带式输送机带速监测平台设计
2015-02-18 09:31:44范诗琪李梓龙
物流技术 2015年3期
范诗琪,吴 青,曾 飞,2,李梓龙
(1.武汉理工大学 港口装卸技术交通行业重点实验室,湖北 武汉 430080;2.南通大学 交通学院,江苏 南通 226019)
1 引言
我国作为世界港口大国,近年来港口建设数量、规模、年吞吐量、面积都以惊人速度增长,随之引发的能耗问题日益显著。截止2011年底,我国共有生产用码头泊位31 968个,港口货品吞吐量和集装箱吞吐量持续9年位居世界第一。作为港口散料装卸关键设备之一,带式输送机因通常以恒定转速运行,当皮带空载或者轻载状态时,能源浪费巨大。为发展节能调速技术,必须优化研究带速测量。然而,在电频器调节电机速度的过程中,由于皮带具有粘弹性,电机频率转换的速度不能直观反映带速[1]。因此,设计一种方案以实时监测带式输送机皮带的速度至关重要。
散货码头带式输送机带速监测平台是一种优化带速控制和实现带速闭环控制的重要前提。国内外研究中通过建立准确的带速控制模型以实现带速闭环控制至今还是一片空白[2~5]。带速监测平台的设计在满足基本需求的基础上,应还具有一定的可扩展性。因此,通过分析带式输送机对带速远程监控的需求,结合输送带动力学特性,本文设计并开发了一套带式输送机带速远程监测装置。
2 带速远程监控系统设计方案
带式输送机带速监测平台主要由本地设计和远程设计组成。本地设计主要由单片机最小系统、速度检测模块、电源、显示模块、远程通讯模块等组成,远程设计可以由服务器、手机终端等组成。系统结构图如图1所示。
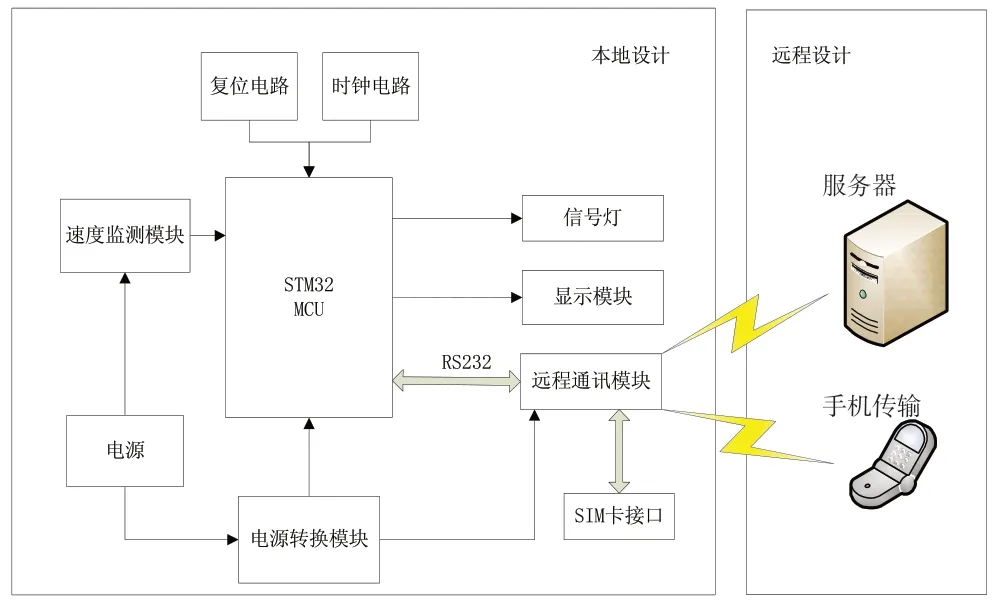
图1 系统结构图
对于散货码头带式输送机,皮带机托辊和驱动滚筒都能反映皮带速度[6-7],从测量稳定性和安装方便性考虑,本文选择了在带式输送机的驱动滚筒安装光电编码器的测速方式。其中光电编码器需要由支架固定[8-9],固定光电编码器的支架由两块环氧树脂板通过角铁连接而成,其中一块板固定在驱动滚筒一侧的皮带机框架上,另一块垂直于上一块且中心打孔用于安装光电编码器。光电编码器的接头与一匹配的安装轴用联轴器相连,安装轴与驱动滚筒中的孔过盈配合,如图2所示:
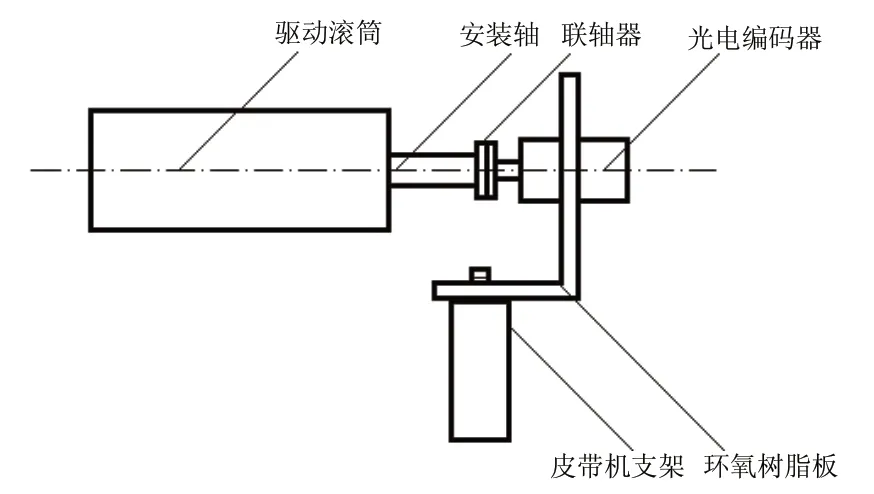
图2 传感器安装示意图
3 带速远程监测系统硬件设计
设计中,首先在带式输送机上加装传感器,实现对皮带机带速的实时测量和远程监控。通过传感器采集数据信息,单片机根据所检测的信号实现转速测量即驱动滚筒的转速,经过计算转换为皮带机的线速度,由显示模块实时显示带速,通讯模块完成信息远程传输。带式输送机速度远程监测系统的硬件电路设计包括电源转换电路设计、单片机系统模块电路设计、传感器模块电路设计、液晶屏模块电路设计、远程监控模块设计。
3.1 单片机系统设计
散货码头带式输送机带速远程监测系统的关键是完成速度监控和带式输送机的信号处理。采用单片机作为整个系统的核心就可以充分发挥其强大的控制功能和价格低廉等优点。在这里本文选用STM32F103处理器作为主控装置。主控装置的最小系统包括微型处理器、时钟电路以及复位电路,同时设计有JTAG接口电路。在应用上,用STM32F103设计系统简单方便,具有复用IO 口重映射功能,为PCB 制板提供了便利,且全部引脚都可以作为中端输入。
3.2 电源转换设计
