
电机控制器限流对车辆匹配影响的试验研究
2015-02-16 07:51王红雷龙成冰张振闯
武汉理工大学学报(信息与管理工程版) 2015年6期
付 翔,王红雷,龙成冰,杨 宁,黄 斌,杨 奎,张振闯
(1.武汉理工大学 汽车工程学院,湖北 武汉 430070;2.神龙汽车有限公司 市场部,湖北 武汉 430056)
电机控制器限流对车辆匹配影响的试验研究
付 翔1,王红雷1,龙成冰1,杨 宁2,黄 斌1,杨 奎1,张振闯1
(1.武汉理工大学 汽车工程学院,湖北 武汉 430070;2.神龙汽车有限公司 市场部,湖北 武汉 430056)
结合电机控制理论,从理论上分析电机控制器限流对电机性能的影响,发现采用矢量控制的电机控制器限流时,可以改变电机的输出外特性。设计并搭建试验台架,对比分析电机控制器限流前后电机的输出外特性。结果表明,限流使得电机的最大输出扭矩变小,额定转速向后偏移。因此,电机控制器限流降低了电动汽车的动力性,提高了电动汽车的经济性。在对电动汽车系统进行匹配时,从限流的角度来说,将电机及电机控制器作为一个整体考虑能使车辆的动力系统匹配更加合理,满足车辆动力性和经济性需求。
电动汽车;电机控制器;限流;匹配技术;试验研究
电机及电机控制器是电动汽车驱动系统的核心部件之一。电动汽车驱动电机主要包括直流电机、感应电机、永磁同步电机和开关磁阻电机4类[1],而永磁同步电机因能量密度高、调速范围广、体积小,得到广泛应用和研究[2]。矢量控制实现了对磁场和转矩的完全解耦,控制力矩稳定,技术较为成熟,被广泛应用[3]。电机控制器对电机进行控制的同时,还进行过压、过流和欠压保护。电机控制器限流保护了动力电池、电机控制器和电机等设备,提高了电动车辆的安全性和使用寿命,同时也影响了驱动电机的输出特性。文献[4-6]在电动汽车匹配进行电机选择时,未考虑电机控制器限流的影响。但在实际的车辆动力系统匹配工作时,不仅要考虑电机自身的特性,而且要考虑电机及电机控制器系统的特性,这样才能更好地利用电机的性能。以永磁同步电机为研究对象,研究电机控制器限流保护对电机输出特性的影响,提出将电机及电机控制器作为整体对电动汽车匹配技术有着重要的意义。
1 驱动系统电机控制器限流的理论分析
1.1 驱动系统电机控制器限流的影响分析
驱动电机性能除了取决于自身因素,还受到所匹配电机控制器的影响。电机控制器进行限流时,若限流值过小,则电机启动困难、运转慢、转矩小;若限流值过大,则电机控制器在车辆起步、加速、爬坡时,输出功率过大,失去限流保护的作用,易烧毁电器元件,且使得车辆能耗变高,续驶里程减少。因此,合理选择电机控制器的限流值具有重要意义。
1.2 限流对驱动系统电机性能的影响
同步电机稳定运行时,运行转速与定子电频率和极对数有关,与负载无关,为恒定常数[7]。对于永磁同步电机,在矢量控制方法下,电机的控制分为3个阶段:最大转矩电流比控制、普通弱磁控制、最大输入功率弱磁控制[8]。基于Clark变换和Park变换,矢量控制方法下的转矩Te为:
Te=P[ψfiq+(Ld-Lq)idiq]
(1)
式中:P为极对数;ψf为转子永磁体磁链;iq为电机电流在交轴上的分量;id为电机电流在直轴上的分量;Ld为直轴绕组等效电感;Lq为交轴绕组等效电感。
在恒转矩控制阶段,常用最大转矩电流比控制,即电机在给定转矩下运行时,使控制电流最小。该方法所得直交轴的电流为:
(2)
式中,is为旋转坐标系下的电枢电流值。
