
直流电动机串电阻起动的设计与仿真
2015-03-02 07:54:12王晓旭
邢台学院学报 2015年4期
王晓旭
(邢台学院物理与电子工程学院,河北邢台 054001)
直流电动机串电阻起动的设计与仿真
王晓旭
(邢台学院物理与电子工程学院,河北邢台 054001)
传统的直流电动机串电阻起动参数设计采用解析法理论计算,公式复杂,步骤繁琐,且计算结果需要进一步通过仿真来验证。采用Matlab仿真进行电阻起动器的设计,转速、电流动态仿真波形为参数的计算提供了重要的理论依据,设计过程简单省时,精度高,参数调整方便,设计效果同时可通过仿真波形实时显示。
直流电动机;起动电阻;Matlab;仿真
直流电动机直接起动起动电流一般为额定电流的十倍以上,换向会产生危险的电火花,并且起动转矩过大也会造成电机机械机构及负载的损坏,因此除小功率直流电动机允许直接起动外,大功率直流电动机需采用降低电枢电压或电枢回路串电阻起动。直流电动机串电阻分级起动,可把起动电流限制在一定范围内,在最大电流的限制下快速且较平滑起动,起动性能与起动级数、各级起动电阻的大小及其投入时间密切相关。
本文首先利用解析法进行直流电动机电阻起动器的设计,然后重点介绍在Matlab/simulink中利用仿真手段进行起动器设计的方法步骤。
1 直流电动机串电阻起动解析法设计
一台他励直流电动机,额定电压UN=240V,额定电流IN=16.2A,额定转速nN=1 220r/min,电枢回路电阻Ra=0.6Ω,电枢电感La=0.012H,励磁电阻Rf=240Ω,励磁电感Lf=120H,系统转动惯量J=1Kg m2,负载为额定负载。
1.1 起动级数与各级起动电阻值的确定
他励直流电动机分级起动的原理及特性(以二级起动为例),如图1和图2[1]。
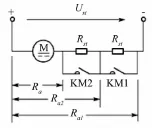
图1 分级起动电路图
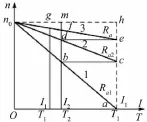
图2 分级起动特性
起动之初KM1、KM2断开,将起动电阻全部串入电枢回路,待转速上升后,逐步将KM1、KM2闭合,起动电阻RST2、RST1切除,起动过程电流限制在I1、I2之间。根据起动级数和各级起动电阻计算公式[1],有起动级数
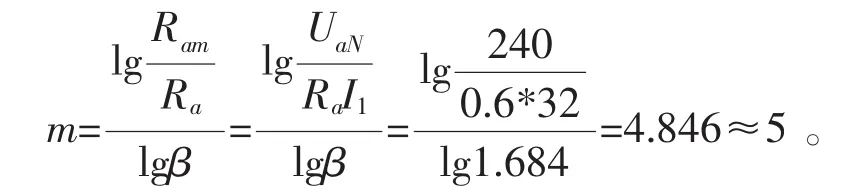
由于m近似取整,因此需验证,

I2=起动级数m=5符合要求。
各级起动电阻值:
RST1=(β-1)Ra=(1.6572-1)*0.6=0.3943Ω,
RST2=βRST1=0.6534Ω,
RST3=βRST2=1.0828Ω,
RST4=βRST3=1.7944Ω,
RST5=βRST4=2.9737Ω。
1.2 各级电阻切除时间的确定
他励直流电动机电枢串多级电阻起动的过渡过程(以二级起动为例),如图3和图4[1]。根据各级起动时间的计算公式Iz——负载电流;

TtMx——各级起动时电力系统机电时间常数,Rx为各级起动电枢回路总电阻[2]。
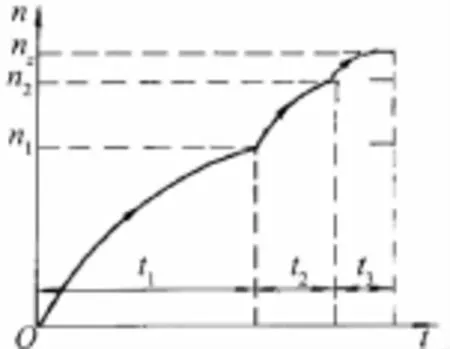
图3 转速变化曲线

图4 电流变化曲线
CeΦ,GD2=4 gJ=39.2 N.m2,故TtM1=2.3026s, TtM2=1.3895s, TtM3=0.8399s, TtM4= 0.5074s,TtM5=0.3067s;t1=3.9844s,t2=2.4044s,t3=1.4534s,t4=0.8780s,t5=0.5307s。因此,RST1、RST2、RST3、RST4、RST5的切除时间分别为:9.2509s,8.7202s,7.8422s,6.3888s、3.9844s。
2 解析法设计结果仿真
在Matlab/simulink中建立他励直流电动机电枢串联五级电阻起动的仿真模型[3],如图5所示。仿真其起动过渡过程,获得转速-电流关系曲线及转速、电枢电流、励磁电流和电磁转矩的变化曲线,如图6所示。
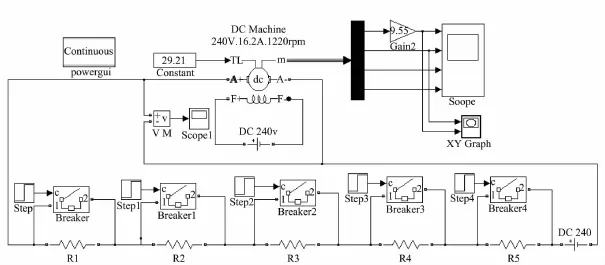
图5 直流电动机串电阻起动仿真模型
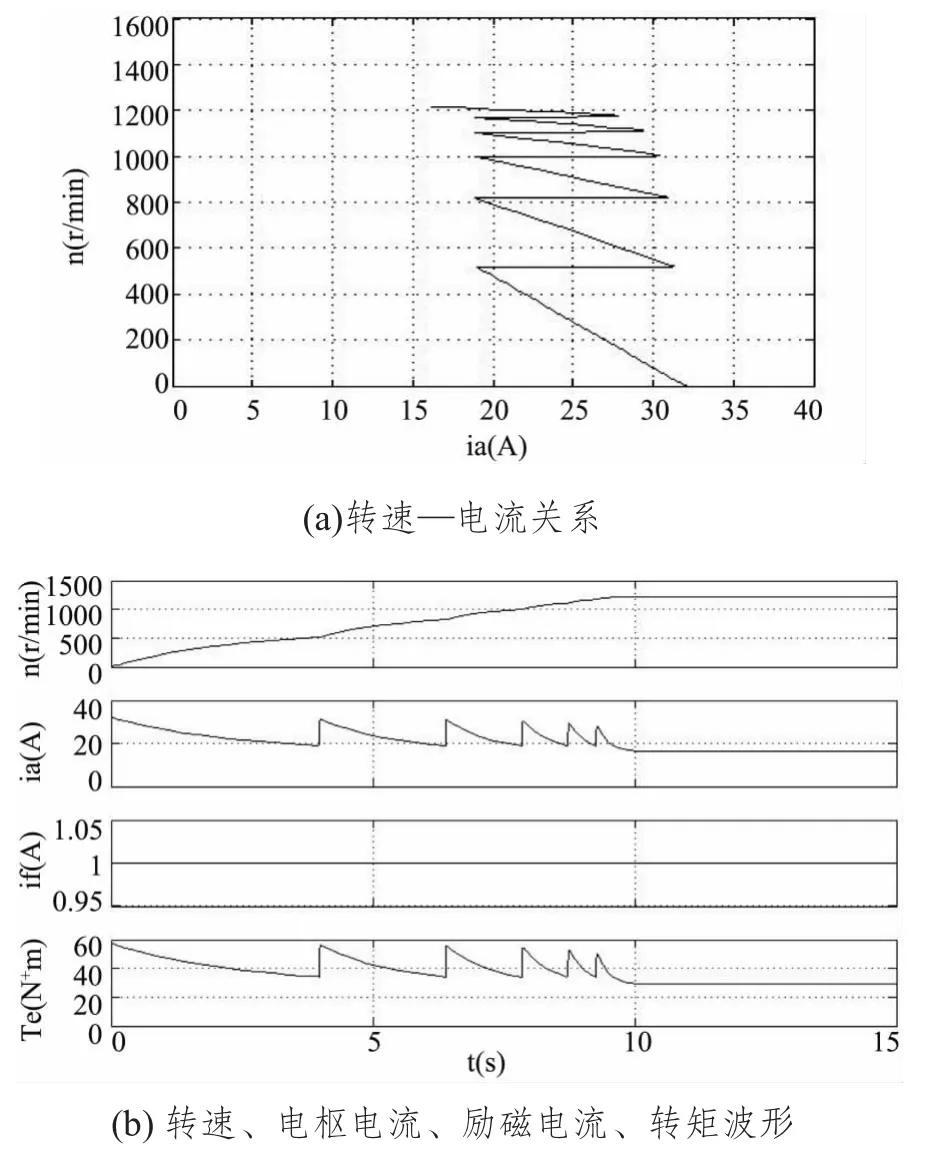
图6 五级起动仿真波形
由仿真波形可以看出,整个起动过程电流处于起动电流和切换电流之间,较大的转矩保证了起动的快速性,直至最后一级电阻切除后达到额定负载电流,转速达到额定转速。因此解析法理论设计合理。
3 直流电动机串电阻起动Matlab仿真设计
选择与解析法设计相同的起切电流值和起动级数,利用Matlab/simulink仿真方法进行各级起动电阻值和运行时间的确定。直流电动机串电阻起动仿真设计模型同图5,起动电阻设计方法如下。
(1) 将Step模块的阶跃信号发生时刻设为15 s,其余Step1~Step4设为“0”,这样起动时电阻器仅有R1接入电枢回路[4],根据起动电流I1= 32A,初选R1′阻值。

