
半自动输弹机模糊控制系统
2015-02-22 05:48王惠源陆明张鹏军赵良伟卢家辉
火力与指挥控制 2015年1期
王惠源,陆明,2,张鹏军,赵良伟,3,卢家辉
(1.中北大学机电工程学院,太原030051;2.中国航天科工集团六〇一研究所,呼和浩特010076;3.中国兵器装备集团二〇八研究所,北京102200;4.山西北方机械制造有限责任公司,太原030000)
半自动输弹机模糊控制系统
王惠源1,陆明1,2,张鹏军1,赵良伟1,3,卢家辉4
(1.中北大学机电工程学院,太原030051;2.中国航天科工集团六〇一研究所,呼和浩特010076;3.中国兵器装备集团二〇八研究所,北京102200;4.山西北方机械制造有限责任公司,太原030000)
针对某半自动输弹机系统实际的输弹过程,提出了模糊控制系统的控制方案,根据本输弹机系统的模型设计了模糊控制参数。运用Matlab/Simulink仿真软件分别对采用模糊控制的系统和采用普通PID控制算法的系统进行仿真,得到各系统的单位阶跃响应曲线图和抗干扰信号图。对输弹机进行上炮试验,对比采用模糊控制的系统和采用普通PID控制算法的系统的实验结果,得到采用模糊算法的输弹机系统的卡膛一致性能很好的满足要求,具有一定的实践意义。
半自动输弹机,模糊理论,PID控制,Matlab/Simulink仿真
0 引言
现代战争中,火力压制一直是决定战争胜负的重要因素,提高大口径火炮发射的速度可以直接提高火力压制强度,由此采用自动装填系统的半自动输弹机对火炮进行快速装填。控制系统的稳定性和适应性直接关乎装填一致性,因而影响射击精度。
文献[1]针对自行火炮半自动装填机构设计原理存在的一些问题,在实验的基础上,对半自动装填机构中“恒力”输弹对初速的影响进行了分析和量化的研究,提出了解决“恒力”送弹问题的方法和途径。文献[2-3]对于半自动输弹机工作原理、运动学分析、推弹速度(在不同射角下有相同的卡弹速度)进行了分析计算。
随着控制理论技术的发展,人们发现将恰当的数学模型应用于运动控制器的设计方案中,可以实现电机运动前馈和误差的补偿,从而实现控制精度和控制速度的大幅提高[4-6]。在半自动装填的实际应用中,半自动输弹机电机控制系统属于自适应控制系统又简称自适应系统,它是给定信号随时间的变化规律事先不能确定的控制系统,是以位移、速度或力、力矩等作为被控量的自动控制系统,是一种反馈控制系统[7-8]。被控制量跟随输入量的变化而变化。而输入量的变化规律是事先不能确定的。大多数火力控制过程都不同程度地存在非线性参数时变性模型的不确定性,模糊控制算法模型以其调整灵活、实用性较强、结构简单、精度较高、可靠性好、鲁棒性强的优点,在火力指挥控制领域中得到了越来越广泛的应用,尤其是在半自动输弹机控制中,具有优于常规控制器的控制品质。