结合式(1)和式(2)可知,只需控制id和iq保持恒定,就能使得电机输出转矩Te恒定。
在恒转矩控制过程中,电枢绕组的反电动势随着电机转速的升高而升高,当与电机的极限电压ulim相等时,电机达到该控制方式下的最高转速,即拐点转速,用电角速度ωb表示。电机在恒转矩控制过程中,转矩不变,功率线性增加并在拐点处转速达到最大。
当电机转速达到恒转矩下的最大转速时,要提高转速必须进行弱磁。永磁同步电机的弱磁控制通过增加定子电流的去磁电流分量来实现弱磁升速[9]。当ψf>Ldis时,有:
(3)
当ψf≤Ldis时,有:
(4)
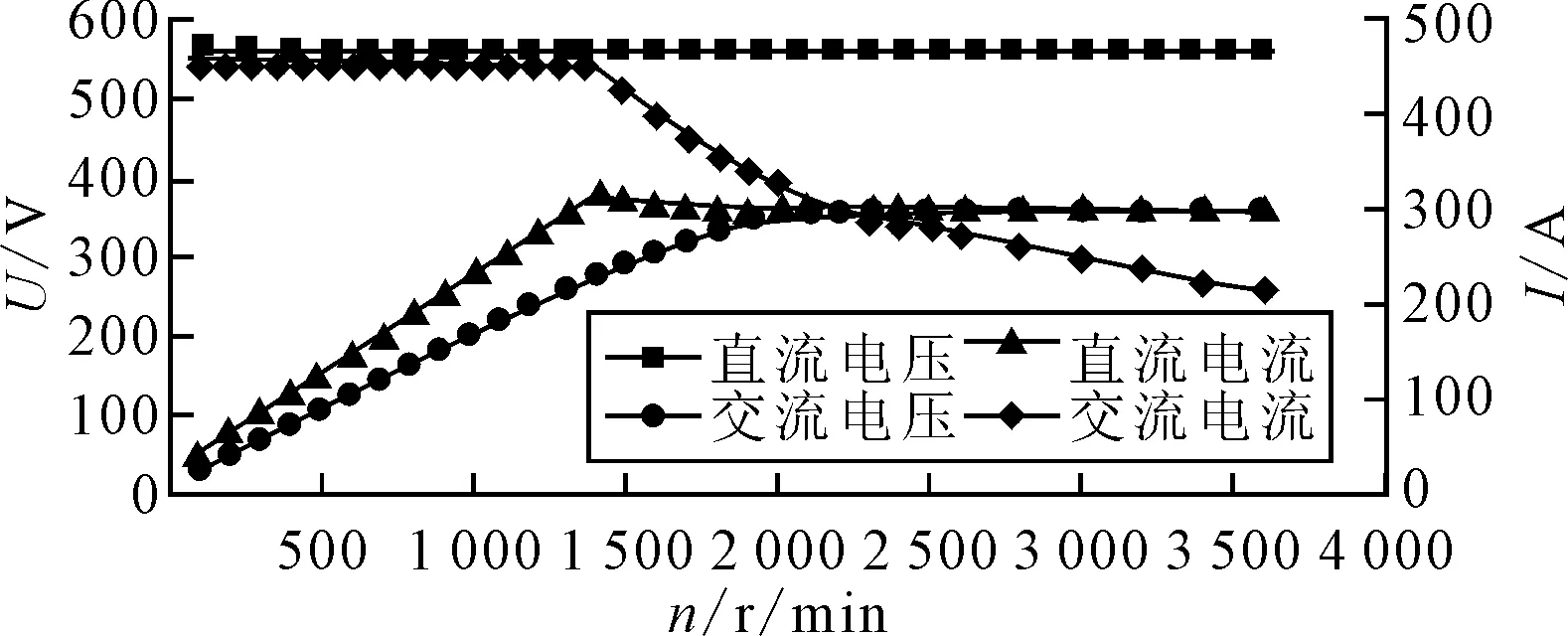
当ψf 结合式(1)、式(3)和式(4)可得,当电机的转速超过拐点转速后,只需求出相应转速下的id和iq,即可得到相应的输出转矩。对于电机系统,忽略粘性摩擦和扭转弹性,则电机的驱动机械方程为: (5) 式中:TL为负载转矩;J为转动惯量;ω为电机角速度。 由式(5)可知,电机系统通过外界负载扭矩实现转速与扭矩的耦合和平衡。电机的转速和转矩控制均通过对id和iq电流的控制来实现,电机控制器本质上是一个电流控制系统。在永磁同步电机中,经过反Clark变换和反Park变换,控制id和iq电流实际是控制定子的三相电流。 电机高速旋转时,电压方程中由电阻引起的压降很小,可以忽略不计[10],电机的直交轴电压方程为: (6) 式中:ud为电机电压在直轴上的分量;uq为电机电压在交轴上的分量。受电机控制器电压的限制,电机电压幅值us满足: (7) (8) 式中,uDC为电机控制器母线电压。 联立式(6)~式(8)可以得到: (Lqiq)2+(Ldid+ψf)2≤(uDC/ω)2/3 (9) (10) 由式(9)和式(10)可得电机的角速度ω及其极限值方程: (11) (12) 电机电流同样受到电机控制器的限制,电机稳定运行时,若电机控制器最大限流为Ilim,则: (13) 由式(7)~式(13)可知,当电机稳定运行时,电压值由id和iq决定。而极限状态下的us、ω、id和iq受到Ilim、uDC及控制方法的限制。 当电机处于恒转矩控制阶段时,要求输出转矩恒定,id和iq受到式(13)的限制;当uDC一定时,最高电角速度ωb受到式(12)的限制。当电机控制器限流时,使得Ilim减小,从而减小了式(2)计算所得的极限id和iq;由式(1)可知电机的最大输出转矩变小;由式(11)可知相同电机转速下,电机的输出最大电压变小;由式(12)可知电机的拐点转速变大,即向后偏移。 当电机处于普通弱磁控制阶段时,极限电压由恒转矩控制下的可调极限电压决定,为恒定值,此时求得的id和iq为最大值。当转速超过极限转速后,随着转速的增大,式(3)和式(4)所得的id和iq均减小,但其值均满足式(13),即普通弱磁控制下,改变电机控制器的限流值并不会改变电机的输出特性。在此控制阶段,电机的三相电流随着转速的增大而不断减小,三相电压保持最大值。 图1 某款永磁同步电机实测外特性机械性能 图2 某款永磁同步电机实测外特性电参数变化曲线 经过上述分析可知,电机的额定转速实际为恒转矩控制下的极限转速;电机的最高转速实际为普通弱磁控制下的极限转速,同时受到电机控制器可调频率范围、电机控制器及电机元器件的耐高温条件的限制;电机控制器的输入直流电压影响电机的输出外特性;电机控制器限流时,限流值越小,电机的最大转矩越小,额定转速向后偏移越大。