基于BOSCH ME7系统的手动挡车型判档及防抖动功能的研究
2015-02-20 13:47
装备制造技术 2015年7期
(上汽通用五菱汽车股份有限公司,广西 柳州 545007)
判档及防抖动功能是车辆驾驶性匹配的基础。驾驶性是指任何天气、任何驾驶条件下,汽车的发动机和动力传动系统按照驾驶者的意志进行平稳运转的能力。整车驾驶性能的评价是以主观感觉作为评价基准的,本文通过Bosch ME7系统,对车辆判档及防抖动功能的标定策略进行研究,做好判档及防抖动功能的匹配工作,为后续进行驾驶性精细调节提供必要条件。
1 判档匹配
1.1 车速信号计算原理
对于Bosch ME7系统,车速信号来源车速传感器,此信号为一个电信号,经过ECU(发动机控制模块)系统滤波整形成一个方波信号,该信号表示每秒钟信号轮转过的齿数ZF,ECU将该信号除以车速信号轮每米的齿数AI即可得到车速,车速的计算原理如下:

对于匹配来说只要将匹配值AI标定准确即可得到车速信号。
1.2 档位信号计算原理
一般情况下,车速和发动机转速之间有如下关系[1]:
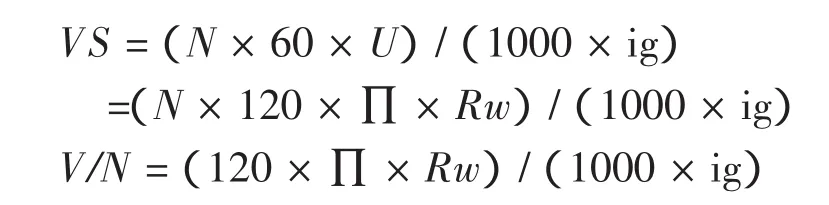
其中:
VS表示车速,km/h;
N表示发动机转速,r/min;
U表示轮胎周长,m;
Rw表示轮胎半径,m;
ig表示变速箱系统的速比。
根据上述理论公式,档位信号可以用车速VS和发动机转速N的比值V/N来表征,该值反映了不同档位下的车辆变速系统速比、驱动系统以及轮胎直径等的关系。
1.3 判档匹配基本思路
在负荷变化时,车辆冲击和扭振等因素都会导致发动机转速波动,从而使得V/N发生波动,因此某一档位对应的V/N应为某一特定区间[2],在Bosch ME7系统中的判档模块,通过标定最大和最小值来进行。
1.4 判档匹配具体方法
首先关闭防抖动功能,分别在每一档位上,以1 500转低负荷匀速行驶,通过急加速和急减速让发动机转速在1 000~2 500转区间变化,测得每一档V/N的区间,即V/N变化的最大和最小值填入,表格1是某微型车的判档匹配标定数据。需要注意的是,通常某档位的最小值与下一档的最大值有一定的重叠,该重叠区间不应该太大,否则也会引起档位的乱跳。如果确实存在较大重叠区间,说明变速箱某几档之间差别相对较小。重叠区间需要确保在换档后档位能被及时正确识别。在该值标定结束后,可以将驾驶性功能打开,自由驾驶检查档位输出的正确性。
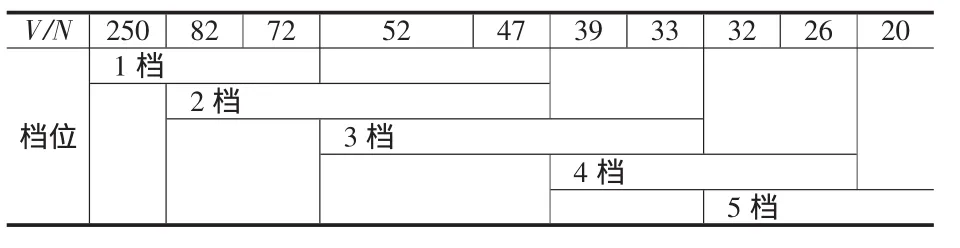
表1某微车型档位匹配标定值
需要注意的是表格1的V/N的数值具有单调性,即从小变大或从大变小,标定的数值不允许破坏单调性。这也是系统判档后输出正确档位识别的功能要求
另外,需注意的是对于没有离合器开关的系统,ECU无法知道换档过程,当离合器踩下时,此时车速和转速的比值已经不能正确反映车速驱动系统的速比变化,故此时系统计算的档位值会出现不准确的情况。对于有离合器开关的系统,当离合器踏下时,档位标识会从当前值变化到0即空档状态,当离合器闭合时,档位标识能准确表征档位状态。
2 防抖动功能匹配
当负荷大幅变化时,动力总成系统就可简化为单质量弹簧系统,加上动力总成硬件间隙等因素,会造成不合理的发动机转速振荡冲击,引起车辆前后抖动[3],即驾驶性很差。加速防抖功能就是通过扭矩干预达到减少或弱化这种振荡,达到驾驶员不能查觉,或者在可接受范围;而因为转速振荡频率很快,要达到控制效果,扭矩干预调节必须快速响应,因此只能通过点火角来进行控制。防抖动功能简称AR。
2.1 总体控制逻辑
Bosch ME7系统的防抖动功能模块的总体控制逻辑见图1。用发动机模型转速与实际转速的差值,通过标定系数的相乘,得到修正扭矩Dr,该修正扭矩作用在最终的输出扭矩上,实现防抖功能。