电源是带式输送机带速监测系统的动力来源,负责为单片机、传感器、显示器等硬件提供稳定可靠的电压。该系统由一个5V 电源供电,但是单片机需要+3.3V 电源,所以使用AMS1117-3.3 电源转换电路将5V 电源转化为3.3V 电源供STM32F103 处理器使用,结合选用并联电容电路的方式滤除交流。同时,在电路中加入稳压管SMLVT3V3,反向击穿电压是3.3V,击穿电流200μA,它起到了稳定直流电压的作用,并限定电路中的工作电流,使电路工作在合适的状态。
3.3 传感器模块设计
光电编码器作为本设计选用的传感器,具有将转速转化为线速度的作用。由于其输出信号为数字信号,数据采集更为便捷。光电编码器有增量式、绝对式两种。其中,增量式光电编码器不仅精度高、体积小,而且性能稳定、性价比更好,因此,相比于绝对式光电编码器具有更为广泛的应用。光电编码器测量皮带速度,选用的是增量式光电编码器,可以直接运用光电转换原理,由输出轴输出数字脉冲信号,交由单片机进行处理。
系统加装的光电编码器,选用分辨率为1 000P/R 的欧姆龙编码器。工作时光电编码器被驱动滚筒带动,输出方波信号,即光电编码器每转1圈产生1 000个脉冲,就会有1 000个上升沿输出,通过数脉冲个数就可以知道光电编码器转了多少圈,即驱动滚筒轴转了多少圈,由此可得总圈数,进一步可求得皮带速度。
3.4 液晶屏模块设计
本设计是通过LCD1602液晶显示屏实时地显示皮带的速度。显示原理是,显示模块通过单片机接收速度信号,通过控制程序将ASCII码转化为字符。
3.5 远程监控模块设计
GSM 模块用到的是西门子公司经典的蜂窝通信引擎TC35i终端。该模块有标准的RS-232接口,提供标准的AT命令接口,符合ETSI 标准GSM07.07 和GSM07.05,可支持短消息、数字、语音消息发送,提供可靠、安全、高效的传输,方便应用开发及设计。
4 带速远程监测系统软件设计
系统软件主要包括中断服务程序和功能函数两个部分。首先,系统软件通过初始化单片机,使单片机处于工作状态;当单片机收到某些模块的中断请求,便开始调用该模块的中断服务程序;等中断程序结束后,单片机开始调用关键的功能函数进行数值计算,比如速度计算等;通过得到的脉冲信号来驱动LCD1602显示数字并计算脉冲数以及由定时器中断服务程序得到时间,就可以计算出皮带的速度;并通过通讯模块完成信息的传递。
4.1 速度与显示算法
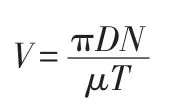
单片机在捕捉到一个脉冲上升沿时就产生一次中断,此时脉冲数加1,光电编码器每转1 圈输入1 000 个脉冲。设计采用设置两级中断定时器脉冲总数每5μs 自加1,计数脉冲数u16PulseCounter2每10ms归零一次。系统将10ms内的脉冲数转化为皮带机皮带的线速度。与光电编码器相连接的驱动滚筒每转1 圈输出1 000 个脉冲,所以u16PulseCounter2/1 000 就是指光电编码器在这段时间内转的圈数。驱动滚筒直径D为222mm,位移量是(u16PulseCounter2/1 000)*π*222,时间为10ms,即0.01s,因此速度V=698*u16PulseCounter2/10;在下一个10ms 中断之前计数脉冲数被置0,即u16PulseCounter2=0。设光电编码器转速为μ(P/R),中断时间为T(s),驱动滚筒直径为D(mm),中断时间内的脉冲数为N,则带速V(mm/s)的计算公式如下:
单片机内部处理传感器的信号计算脉冲数,同时驱动液晶屏显示数字。通过编程对LCD1602 进行管脚配置,设置两行显示,配置写指令函数和写数据函数,第一行显示数据中,把5位数字的万位、千位、百位、十位、个位上的数字分别提出来,再显示在屏幕上,数字提取如下:wan=count/10 000;qian=count%10 000/1 000; bai=count%1 000/100;shi=count%100/10;ge=(int)(count%10)。
4.2 远程通讯模块配置
在收发短信方面,共产生三种模式,分别为:BLOCK 模式(快模式)、TEXT 模式(文本模式)和PDU 模式。BLOCK 模式需要生产厂家提供驱动支持;TEXT 模式开发方便简单,但只能发送ASCII 码;PDU 模式则发送图片、铃声、中文。这里使用TEXT就可以了。短信模式下的数据发送流程如图3所示。

图3 短消息发送流程图
[1]曾飞,吴青,初秀民,等.散货码头带式输送机调速节能研究进展[J].制造业自动化,2013,35(9):1-4.
[2]盛涛,于岩,于卉,等.带式输送机带速检测系统的设计应用[J].煤矿机械,2009,30(2):133-134.
[3]秦培均.煤矿井下带式输送机打滑故障分析及预防[J]. 煤矿机械,2013,34(7):211-213.
[4]Walke B.The Roots of GPRS:the First System for Mobile Packet-Based Global Internet Access,Wireless Communications[J].IEEE,20,(5):12-23.
[5]尹少杰,孙进生,孙怀湘.带式输送机故障定位系统网关的设计[J].工矿自动化,2012,(2):71-75.
[6]冯英翘,万秋华.小型光电编码器细分误差校正方法[J].仪器仪表学报,2013,34(6):1 374-1 379.
[7]Hiltermann J,Lodewijks G,Schott D L,Rijsenbrij J C,Dekkers J A J M,Pang Y.A Methodology to Predict Power Savings of Troughed Belt Conveyors by Speed Control[J].Particulate Science and Technology,2011,29(1):14-27.
[8]张宝剑,余周.带式输送机故障检测技术的研究[J].矿山机械,2013,(8):53-56.
[9]马晶晶,王广丰,张飞,等.带式输送机输送带断带和打滑综合监测装置设计[J].煤矿机械,2013,34(9):166-168.
猜你喜欢
幼儿教育·教育教学版(2022年10期)2022-07-04 13:55:50
冶金设备(2021年1期)2021-06-09 09:35:28
中国设备工程(2020年16期)2020-08-28 09:04:16
科学技术创新(2020年20期)2020-08-11 04:10:38
冶金设备(2019年6期)2019-12-25 03:08:52
制造技术与机床(2019年11期)2019-12-04 05:49:50
测控技术(2018年6期)2018-11-25 09:49:58
通信电源技术(2018年8期)2018-10-15 07:02:20
设备管理与维修(2016年7期)2016-04-23 06:51:36
橡胶工业(2015年6期)2015-07-29 09:20:32