1 模糊控制
模糊控制策略是利用人工智能的方法,运用模糊数学的基本方法,把相关操作人员的经验条件、规则、操作用模糊集表示,并把这些相关的控制信息、有关规则作为知识存入控制器的知识库中,依据不同的实际现场情况,自动调整PID参数,来调整方案,实现最优控制。
模糊控制器自整定是要找出PID 3个参数与系统误差e和系统误差率ec之间的模糊关系,以误差e和误差变化ec作为系统的输入,不断地检测e和ec,利用模糊控制理论实时在线修改,来满足不同的控制要求,使被控对象具有较好的动态性能,这构成了模糊PID控制器。
2 输弹机控制系统方案的提出
系统的方案如下所示:输弹机为柔性输弹系统,输弹机推弹时,与输弹机垂直方向与炮身固联的激光位移传感器测得了输弹时的垂直振动,通过传感器与工控机的串行通信,把输弹机柔性体的振动实时地传递到控制系统中。通过控制系统的模糊控制,输弹机电机能够根据响应的振动特性来作出最优调节,使得每次输弹结束以后弹丸的卡弹精度达到最优,保证输弹的一致性。如图1所示。
图中,当输弹机系统进行弹射装填时,输弹机本身为柔性体,会对行星轮系统产生转速波动干扰,进而影响电机的动态特性,要保证输弹机惯性弹射阶段的一致性,而简单的PID控制无法保证速度波动小响应时间快的特点,所以就必须对输弹机进行智能控制。
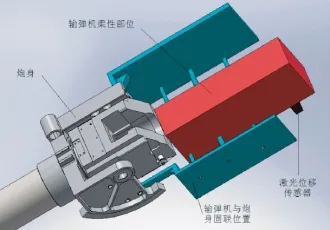
图1 输弹机结构三维实体示意图
3 输弹机系统模型
3.1 输弹机电机-负载系统模型分析
通过简化,把减速器、太阳轮等结构等效简化为一个齿轮箱。得到系统如图2所示,其中通过调节电压V的方法来对电机进行调速,以使输出的负载角位移信号θL尽快地达到并稳定。系统的参数在表1中给出:
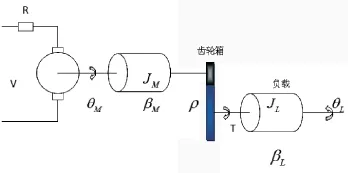
图2 输弹机电机-负载系统结构
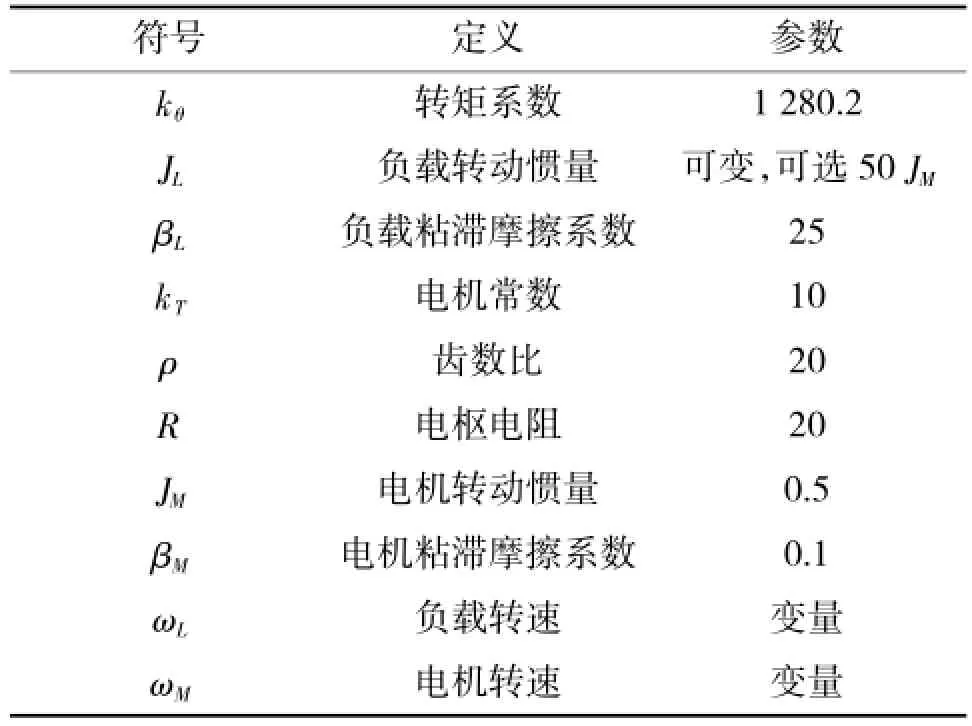
表1 输弹机电机-负载系统参数表
可以推导出微分方程组:
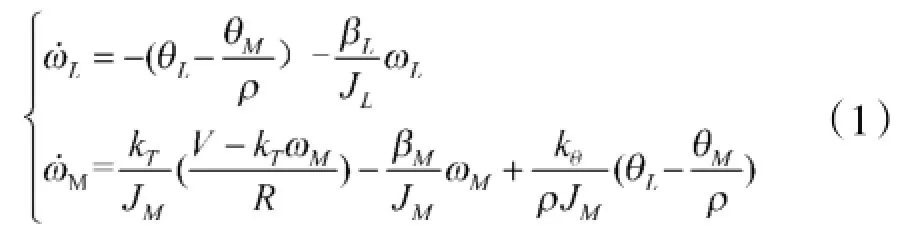
另外,由角位移与角速度之间关系可知:

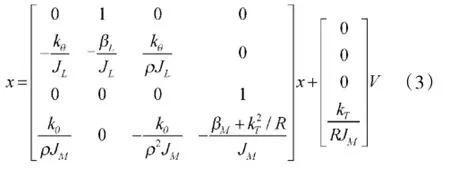
如果选择输出信号y=[θLT]T,其中T为输出转矩,则输出方程可以写成:
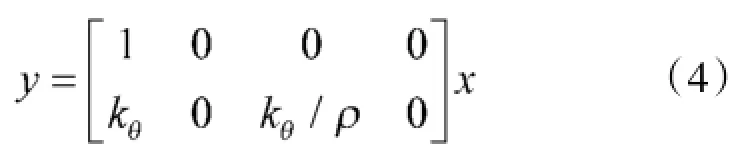
3.2 输弹机电机控制系统
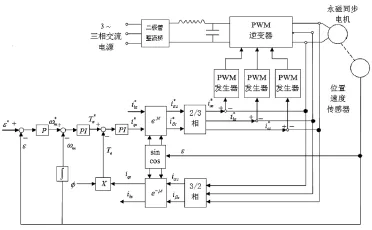
图3 输弹机永磁交流电机矢矩控制系统

这种伺服系统能使电机在基速以下时,ids*被设定为0,功率因数为1,实现最大转矩运行。
