滚针摆动弹流润滑试验机设计
2015-03-01 11:33宋伟娜陈晓阳孙殿超王志坚
机械制造与自动化 2015年2期
关键词:试验机
宋伟娜,陈晓阳,孙殿超,王志坚
(上海大学 机电工程与自动化学院,上海 200072)

滚针摆动弹流润滑试验机设计
宋伟娜,陈晓阳,孙殿超,王志坚
(上海大学 机电工程与自动化学院,上海 200072)
摘要:针对低速摆动工况,设计了一种可测量大长径比滚针弹流润滑油膜的试验机。介绍了试验机的工作原理及其机械结构、光学系统、传动机构和加载系统的设计。为在滚针非匀速运动过程中的部分行程段实现匀速运动状态,特设计了阿基米德螺线扩展曲线的凸轮轮廓,并经运动学仿真证明了该想法的可行性,从而扩大了试验机的测量功能。
关键词:大长径比;滚针;试验机;匀速运动
0引言
有限长线接触是弹性流体动力润滑学科的一部分,开发可行的线接触试验装置和测量方法对于完善弹流润滑理论体系有着重要意义。轴承滚针具有长径比较大的特点,这是其与常规滚子的主要区别,这一特点决定了滚针运转时更易发生偏斜。滚针润滑表面所处的工况条件不断变化必然会引起油膜的动态效应,进而使得油膜的接触应力分布和油膜形状等特性不同,而目前还未看到相关方面的研究,因此研究滚针等大长径比线接触的弹流是很有必要的。
对弹流油膜的试验研究主要采用光干涉法,但由于光干涉法必须采用透明材料,而已有弹流试验机所用透明材料的机械性能与金属材料相差甚远,如前者的弹性模量仅是后者的一半,只有70MPa左右,[1,3,4]这就限制了模拟实际工况时的载荷,所以很难用于模拟实际的机械零件的情况。试验机采用人造蓝宝石作为试验中的透明材料,由于人造蓝宝石具有与钢相接近的综合弹性模量和传热性能[1],所以这将有利于试验在接近实际工况特别是接近实际的高接触应力下进行,使得所测结果更接近实际。
1试验原理[2]
光弹流系统有四种介质:玻璃、铬膜、油膜、滚针。光干涉试验原理图如图1所示。

图1 光干涉试验原理图
根据波动光学理论,当两束相干光在某一位置相遇时会发生干涉现象。在光干涉系统中,当光束入射时,一部分光在铬膜表面发生反射形成光束1,另一部分光透过铬膜并穿过润滑油膜在滚针表面发生反射而形成光束2,两束光由于光程不同将产生干涉形成干涉图像。
当入射光为单色光,入射方向垂直于平面玻璃表面,假设油膜厚度为h,光在油膜中的波长为λ',则反射光束1、2的光程差h为:
Δ=2h+λ'/2
λ'/2是由于光波由光疏介质到光密介质并在光密介质面反射,进入光疏介质时产生附加光程差引起的。
两束反射光形成干涉的条件为:
Δ=2h+λ'/2=k0λ'k0=1,2,…亮条纹

滚动体与玻璃完全接触时,k0=0,为暗区;此时,第一个亮条纹处,k0=1,由上述公式算得膜厚;第一个暗条纹处,k0=1,由上述公式算得膜厚,依此类推可算得其他亮暗条纹处的膜厚。
由波动光学理论知,当光束1与光束2的光强相等时,干涉条纹最清晰。所镀铬膜的作用就是调节光束1与光束2之间光强的比例。
2试验台结构及设计
a) 试验台结构[5]
图2给出了所设计试验机的原理图。
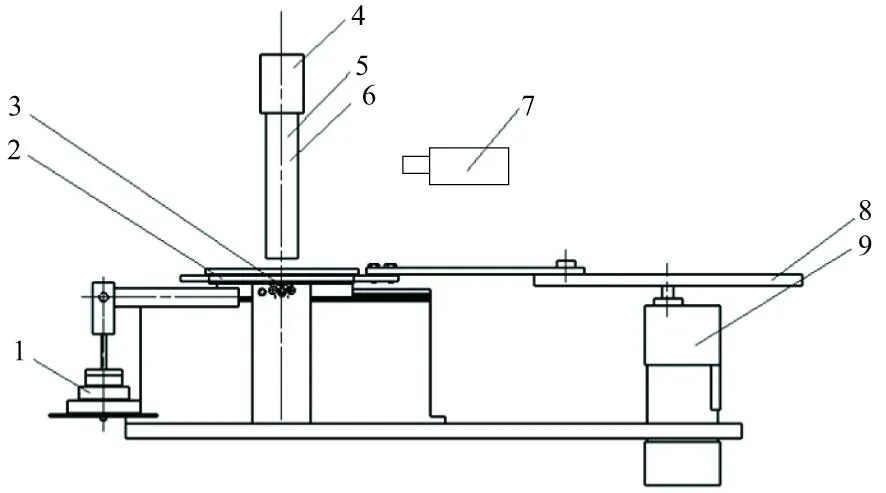
1—砝码;2—人造蓝宝石;3—试验滚针;4—CCD;5—显微镜;6—反射镜;7—光源;8—凸轮;9—电动机图2 试验机结构原理图
砝码1用来对试验进行加载,载荷经杠杆机构放大后经加载轮作用于试验滚针;人造蓝宝石2、试验滚针3、CCD4、显微镜5、反射镜6及光源7组成光学系统;凸轮8及电机9组成传动机构,电动机驱动凸轮运动,凸轮运动经连杆滑块传动后最终带动试验滚针做往复摆动运动。
试验机机械结构照片如图3所示。

