基于立体图像水印算法的研究
2015-02-19 06:21赵文龙于水源
中国传媒大学学报(自然科学版) 2015年3期
赵文龙,于水源
(中国传媒大学 计算机学院,北京 100024)
基于立体图像水印算法的研究
赵文龙,于水源
(中国传媒大学 计算机学院,北京 100024)
摘要:提出了一种基于全局视差和左右视图图像块间对应关系的立体图像水印算法,来解决立体图像的版权保护和内容认证的问题。首先根据立体图像的左右视图求出立体图像的全局视差,然后找到左右视图的相似区域,最后相似区域内基于左右图像的对应关系完成水印的嵌入。由于DC系数是块能量的集中区域,其左右图像块间的对应关系比较稳定,所以本文选择左右图像Y分量DC系数进行水印的嵌入,这样可以提高水印的鲁棒性。仿真实验结果表明,水印具有很好的不可见性和较高的鲁棒性,能够抵抗高强度jpeg压缩、高斯和SBS编码攻击。
关键词:立体图像;左右图像;全局视差;亮度分量;DCT
1引言
立体视频由于其强烈的视觉冲击感,能够给人带来身临其境的感觉,而备受观众们喜爱。但是,立体视频的内容和版权保护问题一直是悬而未解的问题。有效的立体视频数字水印算法可以帮助解决立体视频在网络传输遇到的版权纠纷,内容认证等一系列问题。
视频由连续播放的图像组合而成的,因此对于视频问题的研究可以转化为对图像的研究。立体图像组成方式有两种:彩色图像组成的立体图像、彩色图像和深度图像组成的立体图像。第一种组成方式可以提供很高的图像质量,适合高分辨率的显示器观看。针对第二种方式,需要借助软件绘制另一幅彩色图像,从而得到第一种方式的立体图像。但是绘制出的图像质量不太高。所以本文主要针对第一种方式的立体图像,提出了一种立体图像数字水印算法。
嵌入立体图像数字水印有两种思路,第一种思路就是把立体图像看作是两幅单独的平面图像,这样就可以利用平面图像的数字水印算法去处理立体图像。第一种虽然也能完成立体图像水印的嵌入[1],但是没有考虑立体图像的感知特性,对立体图像质量和深度线索可能会产生影响。第二种思路就是分析研究立体图像与平面图像间的关系和立体图像特有的特征,利用成熟的平面图像数字水印技术,完成对立体图像版权方面的保护。
本文采用第二种思路,结合立体图像的特有特征(视差)和立体图像左右图像块间的关系,进行深入研究,进而提出立体图像水印嵌入和提取算法。
2立体图像水印算法方案设计
2.1立体图像特征分析
立体视频是基于人眼的双目视差原理[2],即左右眼各接收一幅同一场景的图像,这两张图像有微小的角度差异,由于这种差异,左右眼接收图像会形成双眼视差,经过大脑分析整合,就会体验到立体视觉效果[3]。如图1所示。
正是由于双目视差的存在,才形成了立体视觉效果,所以双目视差是立体图像最重要的一个特征。本节首先研究立体图像特点,利用全局视差曲线找到全局视差。所谓全局视差,就是在精确匹配左右图像最大相似区域时,左右图像偏移的像素列数。
根据平行视点立体图像拍摄原理:立体图像是由两个平行相机拍摄而成的,内容存在很大的相似性,所以存在全局视差。图2和图3中的红框内的内容,就是左右两幅图像相似的部分,而其中的偏移距离就是我们所说的全局视差,全局视差具有唯一性和稳定性[4]。

图1 立体图像原理

图2 左图像

图3 右图像
全局视差的计算方法一般有两种:第一种就是灰度差的绝对值。第二种就是灰度差的平方和。这里我们使用第一种方法,如公式(1)所示:

-imgR(x+i,y)|
(1)
其中,imgL和imgR分别指左右视点图像,W和H分别指左右视点图像的宽高,i表示左右视点图像偏移列数,x,y分别为对应像素坐标。
基于立体拍摄原理,两台摄像机是并排放置的,所以左视点从左边界开始,图像的大部分可以在右视点找到完全一样的部分,既视差为0。但是,由于视差和温度、光线、遮挡等多种因素有关系,所以就算相机再平行,也不可能找到完全一样的部分,既差值为0的部分。但是,我们可以找到一个偏移距离,使左右视点像素差异最小,这个所谓的偏移距离就是我们所说的立体图像的全局视差[12][5]。
全局视差k可以作为检测立体图像视差是否改变,基于以上原理,我们按图4所示流程来求取全局视差:

