基于阿贝误差补偿光路的水准标尺检定装置及不确定度分析
2015-02-20 07:31李文一程增杰
中国测试 2015年10期
李文一,程增杰
(中国地震局第一监测中心,天津 300180)
基于阿贝误差补偿光路的水准标尺检定装置及不确定度分析
李文一,程增杰
(中国地震局第一监测中心,天津 300180)
现行有效的JJG 8——1991《水准标尺》要求以激光波长作为长度基准,使用激光干涉检定器对因瓦水准标尺进行检定。检定3m长的水准标尺,若照准部不动而标尺移动,需要6m长的导轨。为缩短导轨长度,降低加工难度,采用标尺固定而照准部移动的检定装置,可有效地将导轨长度由6m缩短至3m。由于不满足阿贝原则,检定装置设计基于阿贝误差补偿光路的结构,实现对阿贝误差的消减。该装置补偿性能的实测结果表明:利用光学补偿的方法极大地消减阿贝误差。“米间隔长度平均值”不确定度的评定结果表明:该装置可以满足水准标尺检定规程中对检定装置的相关要求。该补偿光路也可用于其他长度测量系统。
双频激光干涉仪;因瓦水准标尺;阿贝误差;补偿光路;不确定度
0 引 言
因瓦水准标尺是与水准仪配套用于精密水准测量的计量器具,水准标尺的尺长误差是影响高程测量结果的主要误差来源,因此,通过准确测量水准标尺的实际尺长并对尺长进行改正,是提高精密水准测量准确度的重要途径。现行有效的JJG 8——1991《水准标尺》[1]要求米间隔长度平均值和各分米分划误差的检定需使用双频激光检定器(准确度不低于6μm的装置)进行检定,我国20世纪80年代后期开始采用双频激光干涉仪检定水准标尺,以激光波长作为长度基准,将水准标尺的标称尺长与其进行比较测量,获得尺长修正值。检定装置的结构主要有两种:1)照准部固定不动而标尺移动,需要的导轨长度为6m,导轨直线度要求高,机械加工的难度较大,多数检定机构采用的都是这种结构;2)标尺固定而照准部移动的结构,结构紧凑,导轨长度缩短为3m,但不能满足阿贝测量原则,会带来较大的测量误差,需要设计光学补偿光路消减阿贝误差。
当水准标尺检定装置的标尺不动,显微镜(与干涉仪测量反光镜固联在滑台上)瞄准标尺分划面作检尺运动时,位移测量系统工作点(瞄准显微镜)的路程和被测位移作用点(标尺分划面)的路程没在同一条直线上,不满足阿贝原则[2]。由于合理地设计了光学补偿光路大大消减了阿贝误差,使得整套装置结构紧凑,有效缩短了导轨长度,并且装置的准确度能够满足JJG 8——1991中对检定装置的要求,可用于水准标尺的检定。
1 工作原理
检定装置主要由双频激光干涉仪、导轨、瞄准显微镜、承载瞄准显微镜的滑台和数据处理系统等组成(见图1、图2)[3-4]。

图1 双频激光干涉仪水准标尺测长系统结构示意图

图2 水准标尺检定装置

图3 双频激光干涉仪测量光路图
双频激光水准标尺检定装置的测量光路如图3所示。来自双频激光头的振动面互相垂直的偏振光f1、f2经偏振分光镜后,光束f1反射至转向棱镜后到达参考反光镜,然后平行地返回;光束f2透过偏振分光镜到达平面反光镜后返回,途中两次通过λ/4波片,偏振方向改变了90°,不能通过偏振分光镜,返回的f2光束被偏振分光面反射,再次通过λ/4波片到达测量反光镜后,经测量反光镜反射至偏振分光镜,由于f2光束又两次经过λ/4波片,偏振方向再次改变90°,f2光束可以通过偏振分光镜返回,至此,f2光束透过偏振分光面与f1光束相互平行,汇合产生干涉。
照准部以及激光干涉仪的测量反光镜均与滑台固联,随滑台沿导轨作检尺运动,滑台运动时,偏振干涉光路相应发生改变,根据双频激光干涉仪的工作原理可知,由于多普勒效应,测量光束f2发生频移变为f2+Δf,测量信号的频差与参考信号的频差之差为

设拍频数为N,则:

式中S为激光干涉仪测定的测量反光镜的位移量,所以:


这样就实现了用激光波长间接测量标尺分划间隔值。
2 阿贝误差补偿光路
双频激光水准标尺测长系统采用的是标尺固定而照准部移动的方案,缩短了导轨长度,降低了导轨的加工要求,但由于测量反光镜的f2光束(即测量光束)与被检标尺分划面的中轴线不重合(相距a),不满足阿贝原则(位移测量系统工作点的路程应和被测位移作用点的路程位于同一条直线上),在滑台移动中可能产生转动(如导轨的不直线度)将带来阿贝误差。因此,系统设计了特殊的阿贝误差补偿光路,如图4所示[5-6]。