图1防抖动功能控制逻辑图
其中:Nr是模型转速和实际转速的差值,为测量量;Fr是根据不同车型进行标定的输出值,为AR的修正系数,最终的AR修正扭矩Dr=Nr×Fr,其中Fr的标定值跟档位一一对应。表格2为某手动挡微车的标定值。

表2某微车型修正系数Fr标定值
为避免特殊工况下修正扭矩超限,还需要有两个上下限的表格来限值Dr:Ko和Ku,同理,上下限表格也跟判档识别的档位一一对应。
2.2 具体控制方法
由驾驶员请求扭矩Mi减去发动机阻力扭矩Md得到离合器处输出的计算扭矩Mk,减去车辆动量(Fl×Nf)得到离合器处输出的有效扭矩Me,随后根据车辆的车重等系数表格,利用Ki将扭矩转化成模型转速Nd,Nd减去发动机实际转速N,得到模型转速与实际转速的差值Nf,经过2阶低通滤波之后,Nf变成Nl,接着Nl用来和Nf做减法得到用于进行扭矩调节的转速差Nr。最后Nr与整车修正系数Fr相乘,得到Dr(用于实现AR功能的扭矩差)见图1。
因此手动挡车型有三个标定表格最为重要:Ki(车型系数,将扭矩模型转化成转速模型);Fl(负荷系数,与Nf相乘得到车辆动量);Fr(与Nr相乘得到Dr)。
2.2.1 车型系数Ki和负荷系数Fl的标定
关闭AR功能,在每个档位上油门踩到底进行全负荷加速,测量离合器扭矩Mk和发动机转速N,选取转速平滑连续上升段曲线进行如下计算。

然后根据等式Ki×Fl=(A,B,C),其中A、B、C分别是一档、二档、二档以上的标定值,由此计算出Fl的标定值,根据某微型车项目的匹配经验,建议1档A=7,2档B=10,2档以上C=15,实际标定中可以根据车型的实际情况取值。评定依据是通过比较发动机模型转速Nd和实际转速N,在转速稳定平滑上升段的误差在可接受范围内。
2.2.2 修正系数Fr的标定
Fr决定了扭矩调节的强弱,初步计算可以按如下方式:
Fr=0.67×100/Mdn,Mdn为最大计算扭矩,来自发动机台架标定,比如:0.67×100/240=0.2。实际标定过程中可以通过加减该系数来决定调节的强弱。
2.2.3Ko和Ku的标定
Ko和Ku是一组对应的上下限表格,作用是在正常稳态行驶中,避免出现点火角的跳变(这种跳变会影响失火诊断)。标定方法是:在转鼓上,每一档下,匀速驾驶,测量Nr和Fr,算得乘积后再乘以1.25~1.5,将值填到相应的Mk下。关于坐标轴Mk选择以及Ko/Ku数据分布趋势的一点建议是,在较大离合器扭矩时,为了不影响0到100公里加速性能,尽可能填入较大值以关闭点火角调节;在离合器扭矩接近0时,填入较小的值,以便小波动也可以得到调节。
2.4 防抖动功能的开启条件
Bosch ME7系统定义防抖动功能的激活需要全满足以下开启条件:
(1)起动结束,即起动标志位等于1;
(2)非断油工况,即断油标志位等于0;
(3)非换挡工况及换挡标志位等于0;
(4)车速不能低于标定阀值;
(5)怠速工况下,发动机转速不能低于标定阀值;
(6)发动机转速在标定阀值之间,其中最低转速是一个与档位相关的表格,最高转速为一个标定阀值;
(7)水温高于标定阀值,一般最低水温阀值标定为 0°.
3 结束语
判档识别及防抖动功能是车辆驾驶性匹配的基本工作,出色的车辆驾驶性调教,必须在此打好基础。标定数据的优化需要进行多次重复的试验,包括整车台架及道路试验,覆盖实际驾驶工况。防抖动功能的进一步优化还需要同时考虑对发动机扭矩模型的影响,在整车开发项目时间和资源允许的情况下,经过多次道路试验检查防抖动功能及扭矩功能模型的运行情况,或许能得到更优的匹配效果。
[1]余志生.汽车理论[M].北京:机械工业出版社,2009.
[2]王兆娟.发动机电控系统优化匹配方法的研究[J].小型内燃机,1999,28(4):35-36.
[3]德同BOSCH公司.BOSCH汽车工程师手册[M].顾柏良,唐振声,等,译.北京:北京理工大学出版社,1999.
猜你喜欢
智富时代(2018年9期)2018-10-19
智富时代(2018年9期)2018-10-19
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
汽车维修技师(2017年9期)2017-02-04
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年5期)2015-02-28
汽车电器(2014年8期)2014-02-28
客车技术与研究(2014年5期)2014-02-28