采用矢量控制的永磁同步电机的外特性下的输出电流、电压、转速、转矩和功率呈现如图1和图2所示的关系。 2.1 试验台架搭建 电动汽车所选配的驱动系统在装车之前需进行性能测试,基于电驱动式自动变速器[11]搭建测试台架,测试电动汽车驱动系统性能。测试台架主要包括测试系统、被测试系统、控制系统、数据采集系统及其他附件,如图3所示。 图3 测试台架系统构成 由上述分析可知,电机控制器的限流值主要影响电机的输出外特性,在电机控制器限流值分别为600 A和500 A下进行电机的对比试验,所测试电机及电机控制器的参数如表1和表2所示。 表1 所选永磁同步电机参数 表2 所选电机控制器参数 2.2 试验结果与分析 在电机控制器限流值分别为600 A和500 A下,试验测得电机外特性对比如图4所示,效率对比如图5所示。 图4 不同限流值下电机外特性输出曲线 图5 不同限流值下效率对比 由图4可知,电机控制器的限流值越小,其额定转速前的输出峰值扭矩越小,额定转速越向后偏移;当超过额定转速时,电机控制器的限流值不改变电机的输出转矩、功率和极限运行转速。 由图5可知,电机控制器的限流值不改变电机控制器的运行效率,但电机的运行效率随着限流值的增大而减小,同时由于额定转速的改变,使得电机的最佳效率点也有所变化。因此,电机控制器限流同样影响着电机及电机控制器系统的整体效率。不同限流值下的电机峰值特性对比如表3所示。 表3 不同限流值下的参数值对比 3.1 现有电动汽车匹配方法 车辆在进行匹配计算时,先根据动力性指标选择所需匹配的驱动系统,再根据所选驱动系统进行经济性核算。在动力性匹配计算中,最高车速、加速性能和爬坡性能是最重要的3个动力性指标,其中最高车速决定驱动系统的最高转速和最大输出功率,加速性能决定驱动系统的最大输出功率,爬坡性能决定驱动系统的最大输出转矩。在确定动力系统各个参数之后,再根据相应的循环工况进行经济性核算[12]。对于电动汽车,电机在超调状态下输出最大转矩,但只能维持一定时长,不能持续输出[13]。由于电机与发动机在该性能上的差异,使得电动汽车在进行匹配计算时需考核更多的参数,如最高巡航车速、经济运行车速和续驶里程等。 现今电动汽车的匹配技术中,一般先依据动力性指标确定电机,再依据所选电机匹配电机控制器,然后依据车辆的运行工况和续驶里程要求来匹配动力电池,最后依据所选的各个部件的参数对车辆的动力性指标和经济性指标进行核定。显然,在该匹配技术中,电机的选择具有重要意义,电机对电机控制器、动力电池等存在影响,但若忽略电机控制器或动力电池对电机的影响,会使整个车辆的匹配过程存在一定的不合理之处。 3.2 电机控制器限流对车辆匹配技术的影响分析 电机控制器的限流使得电机的输出外特性发生了改变,从而在对车辆进行匹配时会对整车的性能指标产生影响,如图6所示。 图6 不同限流值对车辆匹配性能影响 由图6可知,车辆的最高车速umax处于电机最高转速附近(额定转速之后),故限流对umax无影响;限流值越小,最大输出驱动力越小,使得整车的爬坡性能降低。在电动汽车中,最高巡航车速指车辆能够持续稳定运行的最高车速,一般采用电机额定转速略向后转速下对应的车速估算,此时电机输出功率约为额定功率,可采用图6中的u1、u2进行比较。经济运行车速一般采用电机额定转速下略向前的转速对应的车速估算,略小于最高巡航车速。再结合图5可知,电机控制器的限流改变了电机的额定转速和效率,最高巡航车速和经济运行点,使得匹配的车辆运行在相同车速下,对应的电机运行在相同的状态下,限流值越小,整车的经济性越好。 