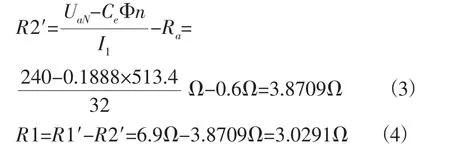
预设参数R1=R1′=6.9Ω,得到串一级电阻起动时的仿真波形,如图7(a)所示。由图中可以看到起动电流为32A,而当电流下降到I1=19A时,t=4.025s,转速约为513.4 r/min。转速低于额定转速,增大转矩继续加速,使I=I1,需进一步减小起动电阻。据此确定R1的阻值与R2的预设值R2′[5]。
修改模型参数R1=3.0291,R2=R2′=3.8709, Step信号发生时间为4.025s,Step1为15s,得到串二级电阻并切除一级电阻时的仿真波形,如图7(b)所示。
(2) 由图7(b)可以看到电流下降到I1= 19A时,t=6.423s,转速约为818.8r/min。据此确定R2的阻值与R3的预设值R3′。
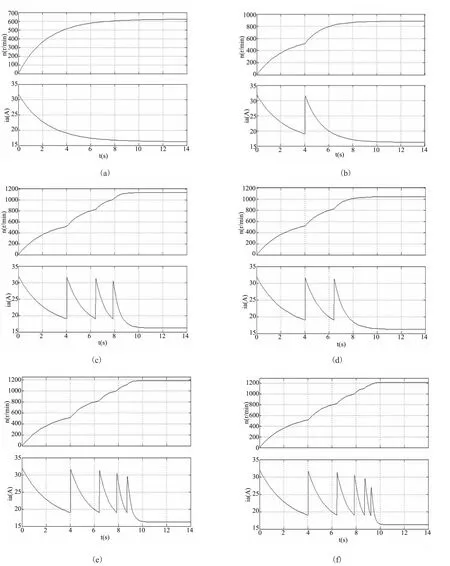
图7 串电阻分级起动时的转速和电枢电流波形
修改模型参数R2=1.8018,R3=R3′=2.0691,Step1信号发生时间为6.423s,Step2为15s,得到串三级电阻并切除一、二级电阻时的仿真波形,如图7(c)所示。
(3)由图7(c)可以看到电流下降到I1=19A时,t=7.857s,转速约为1000.5r/min。据此确定R3的阻值与R4的预设值R4′。
修改模型参数R3=1.072,R4=R4′=0.9971,Step2信号发生时间为7.857s,Step3为15s,得到串四级电阻并切除一、二、三级电阻时的仿真波形,如图7(d)所示。
(4)由图7(d)可以看到电流下降到I1=19A时,t=8.709s,转速约为1108.7r/min。据此确定R4的阻值与R5的预设值R5′。
修改模型参数R4=0.6384,R5=R5′=0.3587,Step3信号发生时间为8.709s,Step4为15s,得到串五级电阻并切除一、二、三、四级电阻时的仿真波形,如图7(e)所示。
(5)由图7(e)可以看到电流下降到I1=19A时,t=9.2284s,此时切除R5。转速大约在10s时达到额定转速1220r/min,如图7(f)。
该设计方法参数计算与仿真同时进行,由图7可以看出,通过设置合适的各级起动电阻值和切除时间,起动电流可以限制在一定的范围之内,转速较快且较平滑的达到额定转速。设计结果满足设计要求。