4 控制方案
4.1 输弹机模糊控制PID控制器设计
一般的PID控制器方程的一般形式为:

其中控制偏差e(t)=r(t)-c(t),r(t)为理想给定值,c(t)为实测值。
把式(5)写成传递函数的形式:

式中,TI为积分时间常数,KP为比例系数,TD为微分时间常数。
常规PID参数整定方法:确定调节器的比例系数KP、积分时间TI和微分时间TD。一般可以通过理论计算来确定,但误差太大。目前,应用最多的还是工程整定的方法:如经验法、衰减曲线法、临界比例带法和反应曲线法。
由于该系统采用从内到外分别为位置环、速度环和电流环多级等多环串联控制结构,三级调节器分别采用PI比例积分和P比例调节结构,所以此模型微分时间参数TD=0。
根据上文所述负载参数和电机参数,构建整个控制系统的传递函数模型,如图4所示,控制系统采用对内环引入前馈信号的方法给予前馈补偿,来降低系统响应时间,达到快速响应的目的。
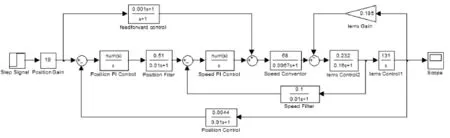
图4 PID控制器传递函数SIMULINK模型
4.2 模糊控制PID器设计
如下页图5所示,把输入PID控制器的偏差e和偏差变化率ec同时输入到模糊自适应控制器中。图5中的模糊控制器实际上是由两个子模糊控制器对两个参数KP、KI进行调节,然后经过模糊化、近似推理、清晰化以后,得到修正量ΔKP、ΔKI再代回PID控制器中。
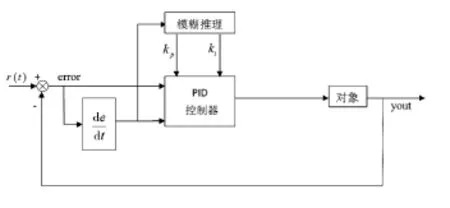
图5 模糊PID控制系统结构
设定e,ec,KP、KI都服从正态分布。根据当前误差变化率ec和计算误差e,对其模糊化,然后查询两个模糊控制查询表获得ΔKP、ΔKI,把得出的修正量ΔKP、ΔKI分别代入上述的PID控制器中,对两个系数进行实时在线修正,分别于初始的KP0、KI0相加得到整定以后的KP、KI,最后输出控制量到被控对象。如果满足系统的性能,则完成了控制,若不满足则继续调节参数。
设模糊控制器的输入:偏差e和偏差变化率ec的论域都为{-3,-2,-1,0,1,2,3},语言值{负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PN)},输出修正量ΔKP、ΔKI的论域为{0,1,2,3},语言值{零(ZO)、正小(PS)、正中(PM)、正大(PN)},输入输出变量KP、KI的隶属度函数采用的是三角函数[9-10]。
运用Matlab工具箱Fis编辑模糊控制器对各输入变量偏差e和偏差变化率ec输出变量隶属度函数和量化区间进行编辑,可得模糊控制规则表,如表2所示。
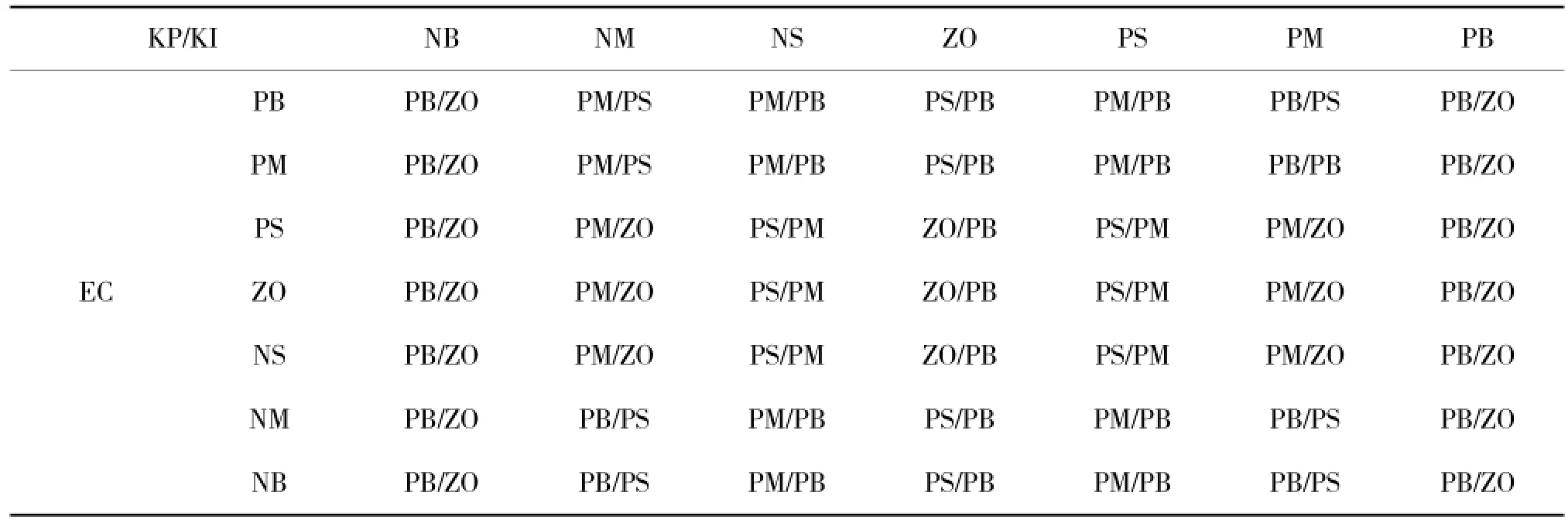
表2 模糊规则表
5 仿真研究