以永磁同步电机的矢量控制为例,从理论上得出电机控制器限流值越小,电机的最大输出转矩越小,额定转速向后偏移越大,但对电机额定转速后的输出特性无影响的结论;并对永磁同步电机及电机控制器进行不同限流值的试验验证,试验结果与理论分析所得结论相同,结果表明电机控制器不同的限流值会使电机的峰值性能、高效工作区间与拐点产生变化,因此应将电机及电机控制器作为整体对电动汽车进行匹配,才能更好地满足整车的动力性和经济性要求。在车辆实际运行中,动力电池电压波动同样影响电机的输出特性,在电动汽车的匹配技术中也应考虑其影响。 [1] 柴海波,鄢治国,况明伟,等.电动车驱动电机发展现状 [J].微特电机,2013,41(4):52-57. [2] 王秀和.永磁电机[M].北京:中国电力出版社,2007:251-256. [3] 郑泽东,李永东.永磁同步电机控制系统综述[J].伺服控制,2009(1):22-26. [4] 杨芸芸.充电式混合动力城市客车设计及仿真[D].武汉:武汉理工大学,2010. [5] 周飞鲲.纯电动汽车动力系统参数匹配及整车控制策略研究[D].长春:吉林大学,2013. [6] 朱曰莹,赵桂范,杨娜,等.电动汽车动力系统参数匹配及优化[J].哈尔滨工业大学学报,2013(7):90-95. [7] STEPHEN J C.电机学[M].刘新正,苏少平,高琳,等,译.北京:电子工业出版社,2012:169-185. [8] 杨光亮.车用永磁同步电机控制方法研究[D].大连:大连理工大学,2009. [9] 温有东.电动汽车用永磁同步电机的研究[D].哈尔滨:哈尔滨工业大学,2012. [10] 张岳.电动车用永磁电动机设计及弱磁控制[D].杭州:浙江大学,2014. [11] 曹正策.基于电驱动自动变速器(EMT)的Plug_in并联混合动力系统研究[D].武汉: 武汉理工大学,2011. [12] 陈继龙.汽车动力传动系统仿真的研究[D].西安: 西安科技大学,2013. [13] 何洪文,余晓江,孙逢春,等.电动汽车电机驱动系统动力特性分析[J].中国电机工程学报,2006,26(6):136-140. FU Xiang:Assoc. Prof. ; School of Automotive Engineering, WUT, Wuhan 430070, China. [编辑:王志全] Experimental Study on Influences of Motor Controller Current-limiting on Electric Vehicle Matching FUXiang,WANGHonglei,LONGChengbing,YANGNing,HUANGBin,YANGKui,ZHANGZhenchuang The Influences of motor controller current-limiting on the performance of motors were theoretically analyzed combined with motor control theories. It was found that the motor output characteristic can be changed when the vector control method