
图6 车辆受电弓接地模型图
使用1端ATP工作时,对应为2车的速度传感器;使用8端ATP时,对应为7车的速度传感器。
本节均假设使用1端ATP,司机室为1端占用。则2车的受电弓为前弓,7车的受电弓为后弓。
4.2 等效电路模型
上述受电弓电路模型可以简化为如图7所示电路模型,本电路模型只做简化计算,为故障查找提供定型分析,因此忽略了电感电容的影响。
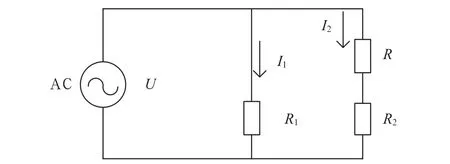
图7 车辆受电弓简化模型电路
假设通过前弓的电流为I1,通过后弓的电流为
I2。
4.3 计算分析

I1为流过前弓的电流。
由于两车电缆、牵引变压器等设备相同,电路中R1=R2;
可以得出:


因此可以看到,在不考虑电路电感及电容因素的情况下,前弓通过的电流大于后弓的电流。
在考虑瞬态情况下,其通过的电流也高于后弓通过的电流,其所造成的干扰会大于后弓所产生的干扰。
从上述中可以看出,当R越大时,I1越大,所造成的瞬间干扰越大,由于R为从2车到7车将近120m长电缆组成,其中包含若干接插件。任何瞬间的接触不良都有可能造成R的增加[1,2,3]。
5 解决措施
根据电磁兼容理论,电磁干扰的3要素是:电磁干扰源、耦合途径及敏感设备[4,5],因此解决电磁兼容问题只能从这3个方面入手。
1)提高敏感设备的抗干扰能力;
2)切断耦合路径;
3)降低干扰源的噪声。
在本次问题研究中,速度传感器为敏感设备,干扰源为受电弓引起的接地回流,耦合路径为空间干扰。
5.1 提高速度传感器抗干扰能力
提高速度传感器的抗干扰能力,为此选择了干扰能力更强的B型速度传感器,并通过现场对比测试确认了新B型速度传感器抗干扰能力好于既有的A型速度传感器,如图8、9所示。
5.2 变更速度传感器安装位置
通过将速度传感器安装在远离接地回流单元的轴端可以切断干扰路径,并且远离干扰源。目前,该措施已经在新出厂的CRH380B型车上进行试验安装,到目前为止未出现该故障。
如图10所示,右图为速度传感器的既有安装位置,左图为没有接地回流线的安装位置。
5.3 尽量使用后弓运行
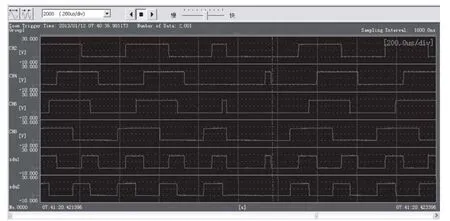
图8 既有速度传感器过分相时的波形
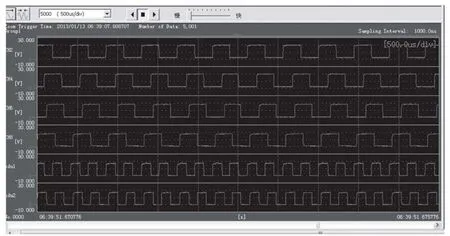
图9 换型后速度传感器过分相时的波形图

图10 更换位置前后接地回流线回流对比
为了降低干扰源的干扰,在列车运行过程中,通过使用后弓运行可有效降低ATP的ODO无服务的故障。
6 总结
通过对速度传感器原理的分析及现场测试,找出导致ODO无服务故障的原因及干扰源。同时,根据对干扰源进行模型化的理论分析,确认了升前弓导致测速差距故障的原因,并据此提出一些可行的措施,且进行了验证。
[1] 霍宏艳.高速动车电磁骚扰源建模仿真分析[D].北京:北京交通大学,2010.
[2] 姜东杰.CRH3型车动车牵引传动系统[J].铁道机车车辆,2008,28(增1):95-100.
[3] 聂颖.高速动车组升弓浪涌过电压研究[J].机车电传动,2013(4):9-11.
[4] 杨克俊.电磁兼容原理与设计技术[M].2版.北京:人民邮电出版社,2011.
[5] Clayton R.Paul.电磁兼容导论[M].闻映红,等译.北京:机械工业出版社,2006.
Due to interference to the speed and distance measuring unit of CTCS-300T onboard equipment, the train will brake. For solving the problem of interference, the paper presents the analysis and fi eld testing contents with theoretical verifi cation, and puts forward the feasible measures based on the analysis and testing.
CTCS3-300T; ATP; speed and distance measuring; ODO without service; pantograph
10.3969/j.issn.1673-4440.2015.02.002
2014-04-30)
铁道部科技研究开发计划(BK-2012X001)
猜你喜欢
铁道机车车辆(2022年1期)2022-03-24
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
铁道学报(2020年8期)2020-09-07
全球定位系统(2020年1期)2020-03-31
电子制作(2017年10期)2017-04-18
山东工业技术(2016年15期)2016-12-01
中国交通信息化(2016年5期)2016-06-06
太空探索(2015年6期)2015-07-12
航天电子对抗(2014年2期)2014-07-11