图4 全局视差曲线流程图
1.读取左右视点图像,分别将左右视图转换为灰度图(通过图像的亮度层的差值达到我们的目的)。
2.根据不同的偏移列数 i,求得右边界向左偏移 i 列后的左视点和左边界向右偏移 i 列后的右视点图像的灰度值像素的差值,并将此时像素差值的绝对值之和记为Iri,然后将Iri除以偏移后的宽高((w-i)*h),并将结果记录到数组valuei里。
3.偏移列数i不大于原始左右视点图像的一半时,i=i+1,重复步骤2,否则跳到步骤4。
4.求出数组valuei中的最小值,找到对应的i值,就是我们所说的全局视差,同时绘出i与valuei对应的曲线,如图5所示。

图5 全局视差曲线图
2.2立体图像左右视图关系分析
立体图像相对于二维图像来说,存在以下区别:
a.立体图像有左右两幅图像,分别为左图像和右图像
b.立体图像的左右两幅图像,有很大一部分内容是相似区域,存在一定的视差。
c.左图像的右边界、右图像的左边界、左图像前景对象的左侧和右图像前景对象的右侧属于遮挡暴露区域,视为非可视区域。
由于这些区别的存在,所以立体图像比二维图像存在更多的关系可供我们使用[6],如图6所示:
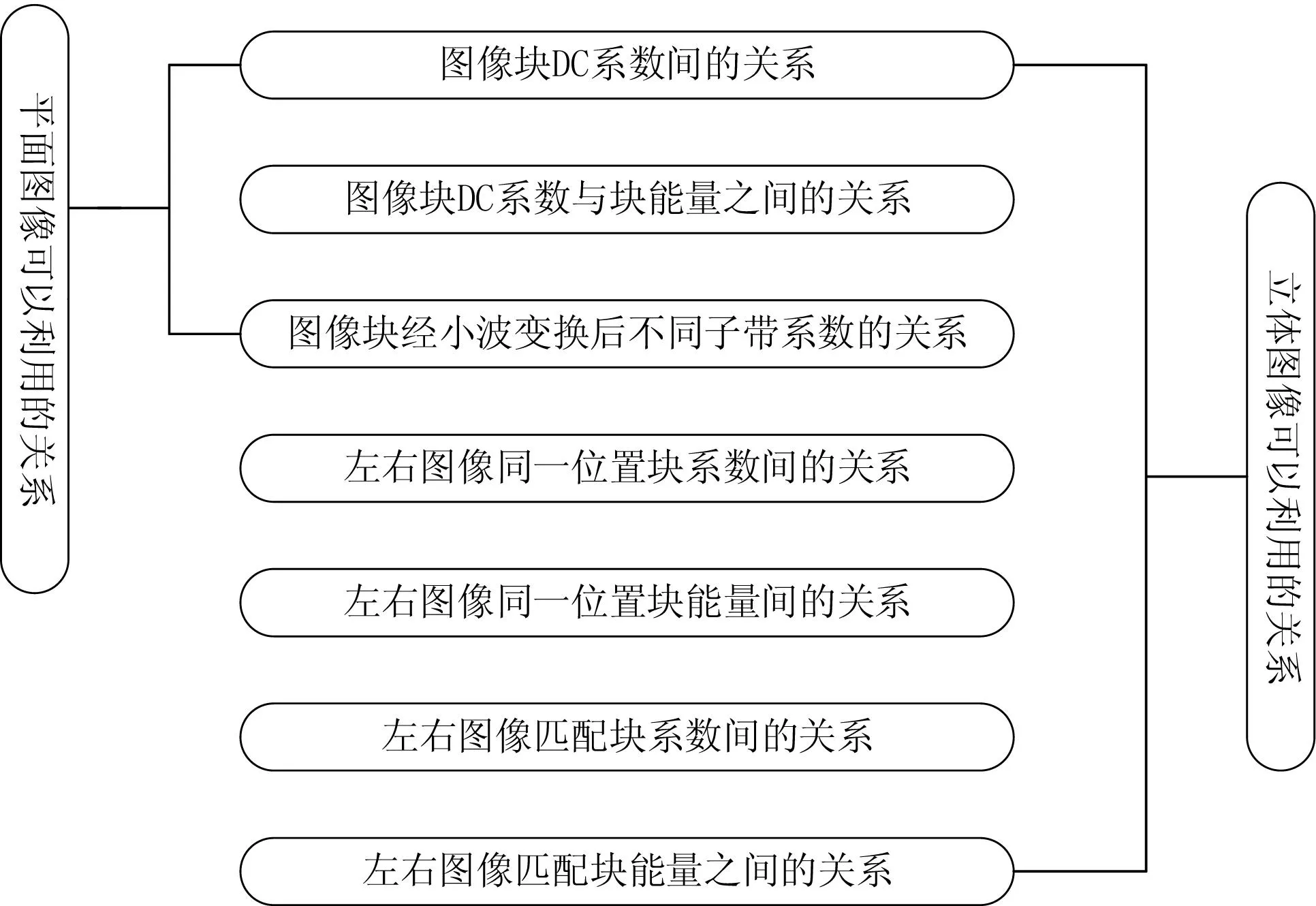
图6 可用关系对比图
2.3水印设计方案
基于以上原理,我们提出一种结合立体图像特征和左右视图关系两方面特征的水印方案,方案流程图如图7所示。