was used to limit current of motor controller. A test bench was designed and built to achieve the comparative analysis of the motor output characteristics before and after limiting current of the motor controller. The results show that current- limiting decreased the maximum output torque of the motor and shifted rated speed backwards. Therefore, limiting current of motor controller decreases the electric vehicle power performance and changes the economic operation point of electric vehicles. From the perspective of current-limiting, the paper shows that motors as well as motor controllers should be considered as a whole to make the vehicle power train matching more reasonably and meet the demands of vehicles power performance and fuel economy when matching power system of electric vehicles. electric vehicle; motor controller; current-limiting; matching technology; experimental investigations 2015-03-17. 付翔(1973-),女,湖北随州人,武汉理工大学汽车工程学院副教授;博士. 中央高校大学生自主创新资金资助项目(2014-II-004);武汉市科学技术局科研基金资助项目(2013011801010596). 2095-3852(2015)06-0671-04 A U469.72 10.3963/j.issn.2095-3852.2015.06.002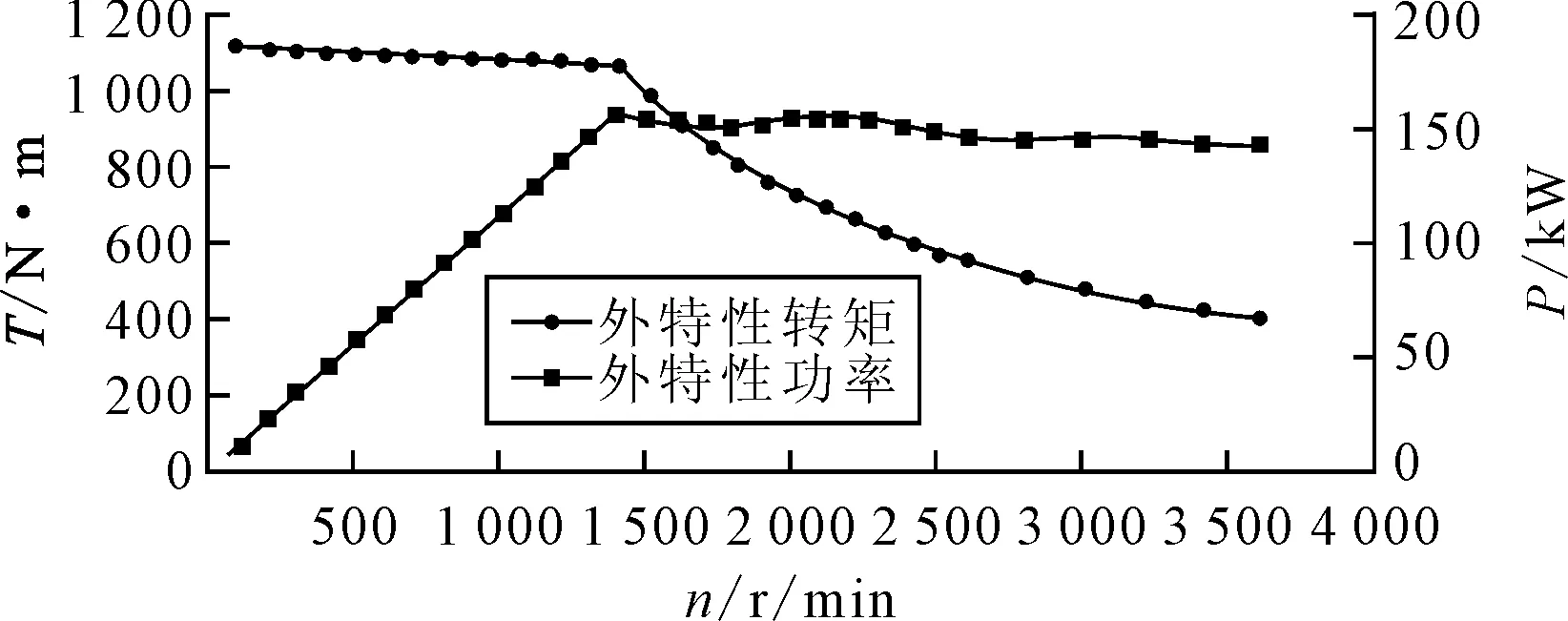
2 电机控制器限流对电机影响的台架验证






3 电动汽车匹配技术研究

4 结论
猜你喜欢
电力自动化设备(2022年11期)2022-11-19
防爆电机(2022年3期)2022-06-17
电气技术(2022年1期)2022-01-26
防爆电机(2020年6期)2020-12-14
装备制造技术(2018年8期)2018-10-17
汽车维护与修理(2018年1期)2018-04-04
作文周刊·小学一年级版(2017年27期)2017-08-10
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年20期)2016-04-11
中国科技信息(2015年18期)2015-11-10