在Matlab/Simulink环境下建立模糊PID控制框图,如图6、图7所示。整个仿真模型由PID模块、模糊控制器模块、控制对象和输入输出等模块组成。图8给出了理想情况下模糊PID控制器与普通PID控制器的单位阶跃响应曲线,图9给出了干扰情况下模糊PID控制器与普通PID的仿真结果。
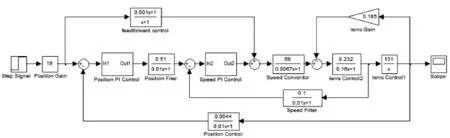
图6 输弹机模糊控制系统框图
由图8可以看出采用普通PID控制策略的模型,转速超调量大,而且速度波动很大,系统的稳定性很差,系统的调节时间也很长。而运用模糊PID算法的输弹机电机控制系统,消除了电机转速超调,电机的加速过程趋于平缓,转速达到稳态的时间也缩短了20%。因此,采用模糊PID控制策略能够显著改善臂式输弹机控制系统的响应性能。
在输弹机系统工作时,由于系统为柔性输弹结构,因此,存在系统振动干扰信号。图9是在电机运行0.43 s时加入了振动干扰脉冲信号,系统在0.57 s时就克服了干扰信号,达到又一次稳态,中间仅耗时0.14 s,响应迅速。结果表明,模糊PID是在常规PID算法的基础上,通过模糊推理系统,计算当前的系统误差e和系统误差变化率ec,查询模糊矩阵表对参数进行调整。模糊PID控制能够克服普通PID响应时间长、超调量大、稳态性能差的缺点,提高了控制质量。
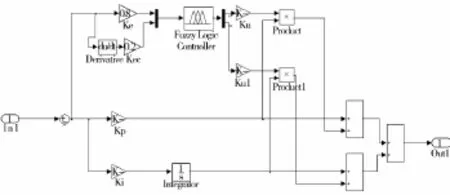
图7 输弹机位置环模糊PI控制子系统框图
图8 单位阶跃响应曲线
图9 加入干扰信号仿真结果图
6 试验论证
基于上文的仿真系统,本文进行了上炮输弹试验。对168发弹丸进行装填,针对不同射角,0°~70°每隔10°分1组,分为8组,每组7发,总共打3次。
首先采用一般PID控制系统的伺服控制系统。卡弹精度差,为-2 mm~4 mm。出现了一定的掉弹现象,卡膛力的变化范围为很大,卡膛一致性差。
其次采用了模糊PID控制算法的半自动输弹机系统,卡弹精度可以达到±1.5 mm。没有掉弹现象,卡膛力的变化范围小了很多,卡膛一致性明显提高。试验结果总结如表3所示。
7 结束语
本文通过模糊控制理论,设计了臂式输弹机控制系统,并进行了性能仿真。针对臂式输弹机的快速响应以及柔性输弹机高抗干扰能力,将模糊控制和传统的PID控制结合设计了模糊PID控制器,并在Matlab/Simulink环境下分别对普通PID控制器和模糊PID控制器进行仿真,结果表明模糊PID控制策略优于传统的PID控制器,响应更快,抗干扰能力强,在臂式输弹机控制系统中可以获得更满意的控制效果,对提高火炮射速和火炮射击精度有一定的意义。
表3 试验总结表
[1]赵森,钱勇.自行火炮半自动装填机构输弹问题研究[J].兵工学报,2005,39(5):592-594.