图3 试验机机械结构照片
b) 光学系统设计[6]
为了消除光线照射引起油膜发热,试验机选用疝灯冷光源。为了使所得的干涉条纹清晰,在蓝宝石的下表面镀有一层铬膜[7],镀适当厚度的铬膜使得两束反射光的光强接近相等。所镀铬膜的技术要求为在波长600nm时,透射率为58%,反射率为18%。
由冷光源发射的平行光束经窄带滤光片滤光后成为中心波长为600nm的准单色光束,然后射到显微镜下的反射镜上,一部分光折转方向垂直向下透过人造蓝宝石,此部分光又分成两部分:1) 透过人造蓝宝石下表面的铬膜照射到试验滚针3表面上发生反射;2)直接在铬膜表面发生反射。两束反射光所形成的干涉条纹可以从显微镜5的目镜观察到,也可以通过CCD4将动态图像传输到电脑显示器上进行观察、处理及分析。
c)传动机构设计
试验机选用180W的电动机驱动凸轮转动,凸轮带动滑块做往复直线运动,进而带动玻璃材料做往复直线运动,在玻璃材料的带动下,滚针做往复摆动运动。
为了模拟滚针在匀速运动下的弹流润滑现象,设计了特定轮廓的凸轮。凸轮轮廓如图4所示。

图4 凸轮轮廓
θ1=47°及θ3=122°的角度内的凸轮轮廓为偏心圆弧,r1=154mm,r2=113mm,偏心距d1=89.5mm,d2=44mm,此两段曲线的轮廓带动玻璃运动所实现的运动可近似为匀加速直线运动,进而带动试验滚针做近似匀加速旋转运动;θ2=85°及θ4=85°的角度内为对称的阿基米德螺线扩展曲线,设凸轮半径为ρ,角度为θ,其公式为ρ=40θ-80,此曲线的轮廓带动玻璃运动实现匀速直线运动形式,进而带动试验滚针实现匀速旋转运动。
设驱动凸轮转动的电动机转速为ω,时间为t,则玻璃材料匀速运动段位移s计算公式为:
s=Δρ=40Δθ=40ωt
则速度计算公式为:
加速度计算公式为:
由上述公式可知玻璃材料实现了匀速运动,滚针在匀速运动的玻璃材料带动下做匀速旋转运动。
阿基米德螺线扩展曲线的原型为ρ=kθ+b,通过改变k、b的值可改变匀速运动的速度及行程。
令ω=10rad/s,通过运动仿真所得玻璃材料运动的加速度、位移及速度曲线如图5所示。

图5 玻璃运动规律仿真
由图可见,所设计凸轮使玻璃材料实现了匀速运动。
d)加载系统设计
线接触最大应力计算公式为:
则可推出:
(1)
对于钢制轴承,接触面的半宽可以近似表示为:
(2)
则由式(1)、式(2)可得:

(3)
最大赫兹接触应力设定为σmax=1GPa,滚针半径r1=2.15mm,玻璃平面半径为r2=,则曲率半径ρ1=1/2.15mm-1,ρ2=0,则∑ρ=1/2.15mm-1,滚针长度l=15mm,则可得到:
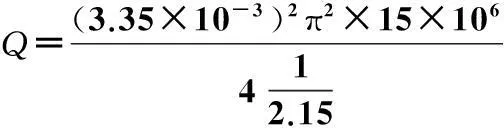
即滚针所受的力为893N,经计算传递到加载轮的力为233N,试验机加载系统采用砝码杠杆加载形式,杠杆的长度比例为1:8,则所需砝码重力为18N。
砝码加载处运用杆秤原理,保证了作用力的方向始终垂直向下。
e) 实验对象[8,9]
由式(3)可知,当∑ρ增大,即r1减少时,所受力Q减少,故选择直径较小的滚针作为实验对象可减少加载。受相对空间位置及零件受力强度的制约,试验滚针尺寸最终定为15mm×φ4.3mm,试验滚针可达到的极限直径范围为2.2-7.1mm,考虑接触干涉等,实际极限直径范围为4.3-6mm。在加载轮与试验滚针之间设计了两个陪试滚针,目的在于使试验滚针与玻璃之间的相对运动为纯滚动,并可减少由于滚针长度过长引起的偏载。其相对位置关系如图6所示。
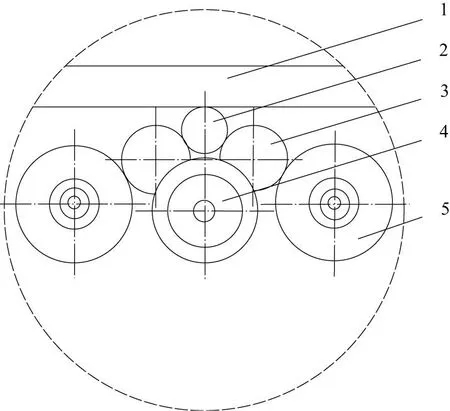
1—人造蓝宝石;2—试验滚针;3—陪试滚针;4—加载轮;5—支撑轮图6 实现纯滚动原理图
4结语
运用光干涉法,利用人造蓝宝石具有与钢相接近的综合弹性模量的特点,在低速滚动工况下,研制了一台可近似模拟大长径比滚针实际工况的弹流润滑试验机,结构简单、实用性强、容易操作,可对一定直径范围内的滚针进行试验;通过设计阿基米德螺线扩展曲线轮廓的凸轮,实现了滚针在非匀速运动过程中的部分行程段的匀速运动状态,经运动学仿真证明了其可行性,这一设计弥补了目前线接触运动工况的研究局限;所设计的试验机将首次对大长径比的滚针进行弹流润滑试验,并将首次对线接触匀速运动状态下的弹流润滑进行试验,这将推进弹流润滑试验在更广阔领域的研究,也将有利于推进弹流润滑理论的进一步发展。
参考文献:
[1] 张鹏顺,陆思聪. 弹性流体动力润滑及其应用[M]. 北京:高等教育出版社,1995.
[2] 吴震. 光干涉测量技术[M]. 北京:中国计量出版社,1995.
[3] 陈晓阳,沈雪瑾,刘颖. 有限长线接触光干涉弹流润滑试验设计[J]. 上海大学学报(自然科学版),1997,3(5):508-513.
[4] 李建朝,王玉国. 光干涉弹性流体动力润滑试验台设计[J]. 洛阳工学院学报,1995,16(2):43-47.
[5] 王少怀. 机械设计师手册[M]. 北京:电子工业出版社,2006.
[6] 温诗铸,杨沛然. 弹性流体动力润滑[M]. 北京:清华大学出版社,1992.
[7] D. G. Wymer, A. Cameron. Elastohydrodynamic lubrication of a line contact[J]. The institution of mechanical engineerings,1974,188:221-238.
[8] 华同曙,陈晓阳. 摆动工况下光干涉弹流润滑试验机的设计[J]. 工程设计学报,2008,15(4):268-270.
[9] 华同曙. 非稳态有限长线接触弹流润滑的实验研究[D]. 上海:上海大学,2010.
[10] H. Bahadoran, R. Gohar. Oil film thickness in lightly-loaded roller bearings[J]. Mechanical engineering science,1974,16(6):386-390.
[11] D. G. Wymer, A. Cameron. Elastohydrodynamic lubrication of a line contact[J]. The institution of mechanical engineerings,1974,188:221-238.
Design of Needle Roller Oscillate EHL Test Machine
SONG Wei-na, CHEN Xiao-yang, SUN Diao-chao, WANG Zhi-jian
(College of Electromechanical Engineering and Automation, Shanghai University, Shanghai 200072, China)
Abstract:According to the condition of low oscillating speed, a test rig which can be used to measure the EHL film of large length-diameter ratio needle roller is designed. This paper introduces its working principle, mechanical structure, optical system, transmission mechanism and loading system. In order to realize uniform motion in the process of non-uniform motion of the needle roller, the special cam profile with the expansion curve of Archimedes spiral is designed, the feasibility of this idea is proved by motion simulation, thereby the measurement function of EHL test rig is amplified.
Keywords:large lengthen-diameter ratio; needle roller; test machine; uniform motion
中图分类号:TH117.2+1
文献标志码:B
文章编号:1671-5276(2015)02-0033-03
作者简介:宋伟娜(1988-),女,硕士研究生,研究方向:机械设计及机械制造研究。
基金项目:国家“十二五”重点科研资助项目(XXXT-125-GH-148)
猜你喜欢
哈尔滨轴承(2021年1期)2021-07-21
哈尔滨轴承(2020年2期)2020-11-06
哈尔滨轴承(2020年2期)2020-11-06
哈尔滨轴承(2020年1期)2020-11-03
哈尔滨轴承(2020年1期)2020-11-03
测控技术(2018年8期)2018-11-25
电子测试(2018年6期)2018-05-09
光学精密工程(2016年4期)2016-11-07
橡胶工业(2015年2期)2015-07-29
橡塑技术与装备(2015年7期)2015-07-03