由上述分析可以看出,两种设计方法的设计结果均满足直流电动机起动要求。直流电动机串电阻分级起动的解析法设计计算复杂,公式繁多,关于各级串联电阻值及其切除时间公式的理论推导过程较难,通过Matlab仿真可以验证该设计结果的正确性。利用Matlab仿真辅助电阻起动器参数设计大大降低了对起动过渡过程深入理解的要求,避免了对复杂公式的运用,只需建立系统仿真模型,动态响应曲线为设计提供可靠的参考数据,仿真与简单计算相结合,即可获得较为满意的设计结果,并且在仿真设计过程中,参数的设计是逐级进行并实时显示起动效果的,该设计方法简单省时,通用性好,直流电动机起动性能良好。
[1]顾绳谷.电机及拖动基础(第4版)[M].北京:机械工业出版社,2011.
[2]吴云,康晓军.他励直流,电动机电枢串电阻起动过程的分析和MATLAB仿真 [A].2008系统仿真技术及其应用学术会议论文集 [C].北京:中国科学技术大学出版社, 2008.382-385.
[3]刘凤春.电机与拖动MATLAB仿真与学习指导[M].北京:机械工业出版社,2008.
[4]谢海良,王爱花.直流电动机电阻起动器仿真设计[J].机电产品开发与创新,2009,22(05):51-52,54.
[5]汪明先.基于MATLAB的直流电动机启动的仿真研究[J].电子技术,2013,(07):7-9.
TP2
A
1672-4658(2015)04-0168-04
2015-07-08
邢台学院教改课题:仿真技术在自动化专业教学中的应用研究.课题编号:JGY13004
王晓旭(1984-),女,河北河间市人,讲师,硕士研究生,主要从事自动化专业教学.
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23 00:33:39
火力与指挥控制(2022年5期)2022-07-25 03:50:10
北京第二外国语学院学报(2021年2期)2021-08-13 08:34:34
中国特种设备安全(2021年9期)2021-03-02 05:40:46
弹箭与制导学报(2020年1期)2020-07-09 10:52:00
弹箭与制导学报(2019年6期)2019-06-24 08:40:20
测控技术(2018年2期)2018-12-09 09:00:46
通信电源技术(2016年3期)2016-03-26 07:13:14
防灾减灾学报(2015年3期)2015-12-16 16:15:40
共产党员(辽宁)(2015年6期)2015-06-07 02:08:50