图4 阿贝误差补偿原理图
设计中,使平面反光镜与参考反光镜(角锥棱镜)固联于滑台,并使角锥棱镜的顶点O1(f1光束中心)到被检标尺分划面的距离是平面镜中心O2(f2光束中心)到标尺分划面的距离的2倍,即保证a1=a2=a,当滑台作检尺运动有l位移并有θ转角时(O1、O2实际位置为O1″、O2″),f1和f2两光束的光程分别为

其光程差为

可见,装置中θ角和Δa=a1-a2是产生阿贝误差的原因,其值为

若a1=a2,则:

显然,当a1=a2时,工作台偏转θ角而产生的误差得到补偿,激光干涉仪测得的位移量与滑台实际的位移l相同,所以,只要结构设计上满足a1=a2=a则滑台移动过程中的微小转角对测量结果无影响,阿贝误差可以得到大幅度消减[7]。
3 阿贝误差补偿光路补偿性能测试
为了验证阿贝误差补偿光路有效性,进行了如下的试验:导轨正常时测定水准标尺上某一段分划间隔的长度值,然后,在检定装置导轨一边的“V”形槽下加一厚约0.1 mm的钢带垫片后,分别测定使用阿贝误差补偿光路和取消阿贝误差补偿光路时,水准标尺同一段分划间隔的长度值,测试结果见表1。
由表1可以看出,当检定装置有阿贝误差补偿系统时,导轨“V”形槽加垫片后与未加垫片时,测得的水准标尺分划间隔的差值为:895.42780-895.42777= 0.00003mm。
当检定装置取消阿贝误差补偿系统时,导轨“V”形槽加垫片后与未加垫片时,测得的水准标尺分划间隔的差值为:895.39920-895.42777=-0.0286mm。
可以看出阿贝误差补偿光路的补偿性能良好,滑台偏转θ角引起的阿贝误差得到了补偿,有效地消除了阿贝误差的影响[8-9]。
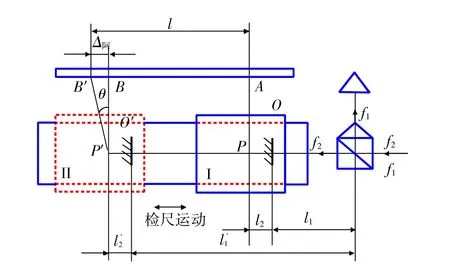
图5 检定系统测量误差分析图

表1 检定装置阿贝误差补偿性能测试结果
4 检定系统的主要误差来源
根据双频激光水准标尺检定系统的工作原理,其测量过程的误差分析如图5所示[10]。
滑台在位置I时,瞄准显微镜照准标尺划A,相应的有l1,l2,其中l1为偏振分光镜至测量反光镜的距离;l2为测量反光镜至瞄准显微镜光轴所照准标尺刻划线A的距离。
检尺时,滑台移动到位置II后,此时相应的会有l1′,l2′,显微镜照准标尺分划线B′,图中Δ阿=BB′为残存阿贝误差。
因此,测得的标尺分划间隔的长度为

式中:Δλ——激光波长的变化量;
ΔN——条纹计数器的误差。
系统不存在测量误差时,双频激光测量值:

所以测量误差:

式(12)中第1项为激光干涉仪的仪器误差;第2项Δl2=(l2′-l2)主要为显微镜的瞄准误差,同时也与瞄准显微镜连接的稳固性及各项可能的变形误差(力变形,热变形)有关,一般来说,设计中也尽量减少值的大小;第3项Δ阿为阿贝残余误差[11-12]。
因此,检定标尺时,主要的误差来源有以下5项:
1)双频激光干涉仪的测长不确定度u1
惠普双频激光干涉仪《用户指南》中,给出的干涉仪固有的极限差为0.1μm/m,即1m长存在0.1μm的误差。但工作环境的空气温度、空气压力及湿度的变化对激光束的影响会带来新的误差,使用与仪器配套的各传感器自动补偿后,仍会有误差,由于采用了准确测量环境温度、气压进行人工修正,此项误差可以做到1m内小于0.5μm。
另外,检定室内空气的波动而造成读数的跳动约0.2μm左右。
综合以上各项,双频激光干涉仪的测长极限误差为

若将其考虑为等概率分布,则其标准不确定度:

2)标尺分划面与导轨运动方向不平行引入的标准不确定度u2
主导轨的设计制造准确度的直线度要求为0.02mm/m,由于运输震动的影响和应力变形是难免的,因此导轨最终的准确度是靠调整来保证的。经专用导轨检具和1″水准气泡检查,标尺分划面与导轨运动方向不平行的夹角α≤60″,当l=1 000 mm时的最大误差为

若将其考虑为等概率分布,则其标准不确定度:

3)激光束与导轨不平行所引起的标准不确定度u3根据《双频激光干涉仪》[3]一书给出的误差计算公式:

式中:D——测量反光镜移动距离;
S——测量反光镜移动D时,参考光束与测量
光束在接收器上的相对位移量。
取D=1000mm,S≤1mm时,E=5×10-4μm。若将其考虑为等概率分布,则其标准不确定度:

4)残余阿贝不确定度u4
导轨调整完毕后,当阿贝条件不完全满足时(标尺调整误差及标尺弯曲的影响),根据标尺分划面的焦面调整的误差以及导轨的直线度误差可以得到:Δa=a1-a2=±2mm,导轨转角θ=20″为系统调整后最大误差量,则阿贝误差的残余误差:

若将其考虑为等概率分布,则其标准不确定度:

5)显微镜的瞄准不确定度u5
经初步测定,对水准标尺任一刻线,显微镜的一次瞄准误差m照″=±3.0μm,一个米间隔长度的测定需要两次瞄准,故测定米间隔长度的瞄准误差:

实际检尺中,一个米间隔长度的测定分往测和返测取其平均值。若仍将其考虑为等概率分布,则测量米间隔长度平均值的照准标准不确定度:

综上,根据式(10)建立数学模型,通过不确定度传播定律,各量相互独立则水准标尺检定系统测量标尺“米间隔长度平均值”的合成标准不确定度:

取包含因子k=2,扩展不确定度:

5 结束语
双频激光干涉仪是目前测距准确度最高的长度测量仪器,基于双频激光干涉仪的水准标尺检定测长系统,利用光学补偿的方法极大地消减了阿贝误差,不仅缩短了导轨长度,而且降低了导轨的加工准确度要求[13]。通过分析测长系统的主要误差来源,对该装置检定水准标尺的米间隔长度平均值的不确定度作出了评定,该装置可以满足JJG 8——1991《水准标尺》中检定装置“准确度不低于6 μm”的相关要求。
[1]JJG 8—1991水准标尺[S].北京:中国计量出版社,1991.
[2]薄志鹏.关于水准尺1m间隔真长改正数之计算——因瓦水准尺的研究之四[J].武测资料,1979(3):81-101.
[3]关信安,袁树忠,刘玉照.双频激光干涉仪[M].北京:中国计量出版社,1987:35-41.
[4]王因明.光学计量仪器设计[M].北京:机械工业出版社,1989:69-73.
[5]刘君,穆海华,孙业业,等.激光干涉测量中的误差分析与补偿[J].机床与液压,2006(9):181-184.
[6]尹世松.论光学计量仪器设计中的两个重要原则[J].光学仪器,1986(5):1-5.
[7]石照耀,张斌,费业泰.阿贝误差再认识[J].仪器仪表学报,2012(5):1128-1133.
[8]李信,赵念念,等.因瓦水准尺自动检测系统的研究[J].测绘学报,1990(5):130-138.
[9]王新华.双频激光干涉仪用于水准标尺检测中的阿贝误差补偿[J].武汉测绘科技大学学报,1994(3):91-94.
[10]JJF 1059.1—2012测量不确定度的评定与表示[S].北京:中国质检出版社,2012.
[11]张义发.标尺误差及其对垂直形变资料的影响[J].地壳形变与地震,1995(8):60-66.
[12]范志军,所睿,等.高测速双频激光干涉仪的若干关键问题研究[J].光电子激光,2004(12):1419-1421.
[13]齐向东,滕丽华,于海利.丝杠精度双频激光干涉测量中的阿贝误差实时补偿[J].中国光学与应用光学,2010(6):279-284.
Verification device of leveling staff based on the optical compensation for Abbe error and uncertainty analysis
LI Wenyi,CHENG Zengjie
(First Crust Monitoring and Application Center,CEA,Tianjin 300180,China)
The current effective verifacation regulation JJG 8——1991Level Rodrequires the use the laser wavelength as length standard.If the collimation part is immobile and the leveling staff is mobile,a 6-meter long linear guide is needed to verify a 3-meter long leveling staff.In order to shorten the length of the guide and reduce the mechanicalprocessing difficulty,uses the equipment with mobile collimation and immobile leveling staff,to effectively cut the length of the guild from 6 m to 3 m.Because the verification device cannot meet the requirements of the Abbe principle,an optical compensation structure is designed to reduce the Abbe error.The results of the compensation performance of the device shows that the Abbe error is reduced effectively.The analysis of the uncertainty of average length of one meter intervals shows that the device can meet the requirements ofLevel Rod,and the optical compensation structure can be used in other lenghth testing systems.
dual-frequency laser interferometer;leveling staff;Abbe error;the compensation for Abbe error;uncertainty
A
:1674-5124(2015)10-0034-05
10.11857/j.issn.1674-5124.2015.10.008
2015-02-13;
:2015-04-20
中国地震局地震研究所所长基金(IS201366008)
李文一(1978-),女,天津市人,工程师,主要从事测绘仪器检定方法的研究与检定装置的研制,及自动化开形变监测系统研制。
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02
诗歌月刊(2022年2期)2022-03-15
今日农业(2021年11期)2021-11-27
制造技术与机床(2019年6期)2019-06-25
航天电子对抗(2019年4期)2019-06-02
当代陕西(2019年5期)2019-03-21
收藏界(2018年1期)2018-10-10
制导与引信(2017年3期)2017-11-02
中国卫生(2015年9期)2015-11-10
第二课堂(课外活动版)(2015年3期)2015-10-21