[2]曲振森,薄玉成,王惠源,等.臂式输弹机的机构设计和仿真分析[J].火炮发射与控制学报,2012(3):64-67.
[3]曲振森,薄玉成,王惠源,等.臂式输弹机构设特性研究[J].中北大学学报,2012,35(3):117-120.
[4]栾宗涛,陶涛,梅雪松,等.交流伺服系统脉冲序列位置控制研究[J].西安交通大学学报,2009,12(4):35-39.
[5]Tung E D,Anwar G,Tomizuka M.Low Velocity Friction Compensation and Feed-forward Solution Based on Repetitive Control[J].ASME Journal of Dynamic Systems,Measurement and Control,1993,115(2):279-284.
[6]Brian A H,Pierred,Carlos C,et al.A Survey of Models,Analysis Tools and Compensation Methods for the Control of Machines with Friction[J].Automatic,1994,30(7):1083-1138.
[7]尔桂花,窦曰轩.运动控制系统[M].北京:清华大学出版社,2002.
[8]刘胜,彭侠夫,叶瑰昀.现代伺服系统设计[M].哈尔滨:哈尔滨工程大学出版社,2001.
[9]薛定宇.控制系统计算机辅助设计-MATLAB语言与应用[M].(第二版)北京:清华大学出版社,2006.
[10]曾军令,侯保林.一种用于大口径火炮的气液弹射式输弹机[J].四川兵工学报,2010,31(1):6-9.
[11]韩沛,朱战霞,马卫华.基于模糊自适应PID的随动系统设计与仿真[J].计算机仿真,2012,29(1):138-142.
Semi-automatic Rammer Control System Based on Fuzzy Adaptive Control Theory
WANG Hui-yuan1,LU Ming1,2,ZHANG Peng-jun1,ZHAO Liang-wei1,3,LU Jia-hui4
(1.School of Mechatronics Engineering,North University of China,Taiyuan 030051,China;
2.The 601st Institute of the Sixth Academy,China Aerospace Science&Industry Corporation,Hohhot 010076,China;
3.No.208 China Research Institute of China Ordnance,Beijing 102200,China;
4.China Ordnance Industry Group 247 Factory,Taiyuan 030000,China)
The paper analyzes the semi-automatic rammer practical ammunition ramming process,puts forward fuzzy control system,designs the control parameters of the fuzzy control system.The paper uses Matlab/Simulink software to simulate the fuzzy control system and the normal PID control system. Systems’unit step response curve and anti-disturbance signal curve is gotten.Doing the gun trials,comparing the two trial results,the semi-automatic rammer system that using fuzzy control algorithm solve the problem of the consistency of bayonet-chamber is gotten,it has some practical significance.
semi-automatic ramming,fuzzy control theory,PID control,Matlab/Simulink simulation
TP273;TJ303
:A
1002-0640(2015)01-0153-05
2013-11-15
2014-02-17
王惠源(1965-),男,河北清苑人,博士后,教授。研究方向:兵器发射理论与技术。
猜你喜欢
农村电气化(2022年7期)2022-07-19
科学咨询(2021年12期)2021-06-30
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
建材发展导向(2019年10期)2019-08-24
中国交通信息化(2019年6期)2019-08-23
汽车之友(2018年15期)2018-08-14
电子制作(2018年10期)2018-08-04
电子制作(2016年21期)2016-05-17
汽车之友(2015年8期)2015-06-08