图7 设计方案
本文先求出立体图像左右视点图像的全局视差k,将视差k作为密钥存储,然后根据密钥k(全局视差偏移距离)找出左右图像的相似区域,在相似区域内找到对应的关系进行嵌入水印[7-18]。
3立体图像水印嵌入和提取算法
本章根据前面的理论,提出了水印嵌入和水印提取的具体步骤,并且通过Matlab进行了仿真实验,列出了实验结果。
3.1水印嵌入
根据图8所示流程进行水印嵌入:

图8 嵌水印流程图
1.按照2.1中描述的,求取左右视点图像的全局视差k,根据k选定相似区域为水印嵌入区域;
2.将左右视图的相似区域分别分成不重叠的8*8的分块,分别对其进行离散余弦DCT变换;
3.读取二值水印图像,对齐进行置乱L次,得到水印图像w;
4.比较相似区域同一位置块的DCT系数中的DC系数大小关系,若左图像块的DC系数大于右图像块的DC系数,则标记块间关系为“1”,否则,为“0”;
5.判断左右图像第i个图像块对DC系数大小关系与二值水印图像第i个像素点值wi是否相等,如果二值同为“1”,或者同为“0”,则不对BL,i和BR,i进行修改,并记录嵌入方式sign(i)=0,然后转入步骤7;否则,转入步骤6;
6.记录嵌入方式为sign(i)=1,不对BL,i和BR,i进行修改;
7.若i 3.2水印提取 根据图9所示流程进行水印提取: 图9 提水印流程图 1.按照2.1中描述的,求取左右视点图像的全局视差k1,跟密钥中的k进行比较,如果相同,则说明立体图像全局视差没有被改变,进入步骤2;否则,水印提取失败; 2.根据密钥k,选出立体图像对的相似区域,将相似区域内的立体图像对分别分成不重叠的 8×8 块,进行离散余弦DCT 变换; 3.分别标记待检测的左右图像同一位置块的 DCT 系数大小关系,若左图像的 DC 系数大于右图像的 DC 系数,则标记块间关系为value=1,否则为value=0; 4.通过密钥得知当前图像块对的水印嵌入方式,不同的嵌入方式采用不同的检测方法,当标记的嵌入方式是0时,则水印信息为当前块的DC系数关系,即watermark=value;当标记的嵌入方式为1时,则水印信息与当前块的DC系数关系相反,即watermark=1-value; 5.若 i 6.根据水印图像的尺寸确定 Arnold 变换周期 N,将得到的水印信息再进行(N-L)次 Arnold 变换,得到最终提取的水印图像。 3.3实验结果 立体图像选择的是1800*544大小的左右格式图像,所以左右图像大小为900*544,左图像如图10所示,右图像如图11所示,水印图像大小为64*64,置乱次数为8。 图10 原始左图像 图11 原始右图像 图12 各种攻击后提取的水印 根据图12所示,实验结果表明:对于 JPEG 压缩、高斯攻击和SBS编码,本算法都有较高的鲁棒性。由于左右对应图像块受到同样的攻击,左右对应的图像块变化趋势一致,直流系数大部分还保留原来的对应关系,所以水印的鲁棒性较高。 4结论和讨论 本算法有以下几点优势: 1.相似区域内的对应块系数,没有作改变,只是记录了关系系数间的关系,水印的不可见性提高,对立体图像影响较小。 2.选取左右图像的直流系数嵌入水印,DC系数是能量集中区域,对应块间的大小关系比较稳定,能够提高水印的鲁棒性。 3.左右图像相同区域遭受攻击相同的情况下,对应块系数改变相同,这就满足数字水印鲁棒性的要求。 本文根据立体图像全局视差和左右图像间的对应关系,在块DC直流系数嵌入了水印,水印具有很高的不可见性和鲁棒性。通过对全局视差的检测,可以判断立体图像的全局视差是否被篡改;水印信息的提取可以做到版权认证。但是,当对左右图片分别进行不同的攻击,或者视频序列中有相似图片时,本文方法的准确性会大幅度降低,此时可以采取一些辅助方法提高系统准确度。 参考文献 [1]Niu Y,Souidene W,Beghdadi A.A Visual Sensitivity Model Based Stereo Image Watermarking Scheme[C].2011 3rd European Workshop on Visual Information Processing (EUVIP),2011:211-215. [2]王波.双目视差的立体视觉及其在技术课程教育中的应用[D].浙江工业大学,2012. [3]杨富宝.基于计算机三维立体视差映射的双目立体成像研究[J].电脑知识与技术,2011,12:2929-2931. [4]白春华.基于感知的立体图像数字水印技术研究[D].宁波大学,2013. [5]孙怡.双目视差测距中的立体匹配技术研究[D].南京邮电大学,2013. [6]吴爱红.面向立体图像/视频数字水印技术的方法研究[D].宁波大学,2012. [7]李雪芳,王让定,徐达文.基于DC直流系数的盲视频水印算法[J].宁波大学学报(理工版),2008,(02):155-158. [8]Ziegeler S B,Tamhankar H,Fowler J E,Bruce L M.Wavelet-based watermarking of remotely sensed imagery tailored to classification performance[C].Proceedings of the IEEE Workshop on Advances in Techniques for Analysis of Remotely Sensed Data,Washington DC,2003:564-579. [9]杨雄,冯刚,严雄兵,刘雄华.一种基于小波变换的数字水印算法[J].计算机应用,2005,25(3):565-566. [10]许红山.基于变换域的数字水印技术[J].计算机工程与科学,2004,26(1):47-50. [11]刘新焕,康志伟,王科技.基于H.264/AVC的快速半脆弱水印算法实现[J].计算机应用研究,2010,27(7):2618-2624. [12]岳斌,侯春萍.立体视差调整的快速估计方法[J].天津大学学报(自然科学与工程技术版),2013,(07):571-578. [13]崔雪冰,冯巧娟,崔平非.基于内容特征的MPEG视频认证方案[J].计算机应用,2010,30(1):213-216 [14]Wang J,Liu J C,Masilela M.A real-time video watermarking system with buffer sharing for video-on-demand service[J].Computers and Electrical Engineering,2009,35(2):395-414. [15]刘芳红,张贵仓.一种基于关系的数字水印算法[J].自动化技术与应用,2011,(02):13-16. [16]李毕祥,余红珍.基于DCT系数的视频水印算法研究[J].计算机与数字工程,2010,(05):108-110. [17]Dai Y.Feature-based Watermarking Scheme for MPEG-I/IIVideo Authentication[C].Proceedings of SPIE,the International Society for Optical Engineering,2004:325-335. [18]Doerr G.Dugelay J L.A guide tour of video watermarking[J].Signal Processing:Image Communication,2003,44(18):263-282. (责任编辑:王谦) Watermarking Algorithm Research Based on Stereo Images ZHAO Wen-long,YU Shui-yuan (Computer Science School,Communication University of China,Beijing 100024,China) Abstract:The paper is to propose a three-dimensional image watermarking algorithm according to the global disparity and the corresponding relationship between the left view and the right view,which can solve the stereo image copyright protection and content authentication problem .Firstly,analyze the characteristics of stereo images,compute the global disparity according to the left and right views,then work out their similar area.Taking advantage of the corresponding relationship between the left view and the right view,we embed the watermark into the similar area.The block energy gathers in the DC coefficients whose corresponding relationship is stable in the left and right views.In this sense,we choose the DC coefficients of Y component for embedding watermark,which can make a higher robustness watermark.The simulation experimental results show that the watermark is remarked for invisibility and high robustness,and is resistant to high strength jpeg compression,Gaussian and SBS code attack as well. Keywords:stereo images;left and right views;global disparity;luminance component;DCT 作者简介:赵文龙(1989-),男(汉族),河南商丘人,中国传媒大学硕士研究生.E-mail:1248351595@qq.com 收稿日期:2015-01-05 “十二五”国家科技支撑计划重点项目“开放网络环境下的立体电视制播系统研制与应用规范”(项目编号:2013BAH54F00) 中图分类号:TP309.2 文献标识码:A 文章编号:1673-4793(2015)03-0040-06